Schrittmotor Einleitung
Juni 2010
Inhaltsverzeichnis
Schrittmotoren (engl. Stepper) haben den großen Vorteil, dass sie bis auf
wenige Grad genau drehbar sind. Dafür haben sie aber 4 Adern (bei Bipolaren Schrittmotoren) bzw. 5 oder 6 Adern (bei Unipolaren). Bipolar bedeutet, dass die beiden Spulen umgepolt werden müssen,
Unipolar bedeutet, dass die Spulen eine zusätzliche Mittelanzapfung haben und somit immer nur eine Hälfte der Spule aktiv ist.
Somit sind Unipolare Schrittmotoren leichter anzusteuern, im Endeffekt aber schwächer, da jeweils nur die halbe Spule genutzt wird.
Da ich jetz nicht die ganze Funktionsweise eines Schrittmotors beschreiben will verweise ich mal auf Google.
Bei Pollin hab ich mir dann 2 verschiedene Schrittmotoren bestellt:
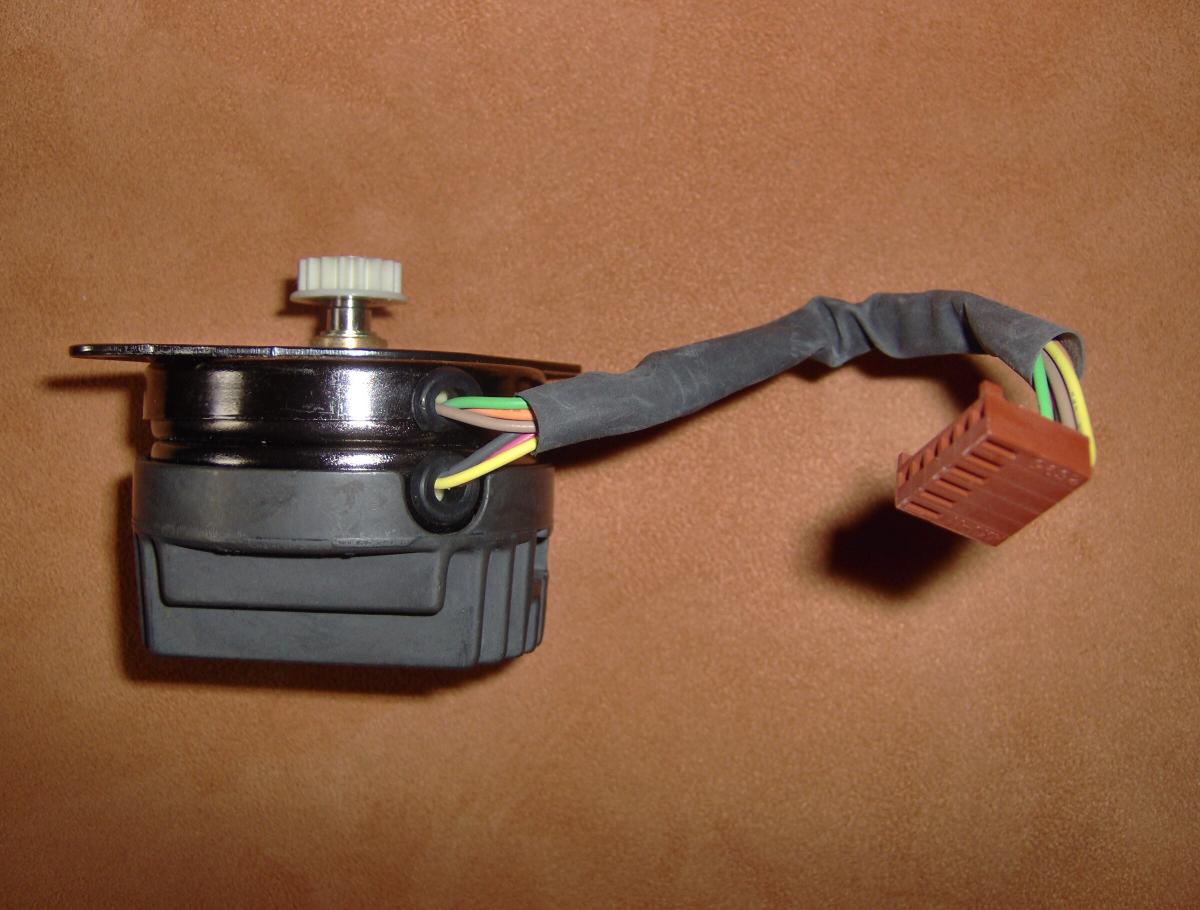
Der Größere IBM hat einen größeren Schrittwinkel von 15° und braucht somit 24 Schritte für eine Umdrehung.
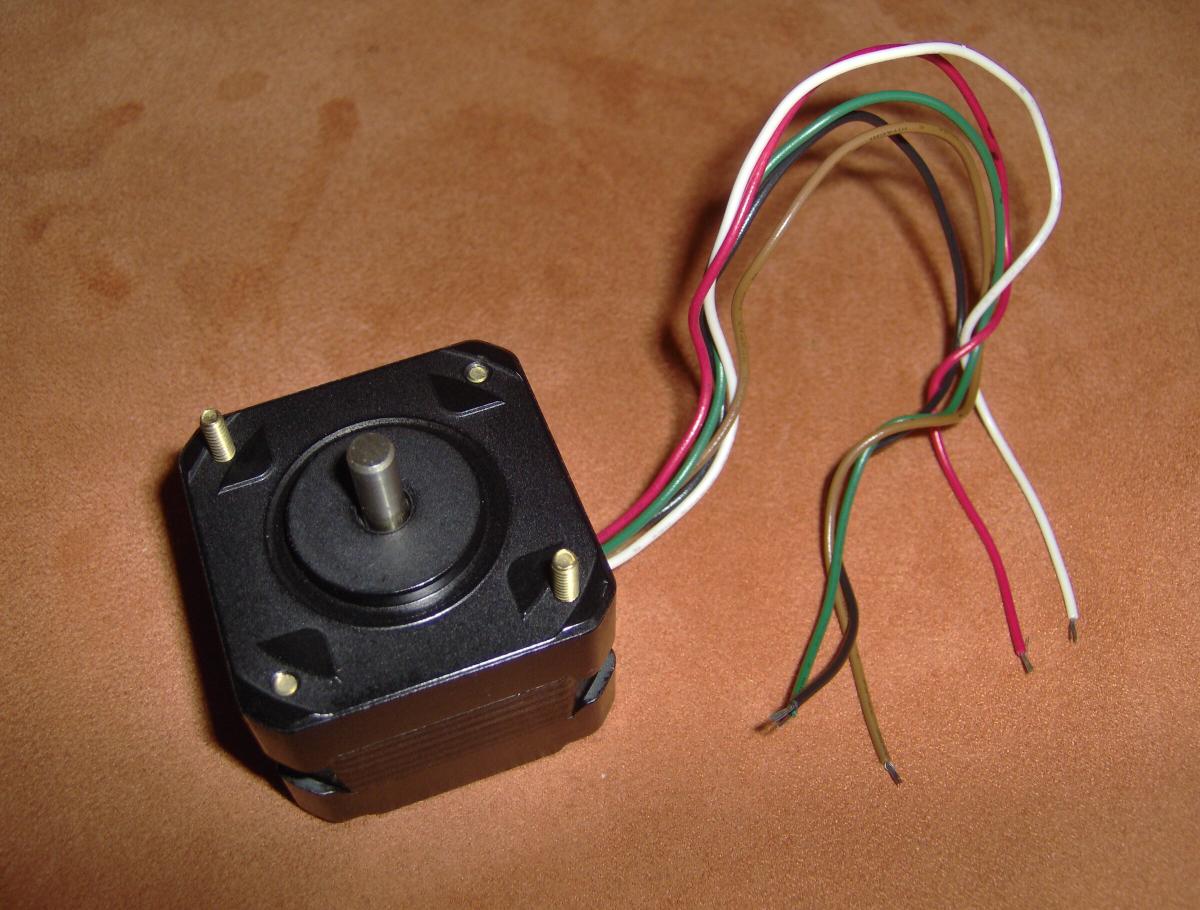
Der kleine Howard schafft eine Umdrehung mit 100 Schritten, also 3,6° Pro Schritt.
IBM 6328861

HOWARD Ind. 1-19-4201

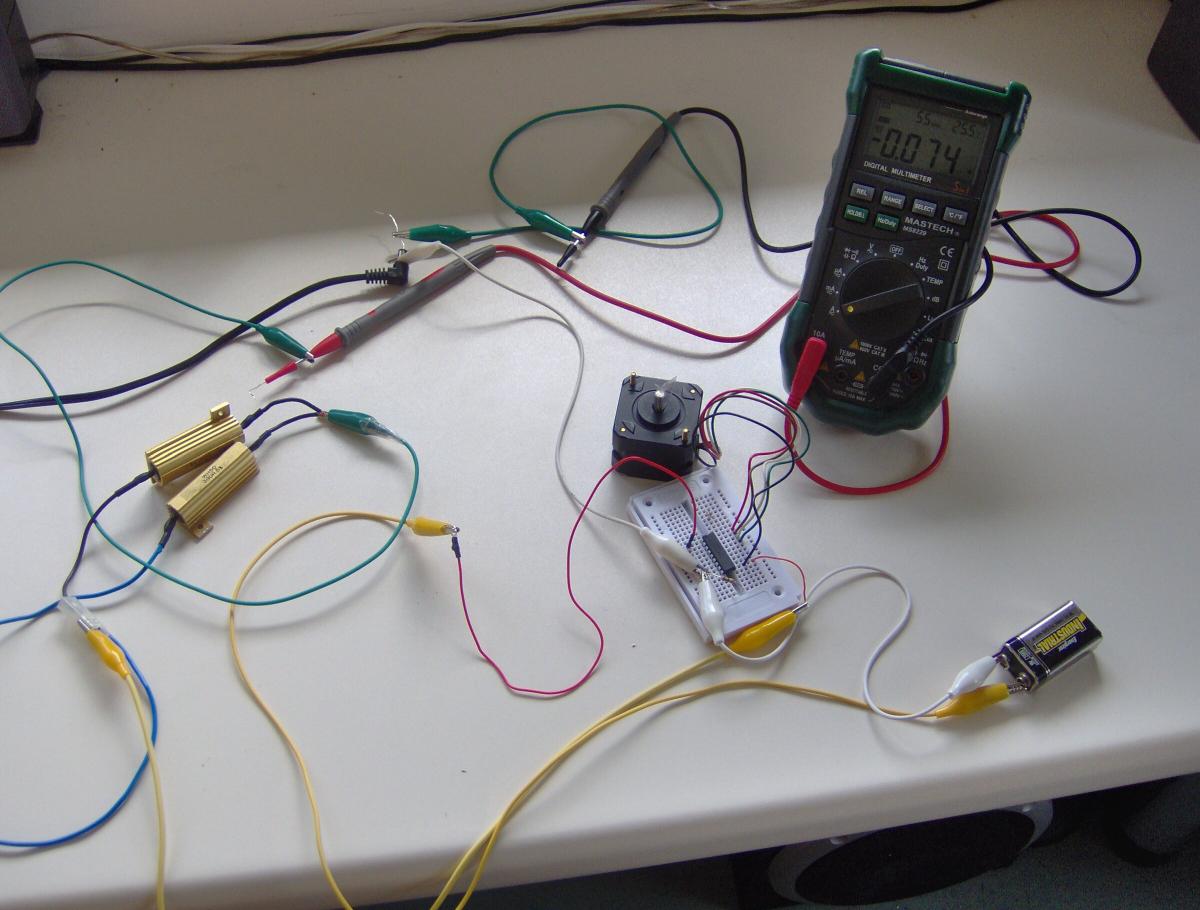
Nachdem man mittels eines Multimeters die Widerstände zwischen den einzelnen
Adern herausgefunden hat, weiß man, wo sich die Mittelanzapfung befindet und welche Adern zu Welcher Spule gehären.
Zwischen einem Ende einer Spule und er Mittelanzapfung sollte sich ein relativ geringer Widerstand befinden.
Zwischen den Enden einer Spule ein entsprechend höherer.
Bei Gemeinsamer Mittelanzapfung (5 Adern) kann man das nicht so genau sagen, da der Widerstand von einem Spulenende zu jedem anderen gleich groß ist.
Meist hilft auch ein Blick in das Datenblatt (bei diesen Motoren hab ich leider keines gefunden).
Zum Steuern des schrittmotors benötigt man noch einen Treiber, also einen Baustein der die Schritte des Motors der Reihe nach, in einer bestimmten Geschwindigkeit durchgeht.
Dafür verwende ich den LPT-Ausgang eines PC’s oder einen µC wie z.b. den Atmega8.
Damit der Motor auch genug Strom bekommt (etwa 0,1 - 1A bei kleineren Schrittmotoren) verwende ich einen Darlington IC, den ULN2803.
Diesen Versorgt man mit der für den Schrittmotor benötigen Spannung (bei mir 24 Volt).
Auf einer Seite hat man 8 Ausgänge wo man dann 2 Schrittmotoren anschließen kann (je 4 Ausgänge).
Die Mittelanzapfung des Schrittmotors verbindet man mit der Positiven Spannung.
Auf der anderen Seite kann man mit der Ausganspannung des LPT-Ports oder eines µC die entsprechenden Ausgänge schalten.
Der ULN2803 verträgt nur etwa 500mA bei 50V (Laut Datenblatt), also immer drauf achten wie warm der wird.
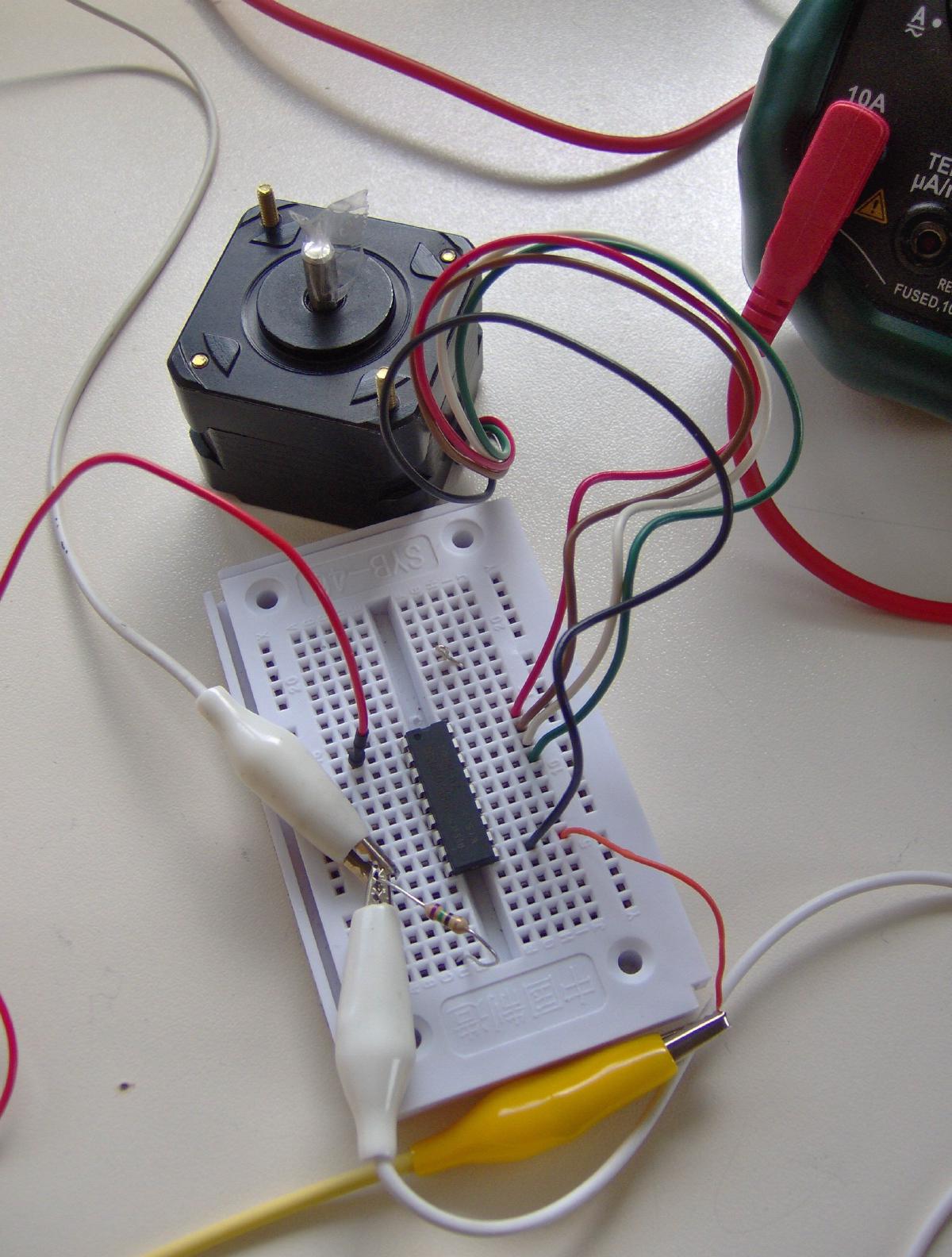
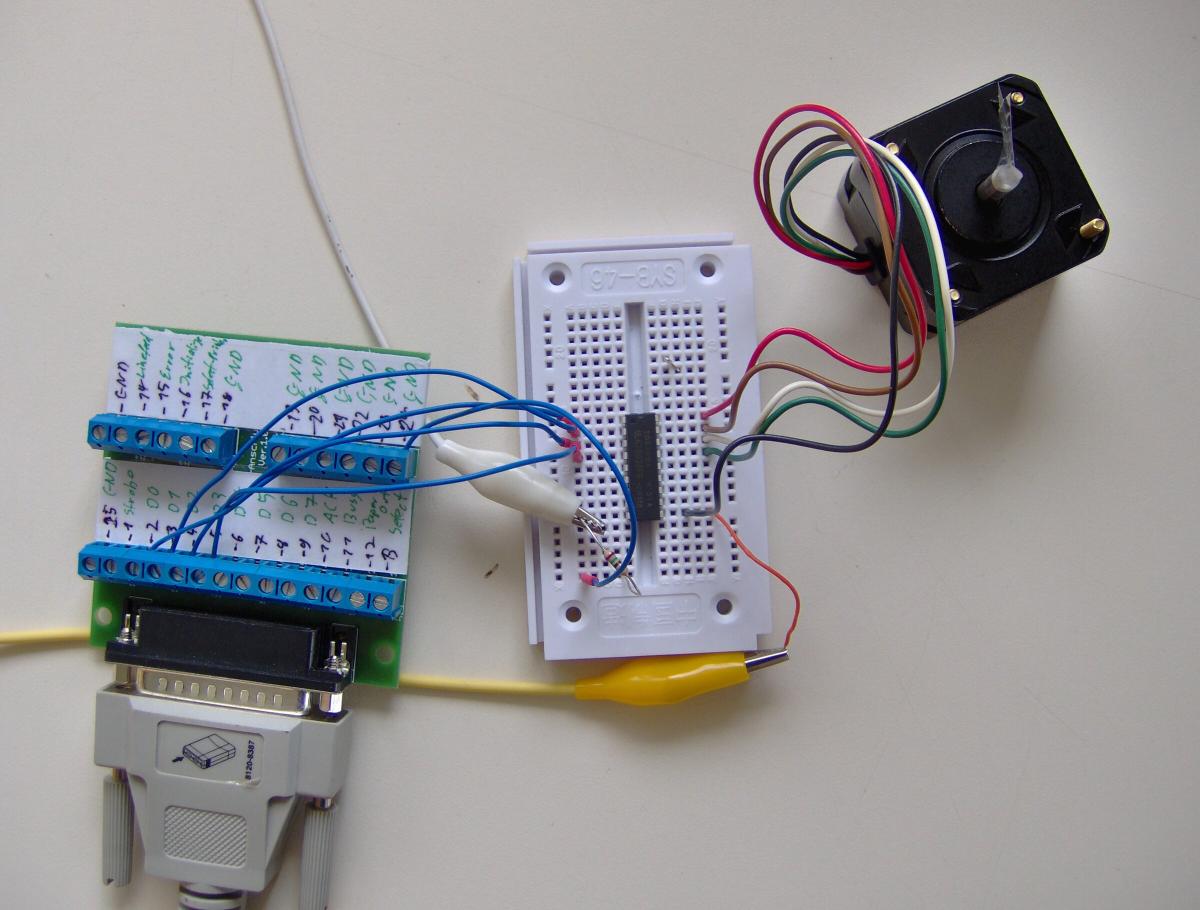
Hier mal der Testaufbau mit dem Howard
Rechts die Ausgänge des ULN2803 und links die Eingänge
An dem kleinen orangenen Draht unten rechts am ULN liegen die +24V an.
Davor ist ein Hochleistungswiderstand geschaltet, damit nicht mehr als 500mA durch den ULN jagen.
Ausrechnen kann man den Widerstand ganz einfach mit der Formel: R=U/I, also bei mir: r=24V/0,5A= 48 Ohm
Der Widerstand sollte für mindestens U*I Watt (12Watt) ausgelegt sein.
Die Schrittreihenfolge kann man einfach durch ausprobieren rausfinden.
Wenn der Motor sich Schritt für Schritt bewegen lässt kann man als nächstes z.b. einen µC anschließen.
Ich hab mich für den Druckerport entschieden, da ich damit schon öfters gearbeitet hab und auch schneller Programme schreiben kann und diese nicht jedes mal wie bei einem µC erst brennen muss.
Hier mal der Testaufbau mit dem LPT-Port
Ein Programm für den Druckerport kann man z.b. mit Profan schreiben.
Mit dem Programm kann man den Schrittmotor ganz einfach mit einer ganz genau festlegbaren Geschwindigkeit drehen.
Dabei sollte man darauf achten, ihn nicht zu schnell zu drehen, da er bei zu geringer Stärke gerne mal ein paar Schritte überspringt und somit ungenau wird.
Hier noch zum Schluss ein kleines Video
Das wars auch eigendlich schon. Jetzt kann man sich überlegen wozu man das dann braucht.
Ein Verwendungszweck währe z.B. eine CNC.
Hier gehts weiter zur Ansteuerung von Schrittmotoren mithilfte des L297 und L298