Project start: July 2012
Tricopter - Aufbau

Nachdem der Tricopter
Prototyp fliegen konnte und ich ihn etwas später dann in einen Baum gesteuert hab wurde es Zeit mich von dem Prototyp zu verabschieden, da dieser den Sturz aus etwa 5 Metern Höhe nicht überlebt hat.
Zum Glück liefen alle Motoren, ESC's und sogar der KKMulticontroller noch. Lediglich die Centerplate aus Lochrasterplatine und der onboard Camcorder bekamen einiges ab.
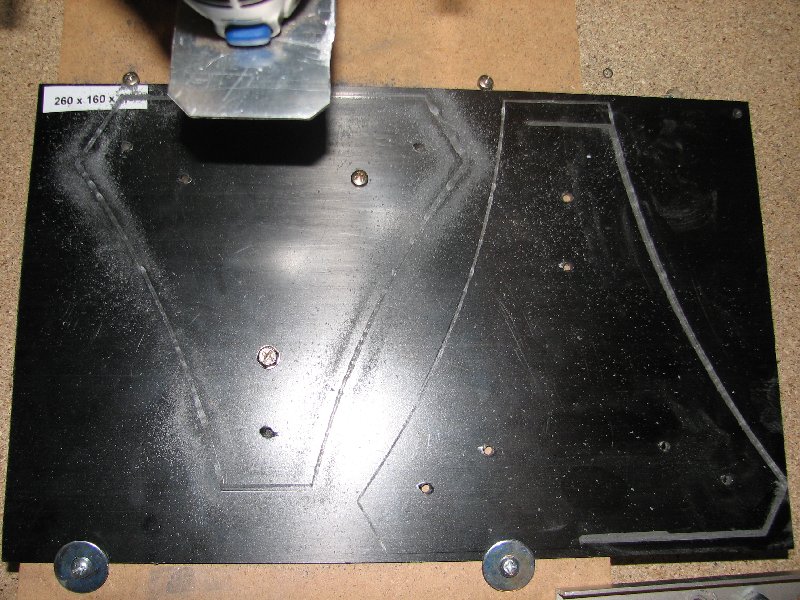
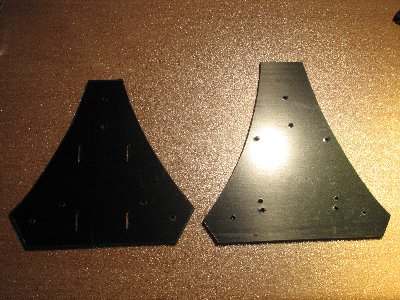
Als Material für die Centerplate kaufte ich mir bei Ebay für etwa 7 € eine 260 x 160 x 2,3mm Kohlefaser (CFK) Platte. Diese sind leicht und extrem stabil und werden oft für Modelbauzwecke verwendet.
Das Design sollte einerseits optisch ansprechend, aber vorallem praktisch sein. Dazu gehört für mich auch die Möglichkeit, die vorderen Arme einklappen zu können.
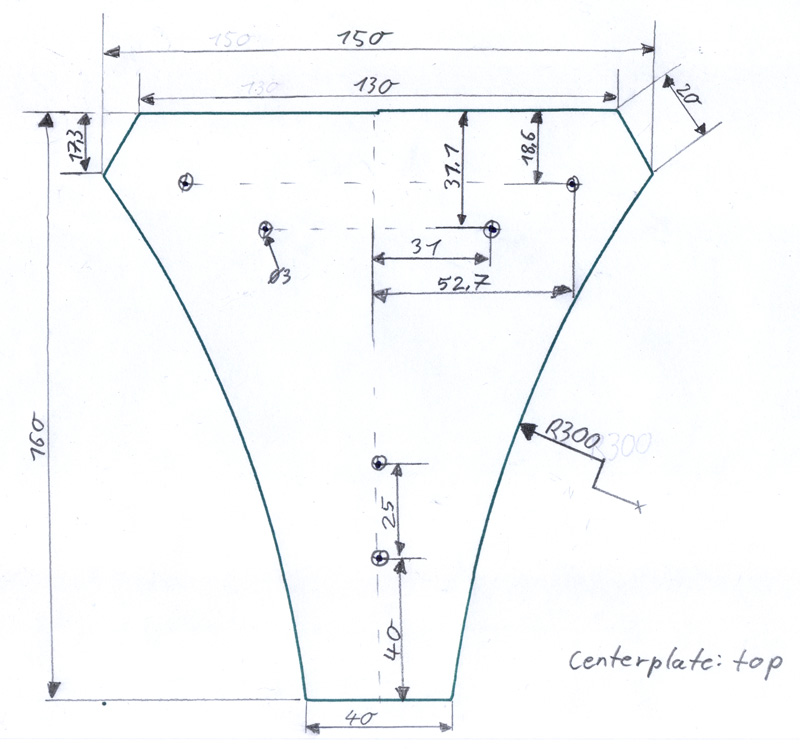
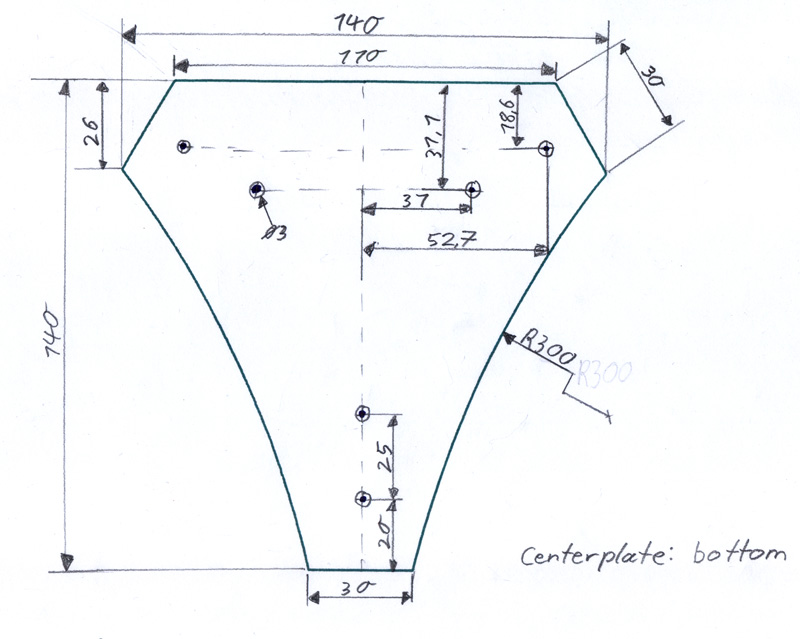
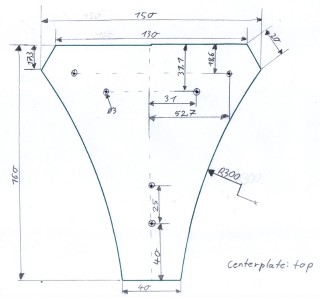
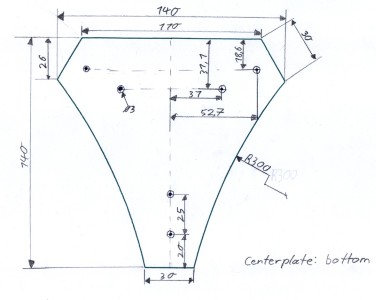
Hier meine Planung der oberen und unteren Centerplate
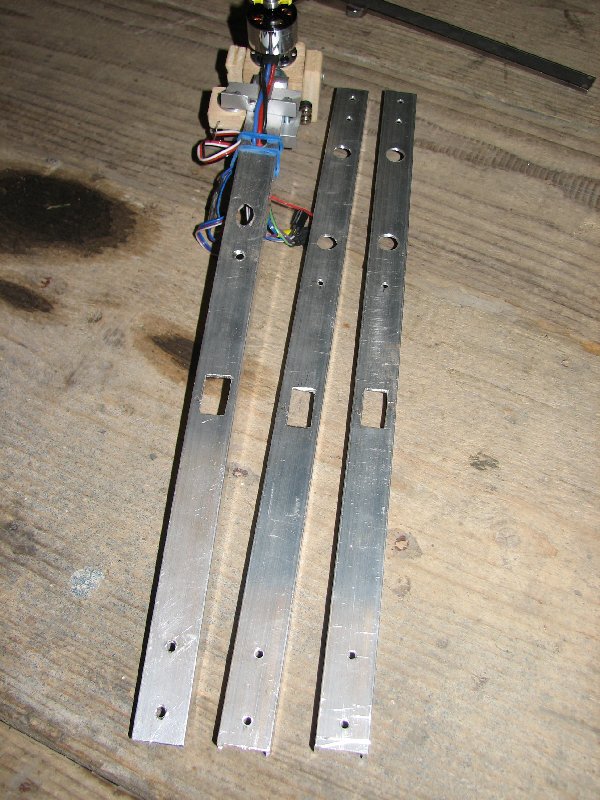
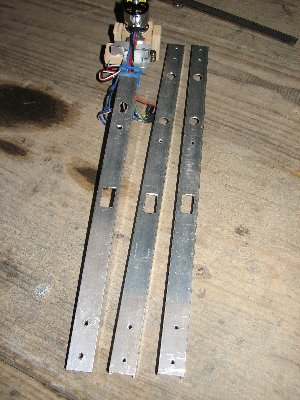
Den hinteren Arm des Prototypen hab ich übernommen, die vorderen beiden musste ich neu bauen, da ich die Motoren direkt auf den Aluprofilen anschrauben wollte.
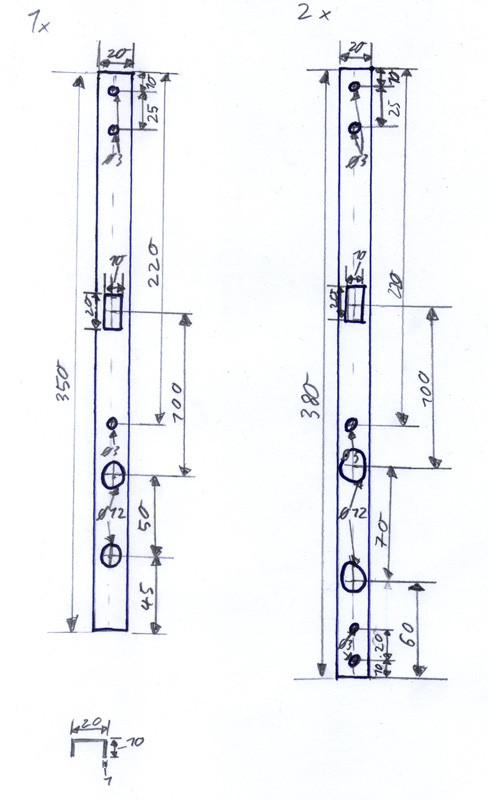
Hier meine Zeichnung der Arme mit allen Löchern für Kabeldurchführungen und Schrauben
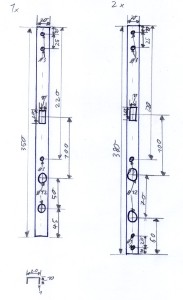
Die drei Zeichnungen gibts
hier als PDF's.
Als dann die CFK-Platte da war, sollte die Zeichnung realität werden

Da zu dem Zeitpunkt meine
CNC bereits funktionsfähig war wollte ich sie auch dafür verwenden.
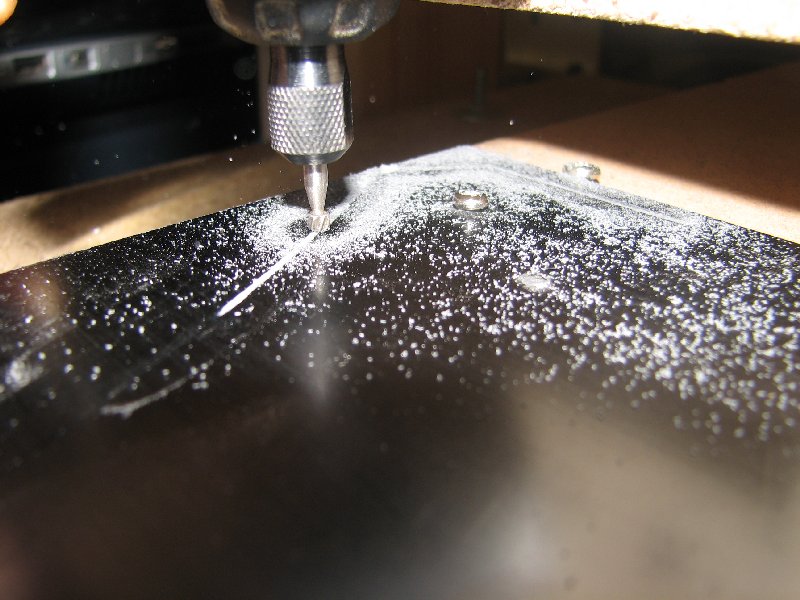
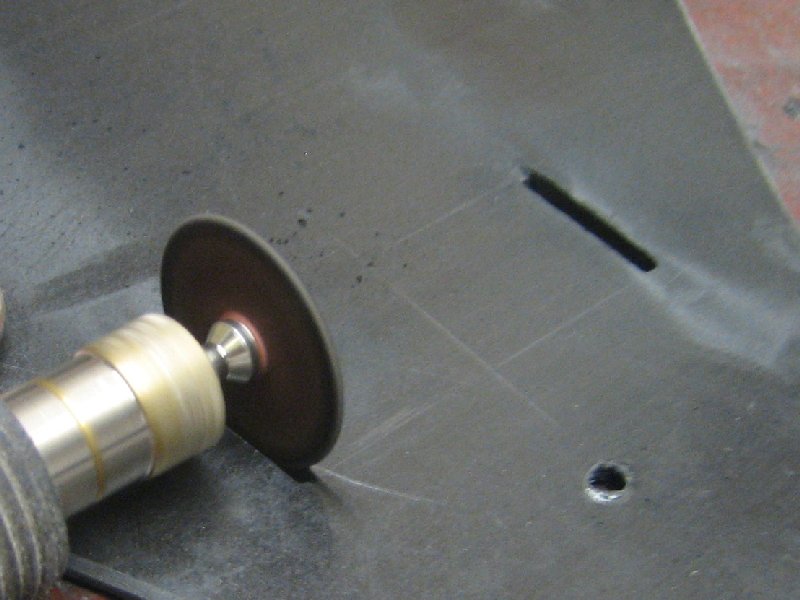
Zuerst hab ich die Löcher gebohrt, anschließend die Kontur gefräst. Da der Bohrer aus einem billig Kleinbohrmaschienen-Set ist, war er etwas zu stumpf, sodass ich die Löcher nur leicht anbohren konnte. Auch das Fräsen wurde mehr zum Gravieren, da ich noch keinen passenden Fräsaufsatz hatte.
Trotzdem immer noch besser als komplett per Hand.


Den G-Code für die Bohrungen und die Kontur hab ich mit dem kostenlosen Programm
G-Simple generiert.
Wer sich für die G-Simple Dateien interessiert kann sie
hier als Zip Runterladen.


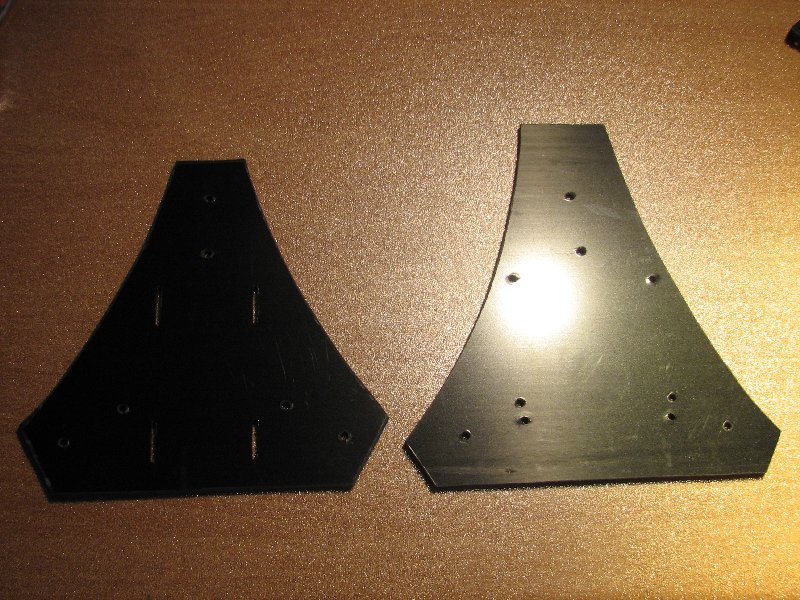
Nachdem die CNC ihre Arbeit verrichtet hatte konnte ich den Rest mit einer Stichsäge machen.
Zudem fehlten noch ein paar Löcher für die Controllerplatine


Dann waren die Arme an der Reihe; die kleinen Löcher sind zur Befestigung, die größeren als Kabeldurchführung gedacht.

Dann noch schnell vier Schlitze in die untere Platte zum Befestigen des LiPo's

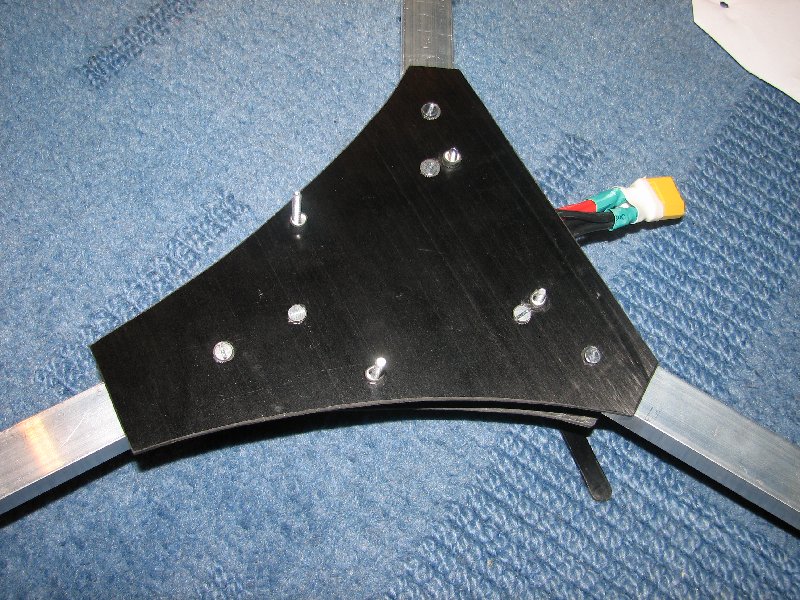
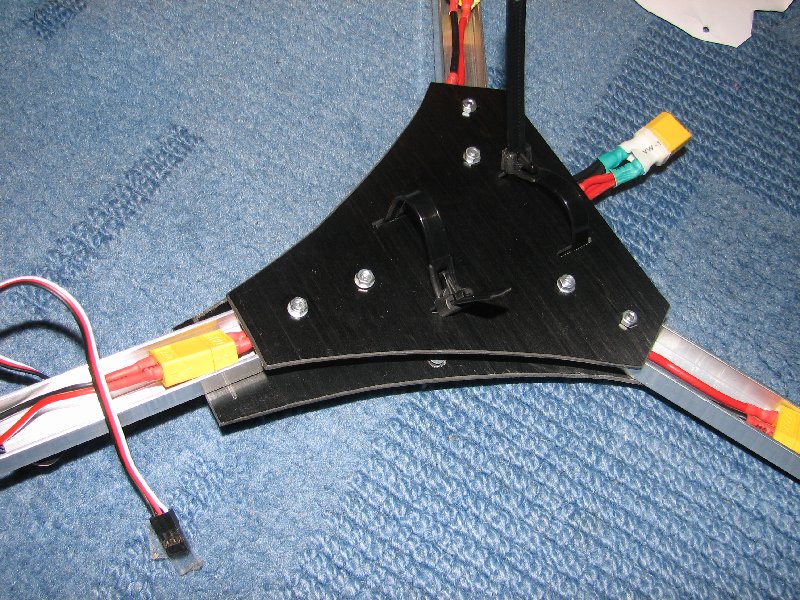
Dann war es soweit, die Arme konnten mit den Centerplates verschraubt werden.
Die 12V Stromkabel sind praktischerweise zwischen den beiden CFK-Platten versteckt.


Auch die Stecker der ESC's verschwinden in den Aluprofilen.
Entfernt man die beiden äußeren Schrauben der vorderen Arme lassen diese sich nach hinten umklappen.



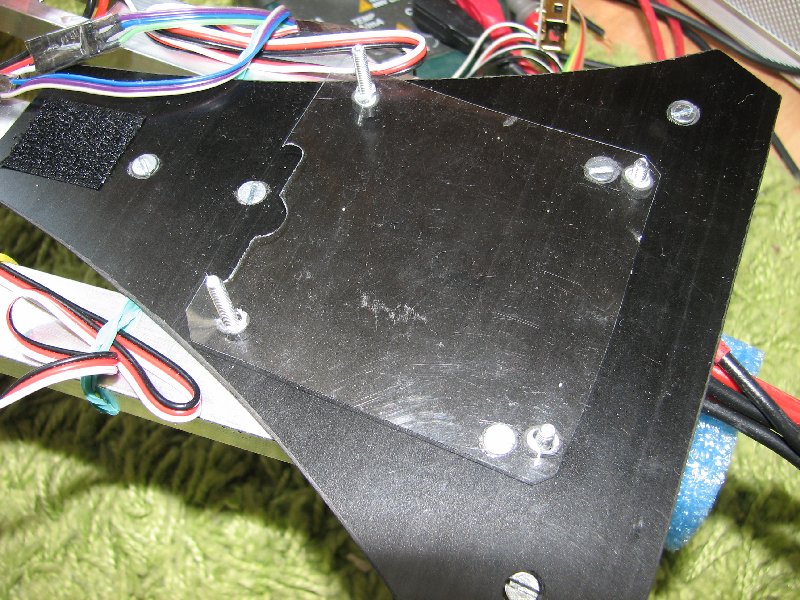
Dummerweise ist CFK Stromleitend, was eine Isolation zwischen Platine und Centerplate notwendig machte.


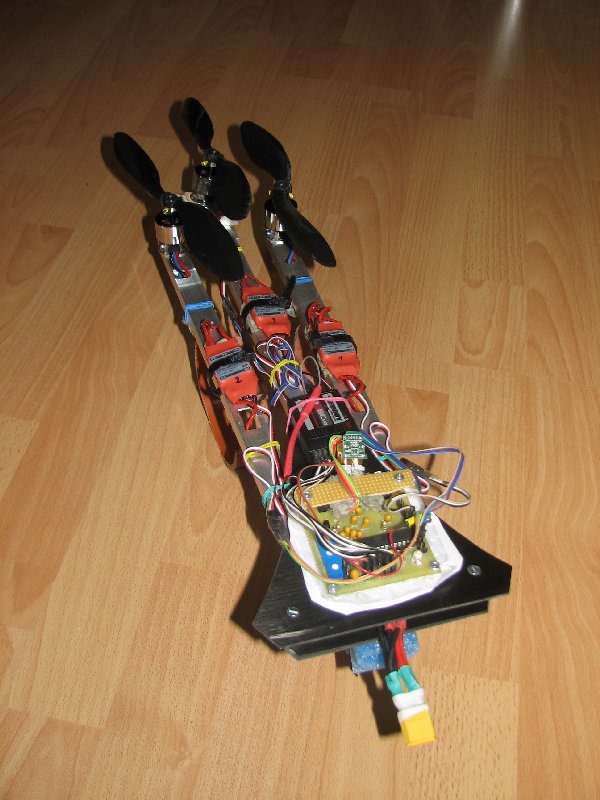
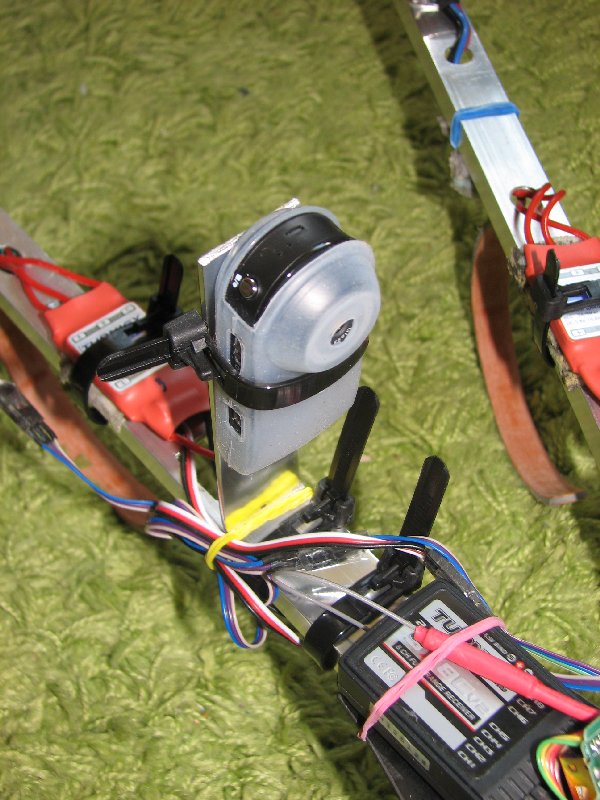
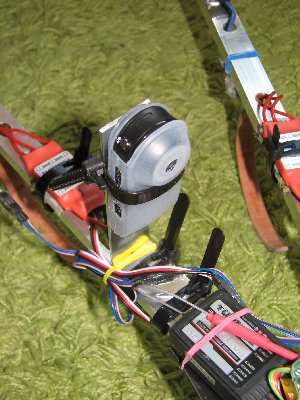
Für folgende Flüge hab ich mir eine kleine Kamera (
PMDV 85) von Pollin für 15 € geholt und mit etwas Kabelbinder und einem Aluwinkel am hinteren Arm befestigt.
Nach erneuter Einstellung und Trimmung fliegt sich der Copter nun besser als zuvor.


Ebenfalls bei Pollin bestellt, einen Werkzeug-Alukoffer. In ihm lassen sich alle wichtigen Sachen verstauen.


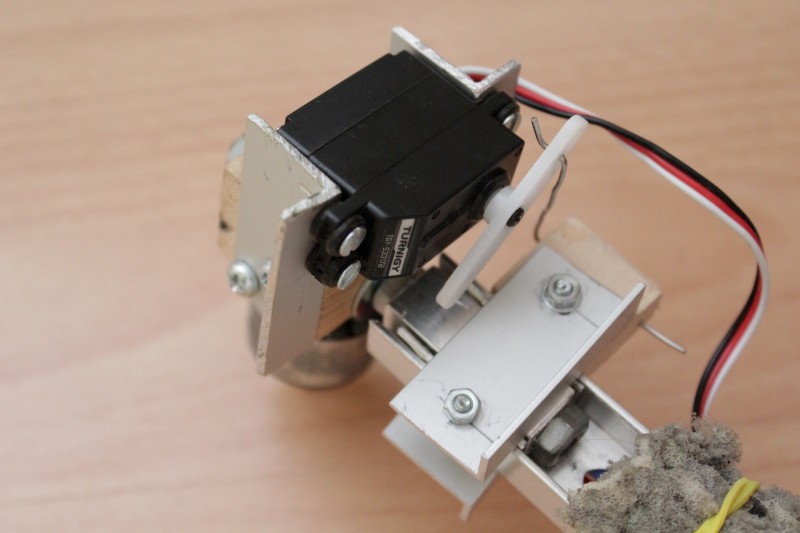
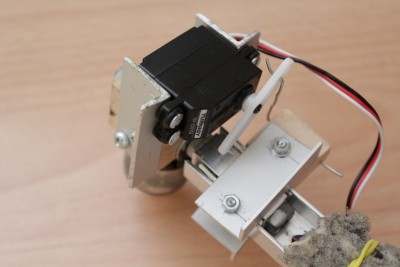
Da der Yaw Mechanismus noch vom Prototyp komplett aus Holzklötzen bestand hab ich diesen teils durch Aluwinkel ersetzt, wodurch der Servo nun etwas fester sitzt.

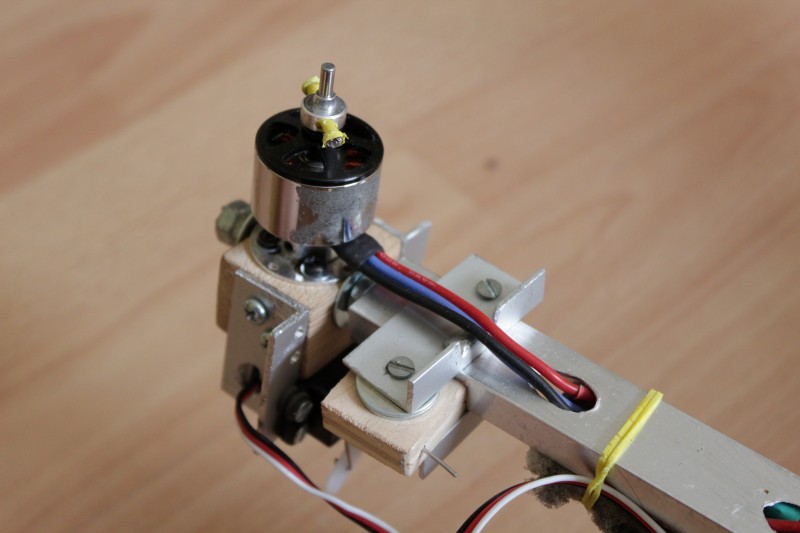
Mit der Zeit nutzen sich die O-Ringe der Propsaver ab und bekommen kleine Risse. Bevor mir in 5m Höhe aber einer durchreißt und ein Propeller abhanden kommt wollte ich die O-Ringe austauschen.
Leider ist es nicht allzu leicht passende O-Ringe zu bekommen, die auch noch stark genug sind. In einem Forum las ich dann, dass Ringe aus alten Fahrradschläuchen ein guter Ersatz sind.
Also beim nächsten Fahrradladen gefragt und dort zwei Fahrradschläuche aus dem Müll mitgenommen (Günstiger gehts wohl kaum).
Nachtrag: Nachdem mir im Flug einer der Schläuche dann doch gerissen ist bin ich auf Propspinner umgestiegen.


Davon dann mehrere Ringe abgeschnitten und einen doppelt auf den Propsaver gesetzt.


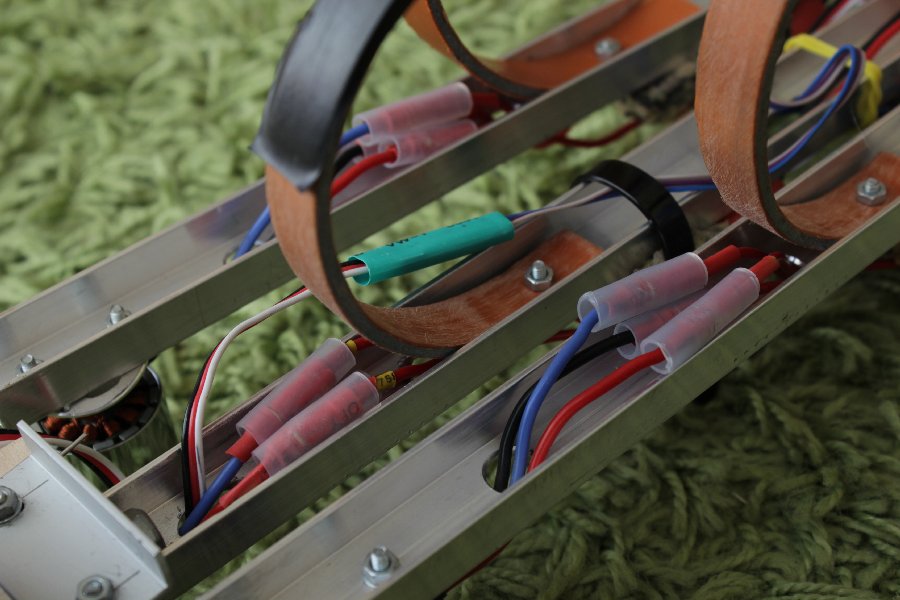
Um die Steckverbinder der Motoren etwas besser vor Kurzschlüssen zu schützen hab ich aus leeren Tintenpatronen neun kleine Schutzhüllen gebaut, welche einfach über die Stecker zwischen ESC und Motor geschoben werden.


Dann wurd es endlich mal Zeit für die Beleuchtung. Vorallem soll sie helfen, durch zwei verschiedene Farben zwischen Vorne und Hinten zu unterscheiden.
Jeder der drei Arme soll 4 Ultrahelle LED's bekommen, welche von einem der ESC mit 5V versorgt werden.
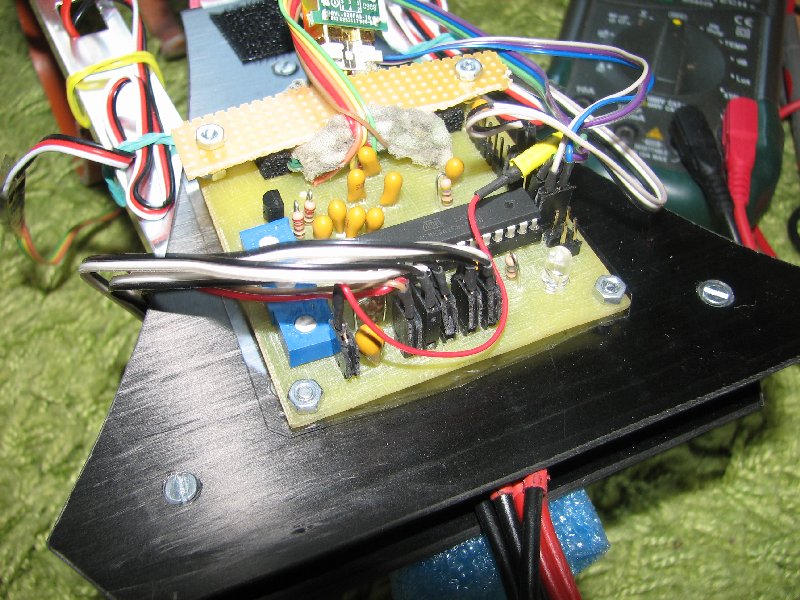
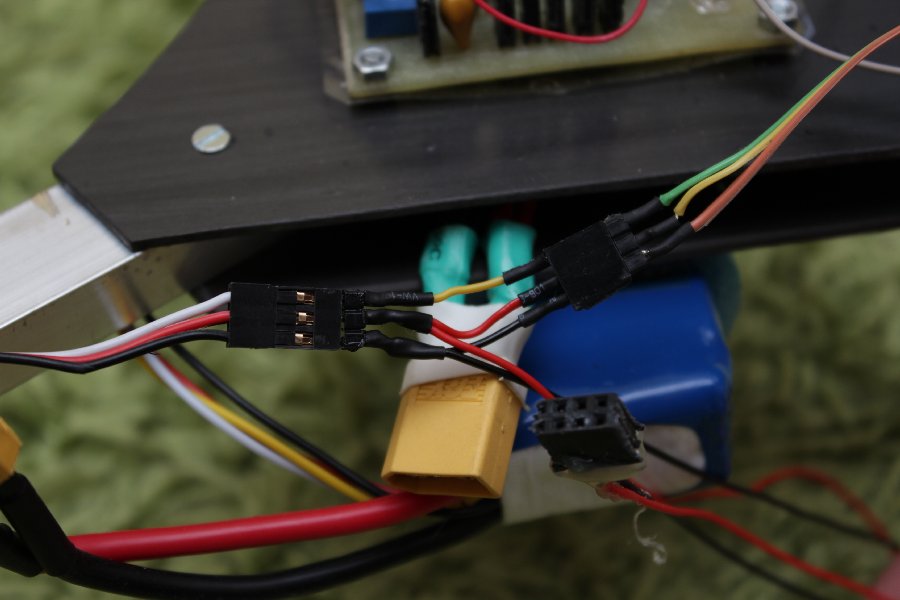
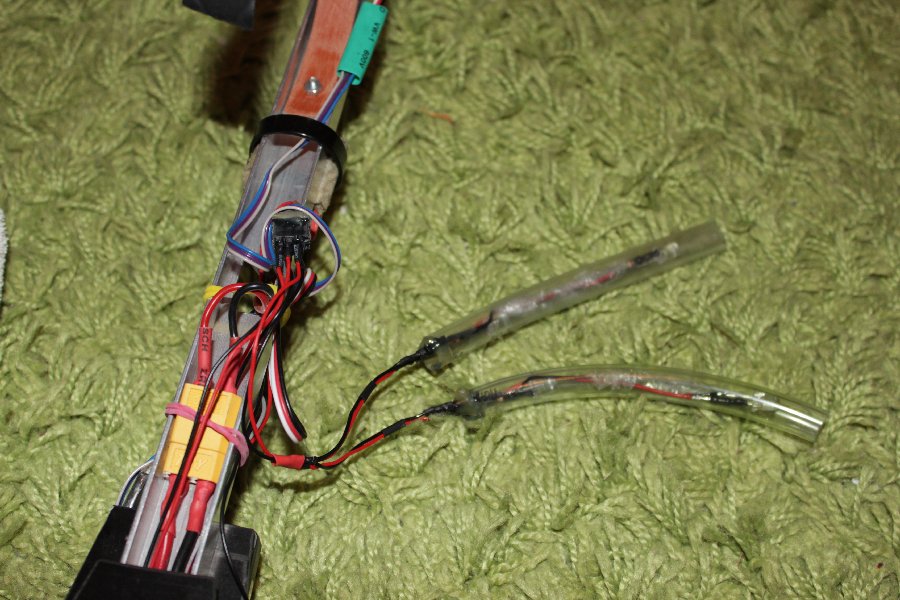
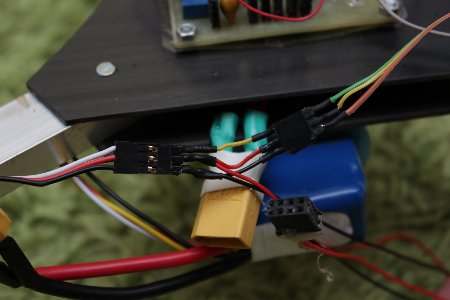
Im linken Bild zu sehen: Der "Adapterstecker" zwischen ESC und dem Kabel zum Flightcontroller, dieser Zweigt die 5V vom ESC ab.
An das andere Ende des "Adapters" können bis zu 3 Kabel angesteckt werden.
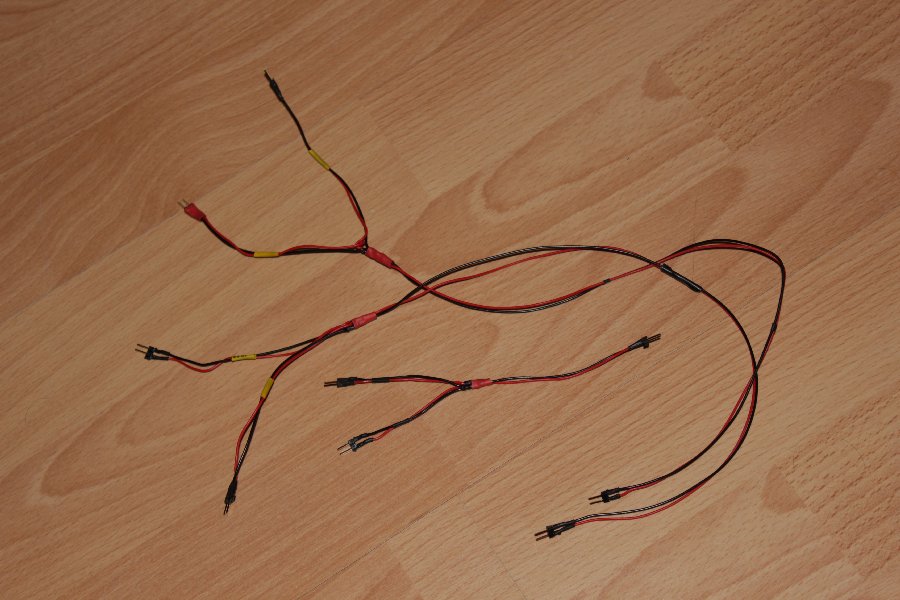
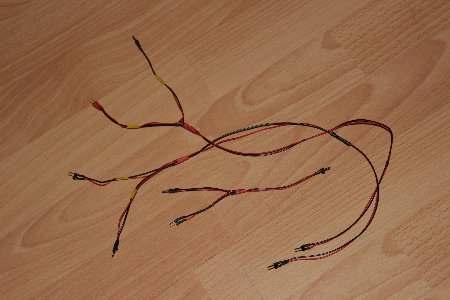
Im rechten Bild: Die 3 Kabel, welche vom "Adapter" zu den einzelnden Armen führen.
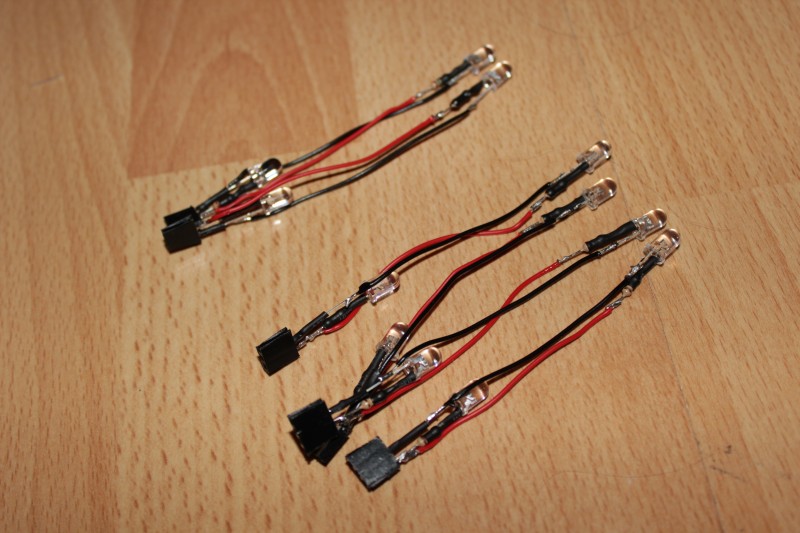
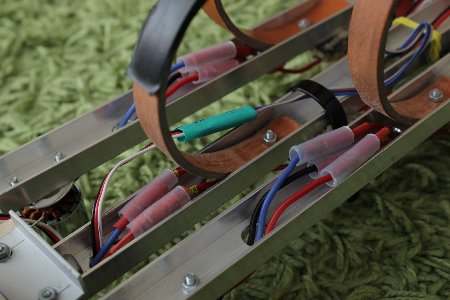
Auf beide Seiten eines Arms kommen jeweils zwei LED's, geschützt in einem durchsichtigen Schlauch.
Diese sind mit je einem eigenen Vorwiderstand parallel geschaltet.
Der Schlauch soll u.a. dazu dienen, das Licht etwas zu streuen.
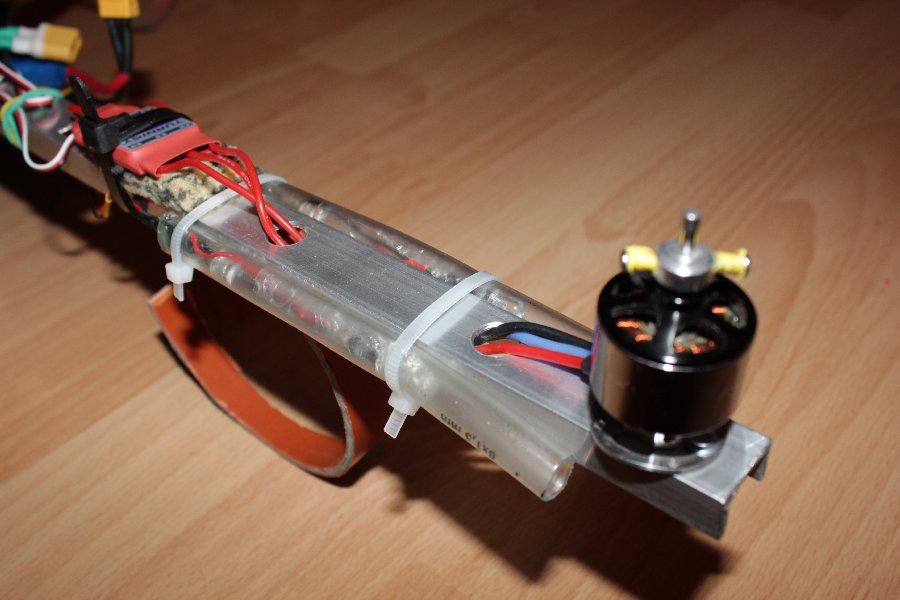
Um die Beleuchtung bei Bedarf auch leicht abbauen zu können, werden die "LED-Schläuche" an die Y-Kabel einfach angesteckt.


An den Armen werden die Schläuche dann mit Kabelbinder befestigt.


Nach einigen Stunden Arbeit war die Beleuchtung dann auch endlich am leuchten.
Vorne grün, der Hintere in bernstein



Und im dunkeln


 Übersicht
Übersicht