Schrittmotor Ansteuerung L6208
August 2013
Inhaltsverzeichnis
- Einleitung
- Ansteuerung (L297 / L298)
- Ansteuerung L6208

Für ein nächstes Projekt brauchte ich eine Schrittmotorsteuerung. Da ich dafür aber nur einen Schrittmotor mit einstellbaren Geschwindigkeiten drehen möchte lohnt es sich nicht wirklich, extra eine Steuerung dafür zu bauen.
Desswegen wollte ich eine universelle Schrittmotorsteuerungsbox bauen, sodass ich sie auch für andere Projekte einsetzen kann.
Neben den mittlerweile stark veralteten L297/L298 gibt es auch noch einige aktuellere.
Darunter zähle ich mal den L6208 (Datenblatt). Er beinhaltet die Ansteuerung, sowie die H-Brücke mit ein paar Features. Zudem ist er im Vergleich zum L298 deutlich effizienter (kann also bei kleineren Motoren locker ohne Kühler betrieben werden) und kann mit etwas externem Beiwerk nebst Full- und Half- auch Microstepping. Dazu später mehr.
Mit etwa 8 € ist er nicht wesentlich teurer als die L297/L298.
Beim Aufbau sehr hilfreich fand ich neben dem Grundschaltplan aus dem Datenblatt die Anleitung von Timo Gruß.
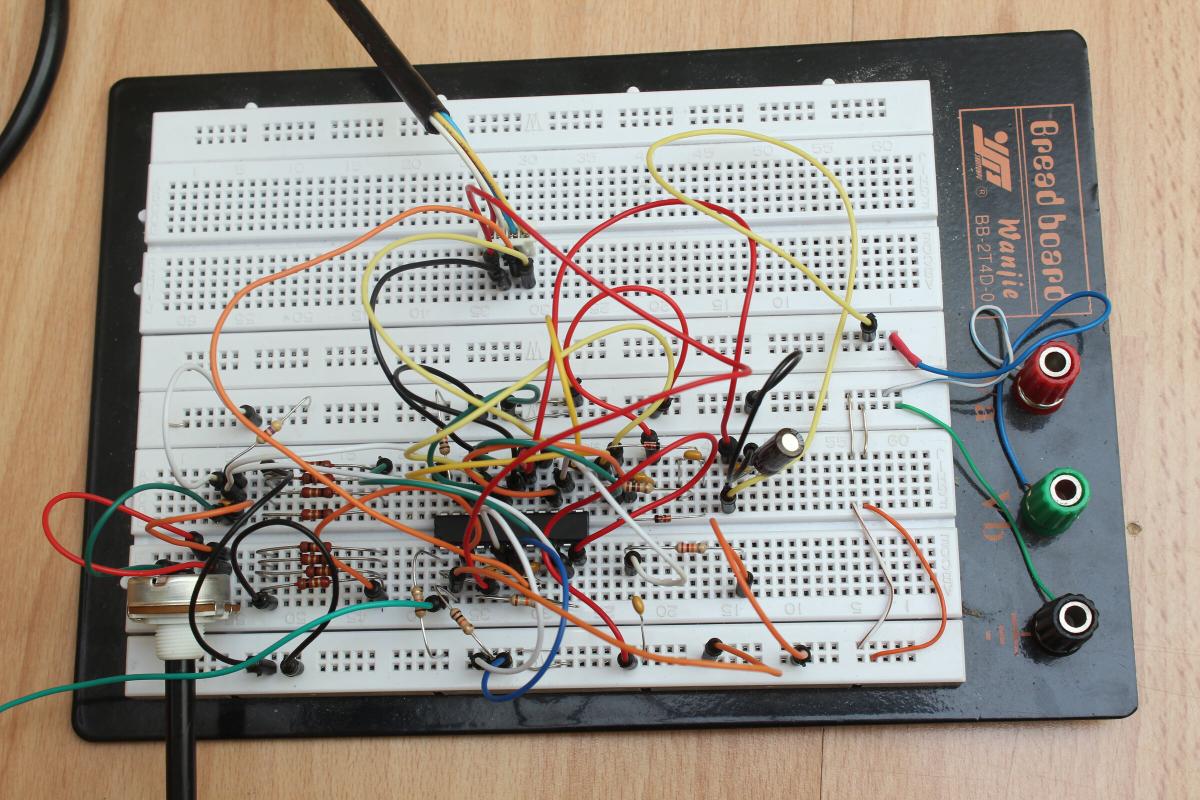
Und los gehts. Da ich die Schaltung selber planen und nachvollziehen wollte, hab ich die Grundschaltung auf einem Breadboard zusammengesteckt.
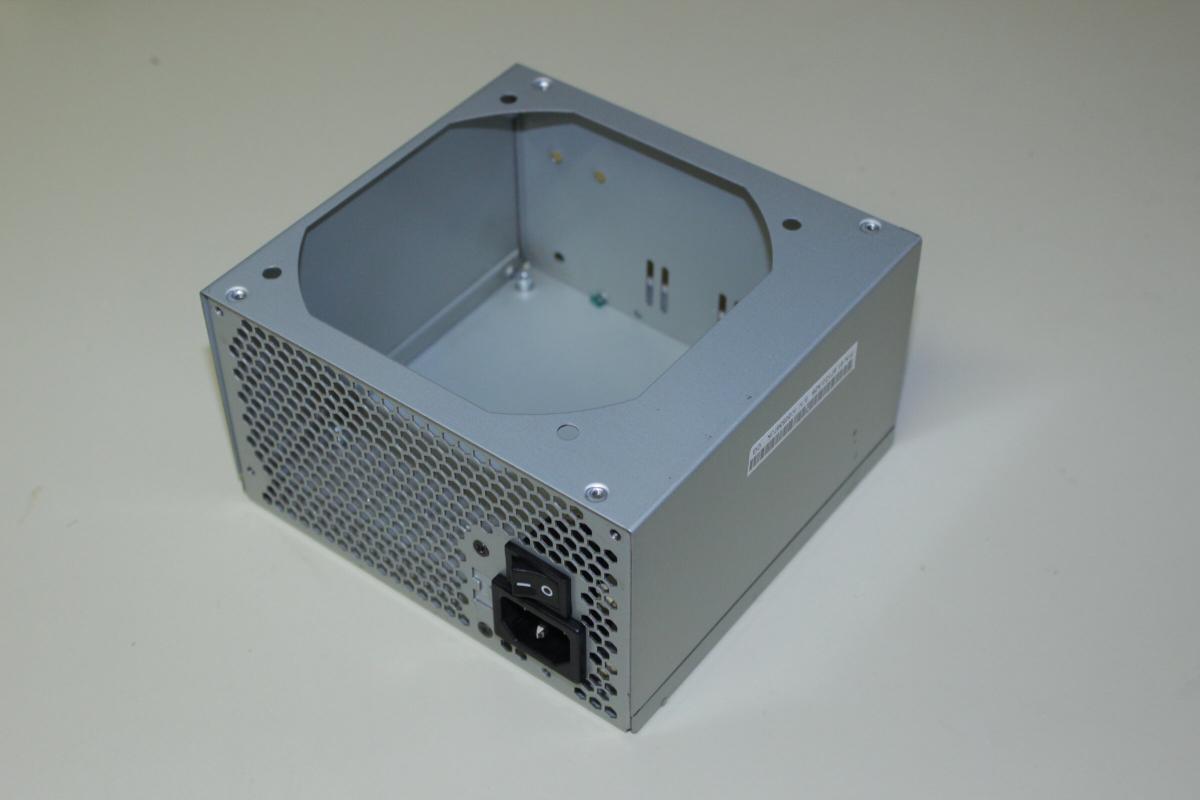
Nachdem die ersten Tests gut verliefen brauchte ich ein Gehäse. Ein PC-Netzteil schien von der Größe passend.
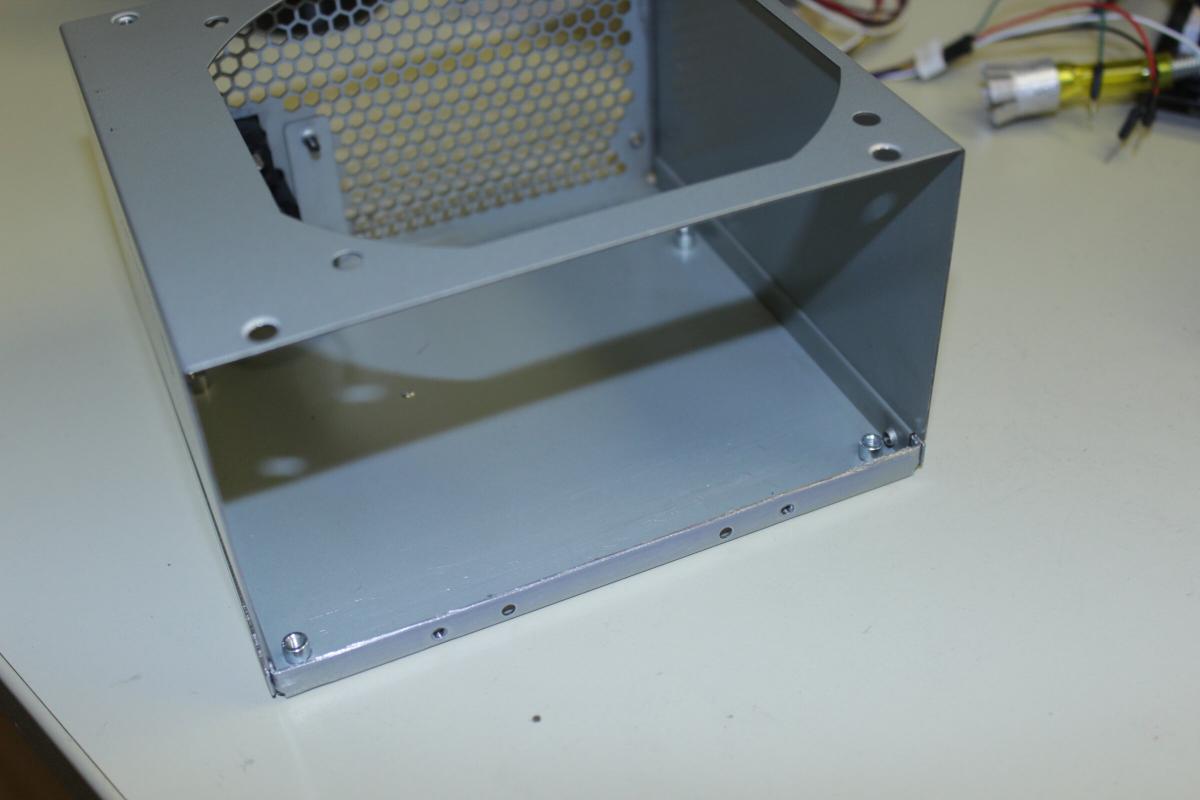
Eine Seite des Metallkastens hab ich entfernt. Da sollen die ganzen Schalter, Potis und Buchsen hin.
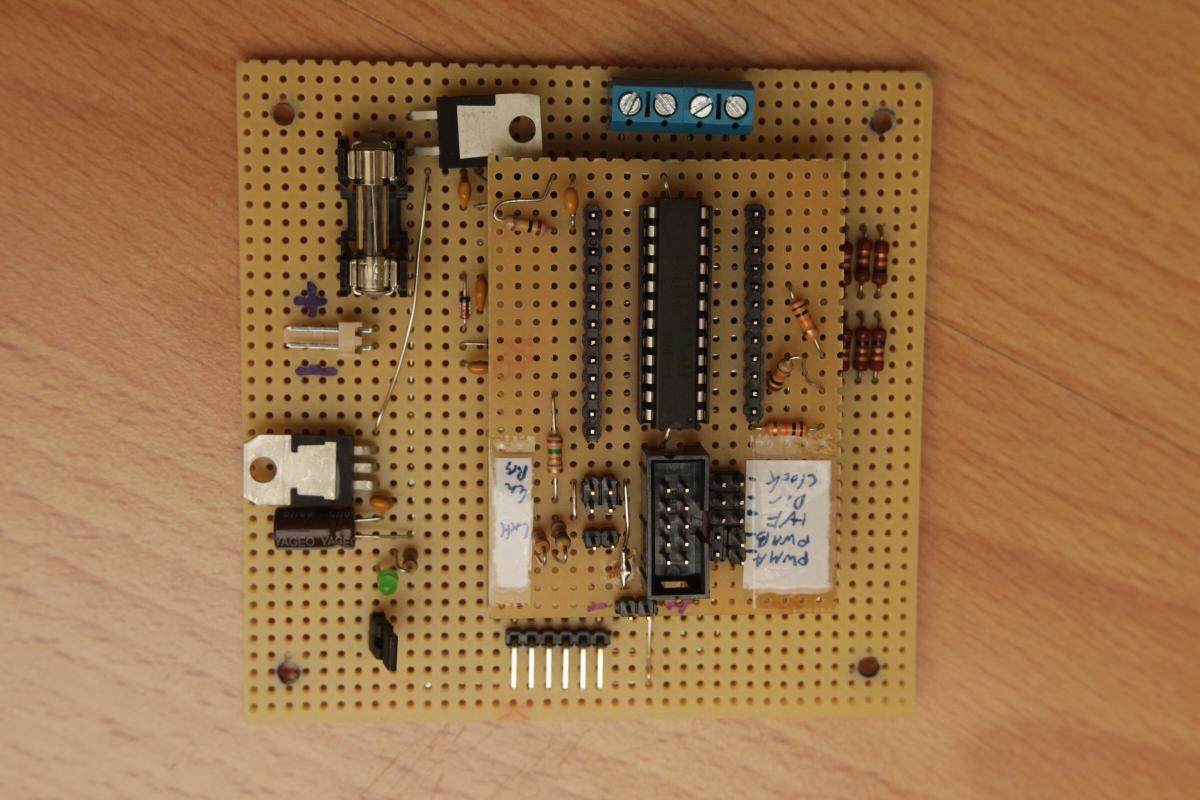
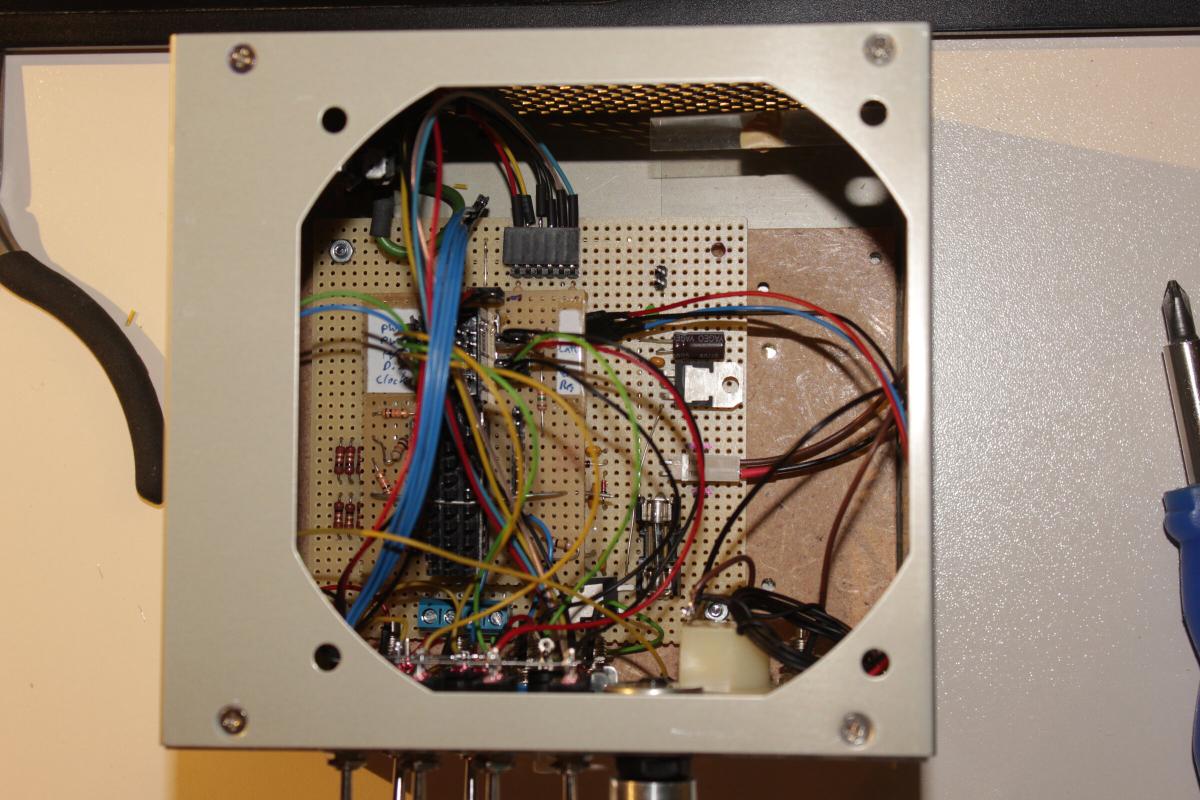
Um später noch die Möglichkeit zu haben Änderungen machen zu können, hab ich die Schaltung auf Lochraster aufgebaut.
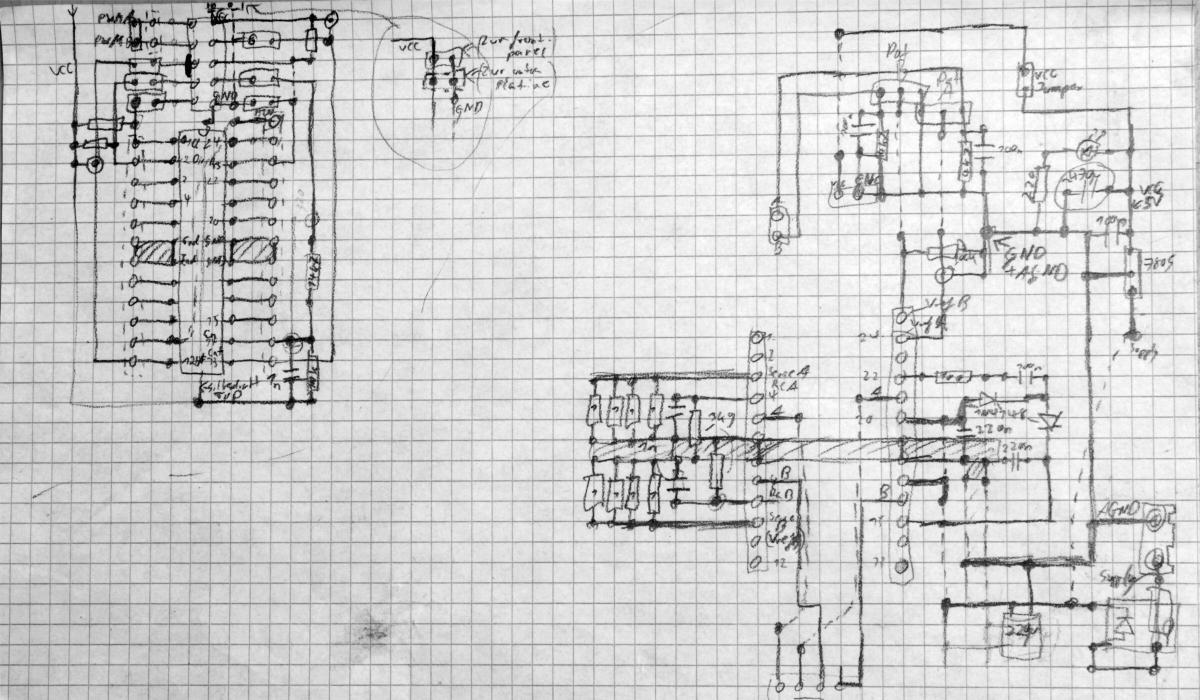
Hier mal der Vollständigkeit halber meine Lochraster-Planungsskizze und der Eagle Schaltplan
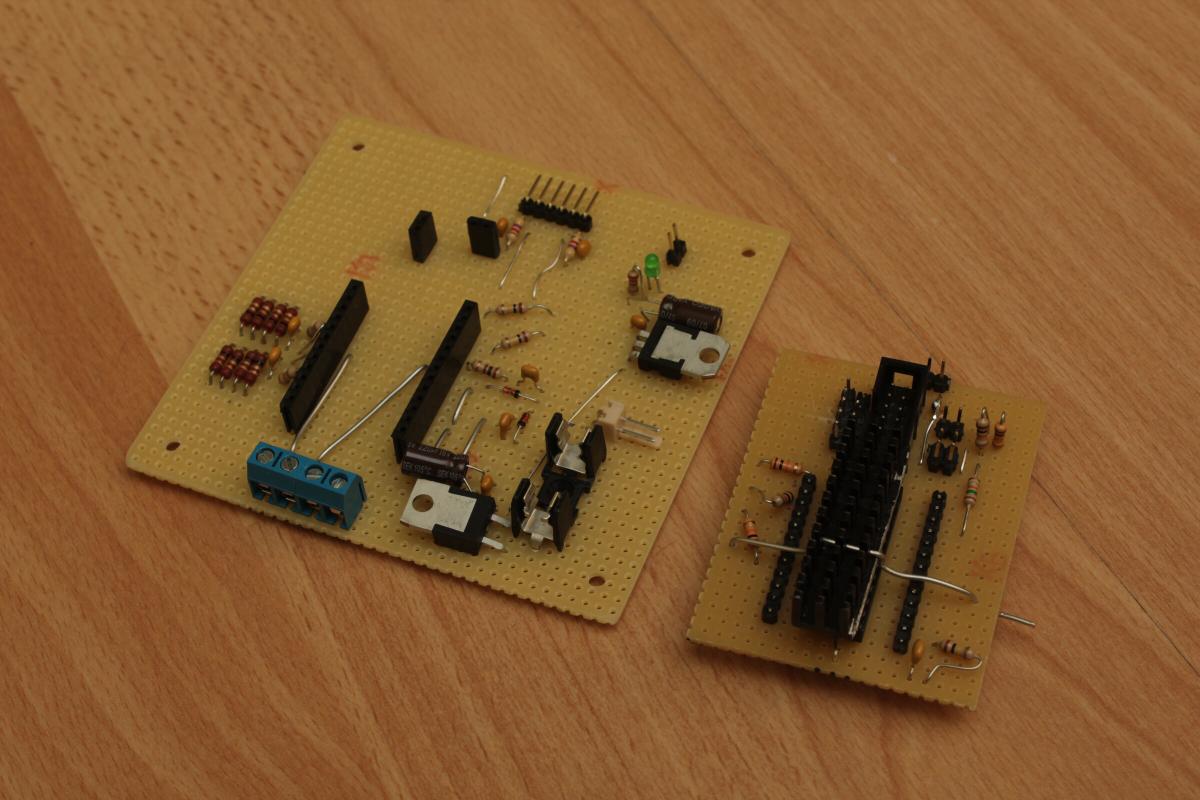
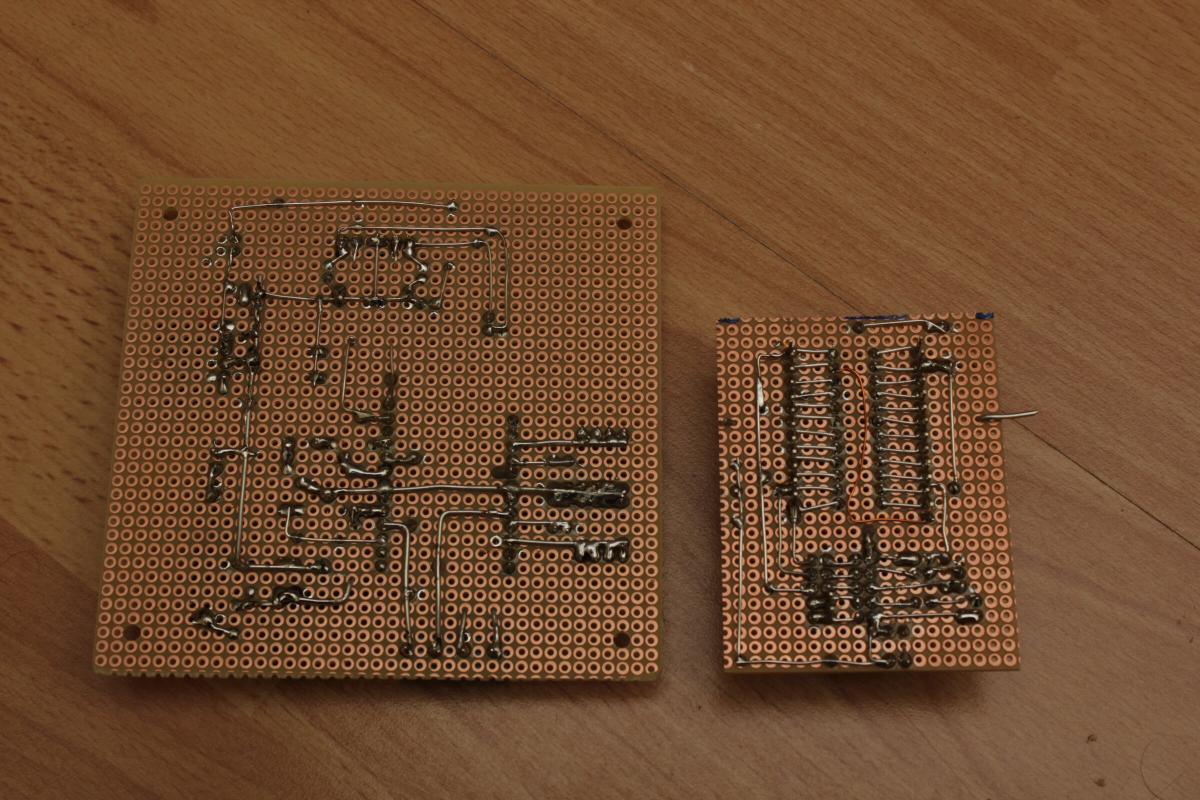
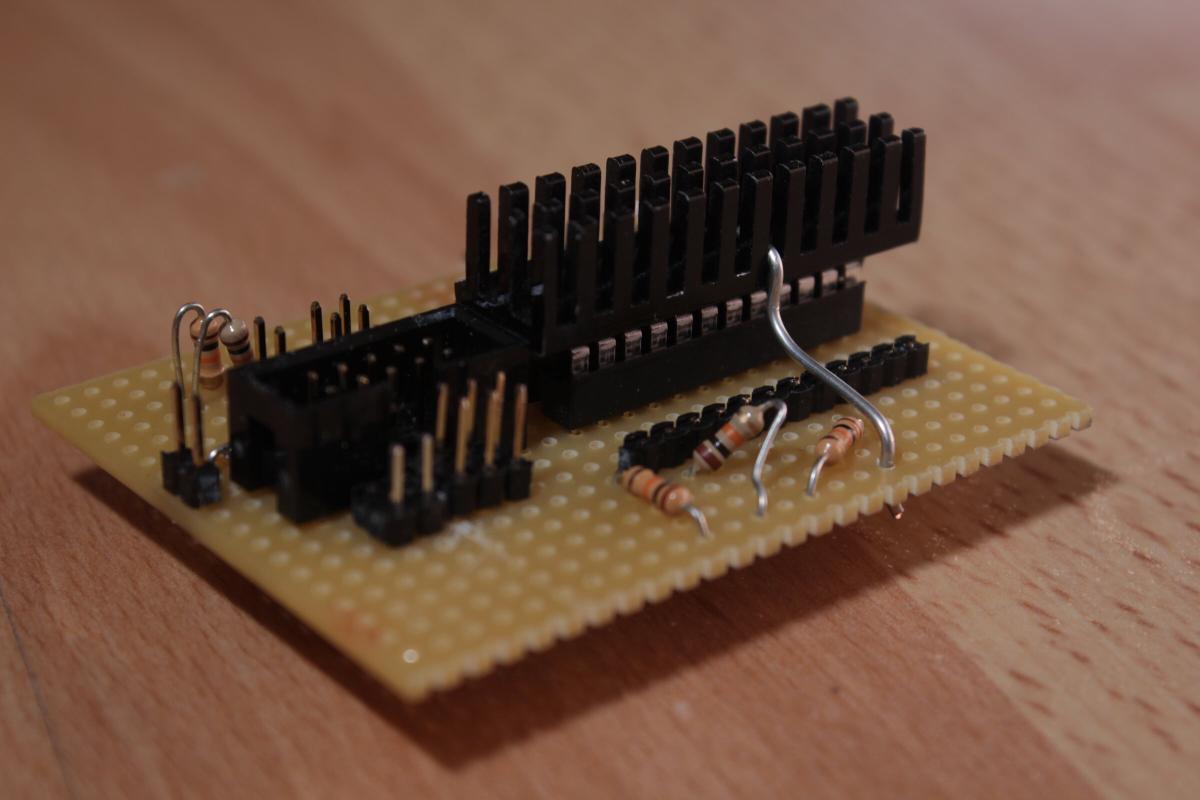
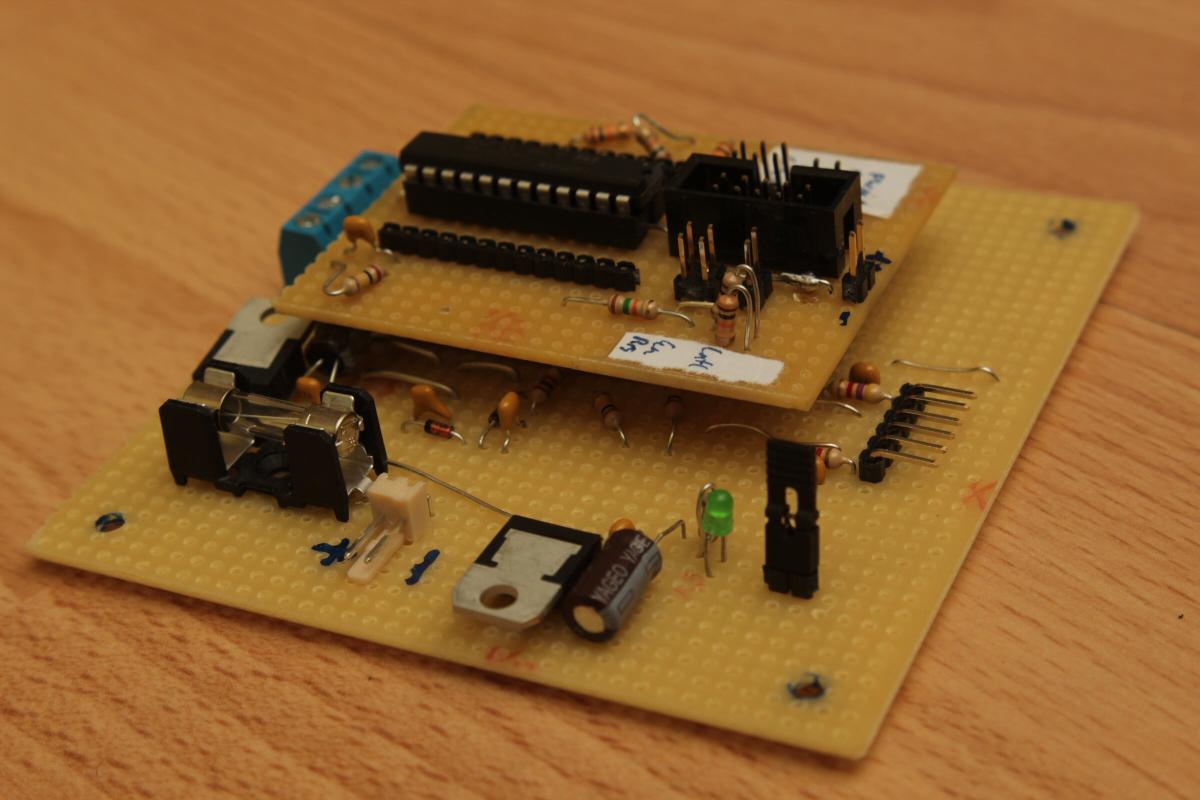
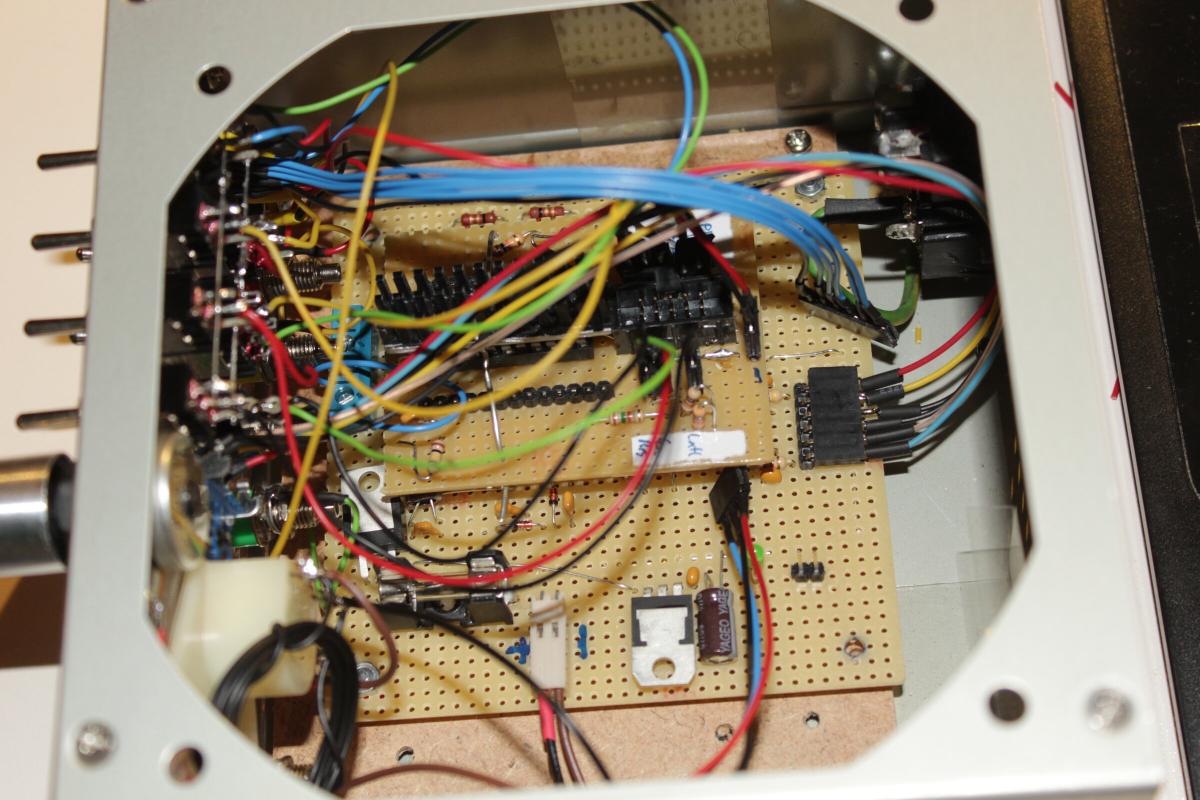
Um es dennoch einigermaßen Ordentlich zu halten, teilte ich die Schaltung auf zwei Platinen auf, die dann aufeinander gesteckt werden.
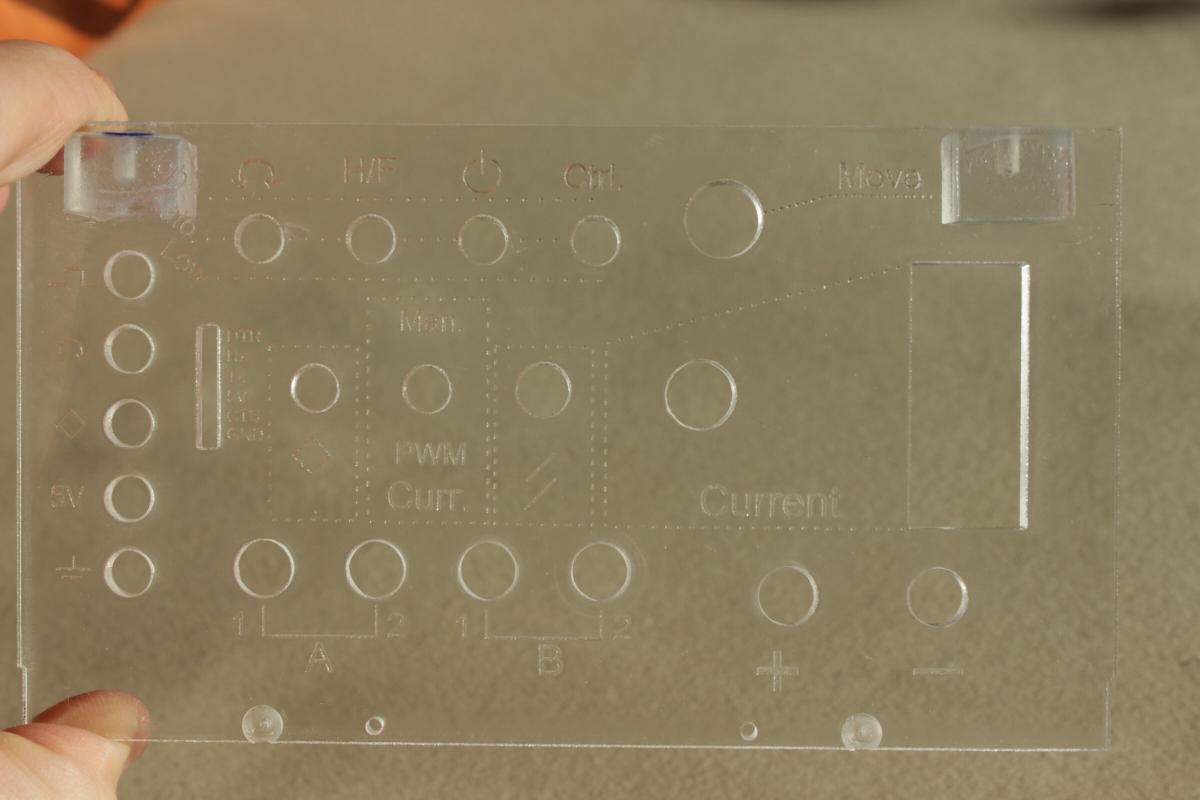
Jetzt noch die Front. Mit einem Laser graviertes und geschnittenes 4mm Acrylglas. Gelaserte SVG: steppercontrolbox_front.svg
{kind=link}
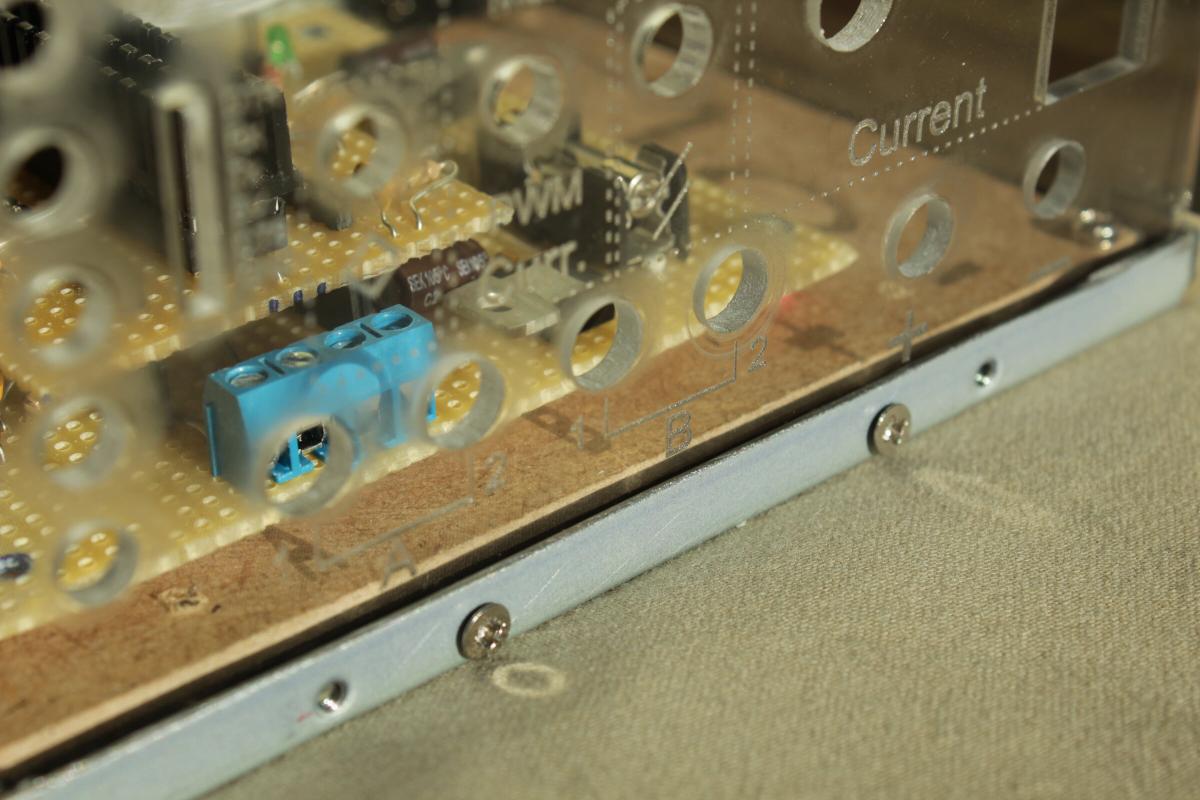

Die Kabel werden beim Zusammenbauen mit Buchsenleisten auf die Platinen gesteckt.
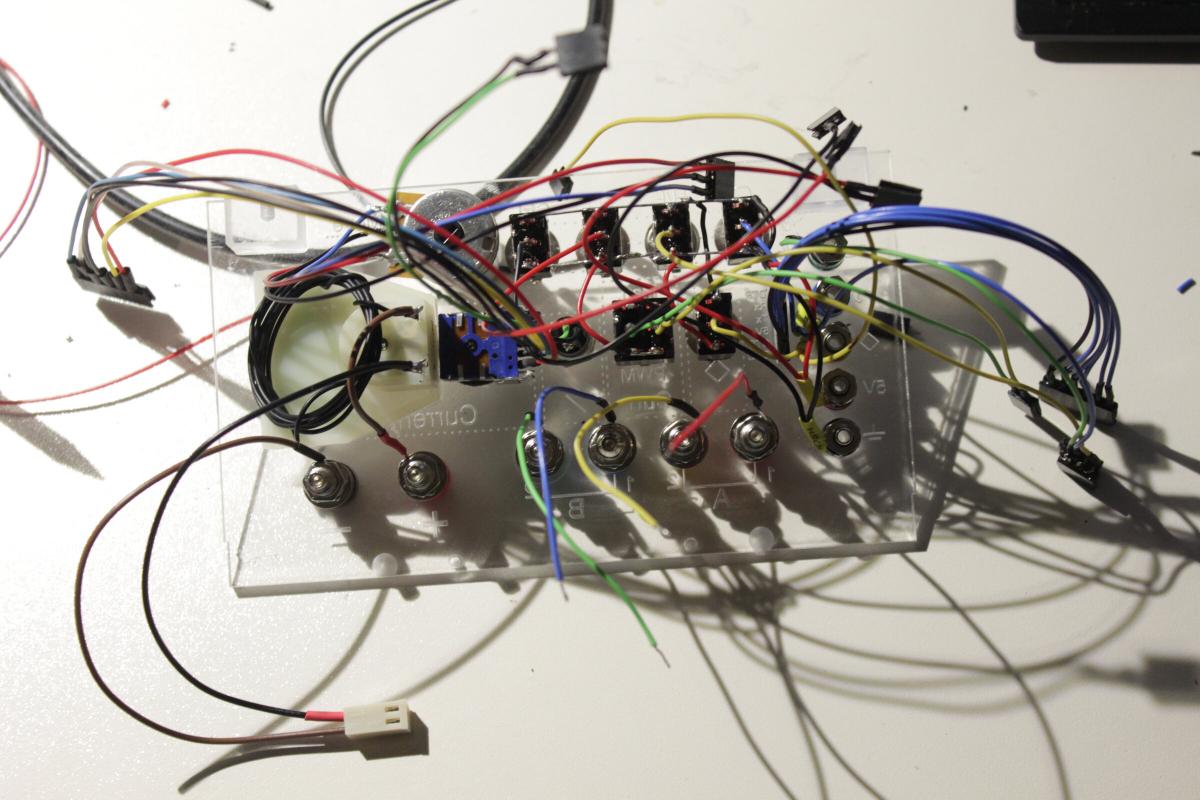
Und das wars vom Grundaufbau auch schon.

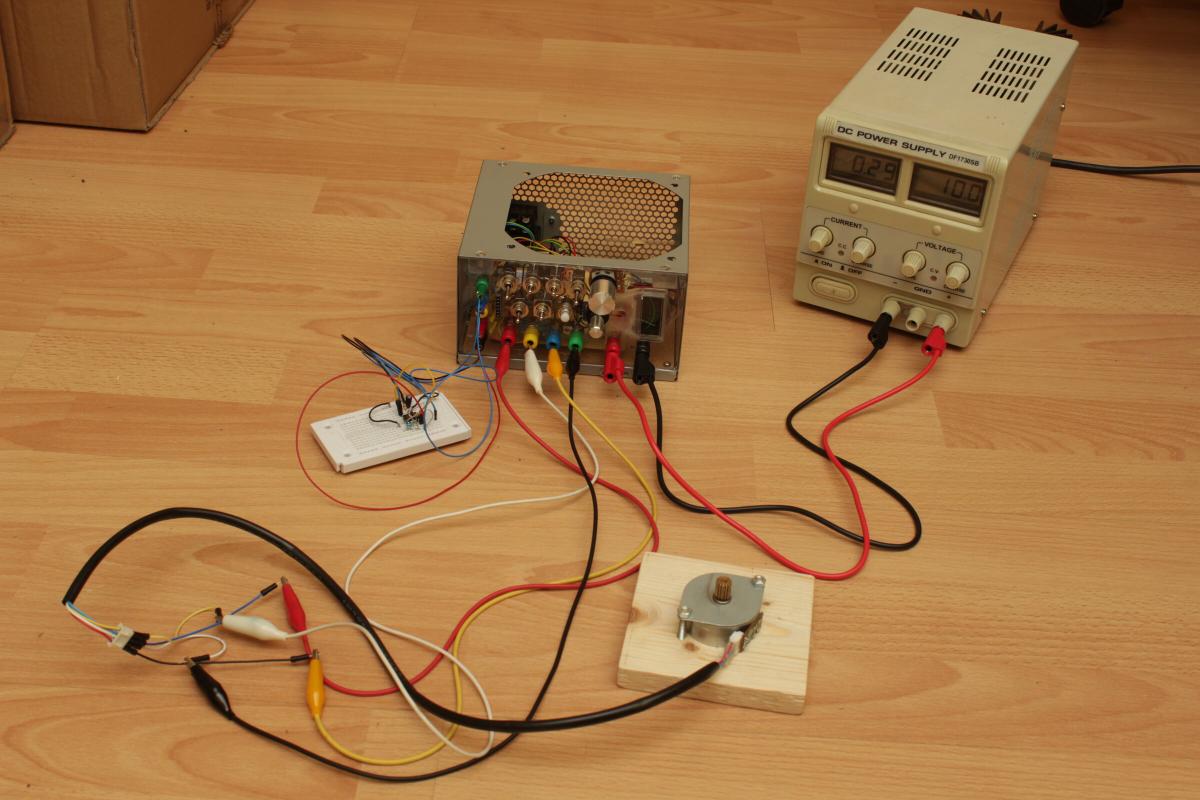
Austesten, oben noch das Lüftergitter rein. Fertig
Um den L6208 Microstepping beizubringen braucht es noch zwei PWM, welche die um 90° phasenverschobenen Sinuskurven auf die Motorstromeingänge bringen.
Dazu hab ich bereits diverse Tests teilweise Erfolgreich mit einem Arduino durchgeführt. Den AVR werde ich dann auch noch in das Gehäse einbauen. Ansprechen soll man ihn dann z.B. Seriell.