E-Bobby Car Controller
Dezember 2019
Inhaltsverzeichnis

Um dabei nicht immer zwei MCU’s zu flashen soll diese Steuerung von einem separaten Controller übernommen werden. Dieser wird per USART mit beiden Hoverboard Mainboards verbunden werden und so alle Motoren steuern können.
Desweiteren nutze ich den hoverboard-firmware-hack Fork von Emanuel Feru. Dort ist die Steuerung über USART sicherer implementiert.
Der Controller, umgesetzt durch einen STM32F103C, besser bekannt als Bluepill, kostet als Devboard fast nichts und bestitzt drei Hardware USART .. und ist kompatibel zu Arduino.
Zur Einbindung in die Arduino IDE hilft diese Anleitung: STM32bluepillarduinoguide(1).pdf
Die Hardware files (Step 1) dazu besser direkt von Github beziehen: github.com/rogerclarkmelbourne/Arduino_STM32
Das Hoverbrett habe ich zuvor dazu genutzt, diese Steuerung auszutesten. Ein Stepdown versorgt einen 3.3V Linearregler mit 5V aus der Batteriespannung. Beim Hoverbrett habe ich diese nach der Latchschaltung des Hoverboardmainboards abgegriffen; das Mainboard schaltet die Bluepill dadurch mit an. Im Bobbycar wollte ich jedoch nicht eines der Mainboards für die Spannungsversorgung des hinzukommenden Controllers verantwortlich machen.
Die Latch Schaltung hab ich dazu aus dem Hoverboard Schaltplan entnommen und auf eine kleine Platine aufgebaut.
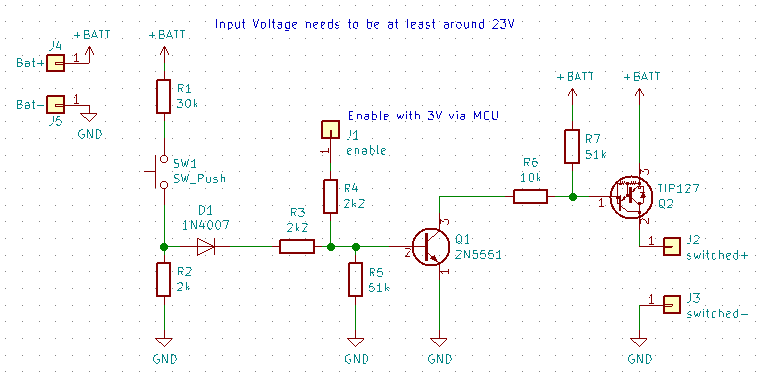

Nachfolgend der Schlacht.. äh Schaltplan. Bei der Menge an Kabeln find ich ja sonst nix mehr wieder.
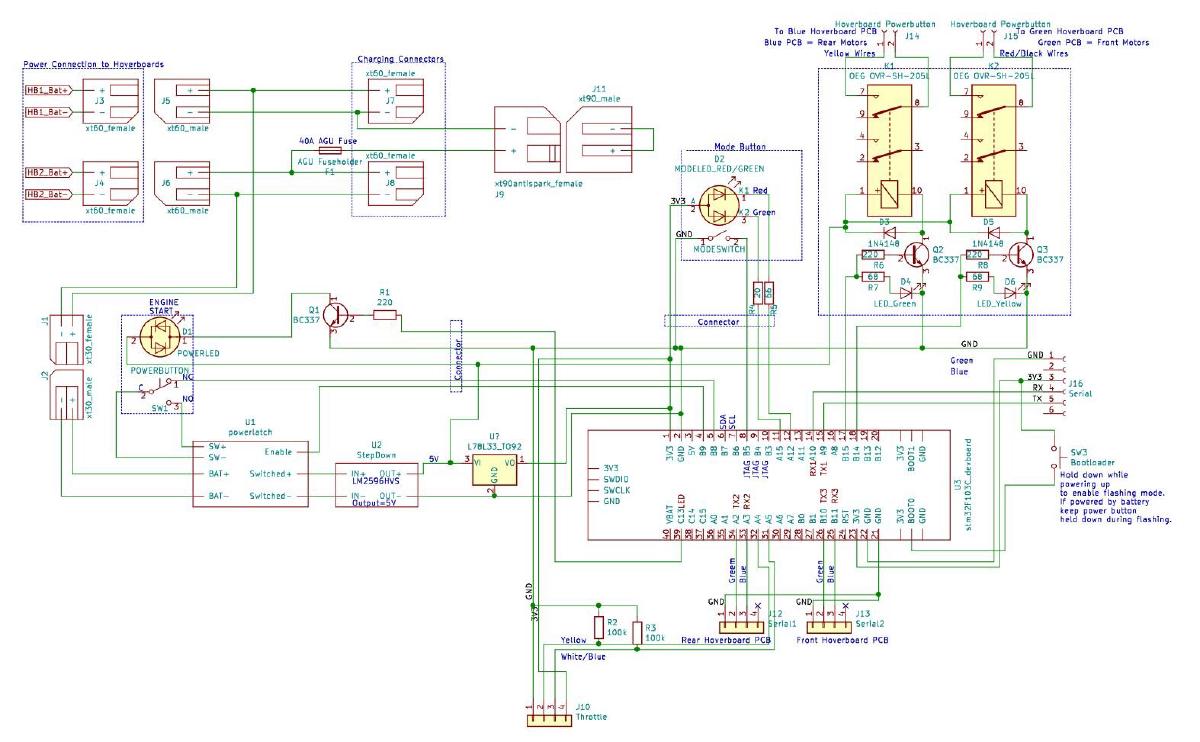
PDF Download:20191217_bobbycar_wiring.pdf
Nachdem zwei neue Knöpfe, die Latch Schaltung zusammen mit dem LM2596HVS Stepdown und einigen Steckern an das STM32 board gelötet waren wurde es Zeit alles am bobbycar zu testen.
Nach initialem bug fixing drehten alle Räder wieder.


Der controller wird durch den neuen “Engine Start” Knopf hinter der Lenkstange eingeschaltet. Erneutes Drücken aktiviert zwei Relais, welche die Powerschalter der beiden Hoverboards simulieren. Das lässt sich vermutlich deutlich eleganter umsetzen, jedoch schien das mir der Problemfreieste Weg. Und es klickert ganz toll :) Die ursprünglichen Taster sind weiterhin parallel dazu angeschlossen für den Fehlerfall.

Auf dem 35C3 war mir nach exzessiven Fahren auf der Teststrecke das Kabel vom Gashebel gebrochen. Diesmal verlege ich es daher nicht im Alurohr.
Zwei Stücke Pneumatikschlauch fixieren von nun an das rot eloxierte Alurohr.
Der “Start Engine” Knopf ist rot beleuchtet, der Schalter im Tankdeckel besitzt eine Rot/Grün Duo-LED. Alle lassen sich Softwareseitig steuern.


Bobbycar Git: git.ctdo.de/interfisch/bobbycar