Projektbeginn: Mai 2017
Letzte Änderung: Juni 2020
Tiny Whoop

Der
V949 war mein erster brushed Quadcopter dem ich damals recht früh eine FPV Kamera verpasst habe.
Allerdings ist er fürs outdoor Fliegen etwas zu schwach und indoor zu groß.
Nun ist es 2017 und somit fünf Jahre später und die Bauteile werden immer leistungsstärker, kleiner und günstiger.
Für meinen Tiny Whoop hab ich mir direkt die besseren Einzelteile bestellt und ihn von Grund auf zusammengebaut.
Dazu gehören:
Von einigen Teilen hab ich direkt Ersatz mit bestellt. Die Preise sind die vom Zeitpunkt meines Kaufs im Juni 2017.


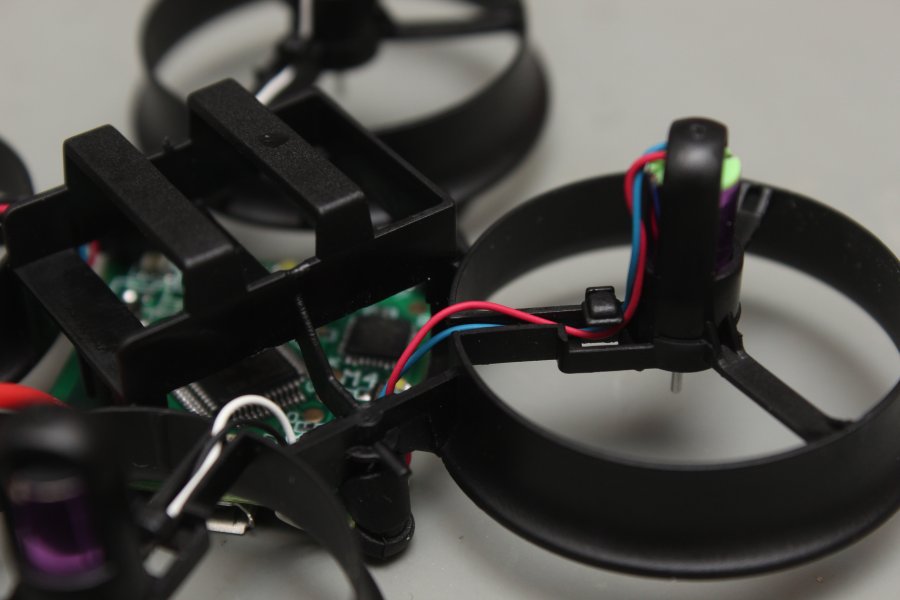
Als erstes werden die kleinen 6x15mm Motoren in das Plastikframe gesteckt. Hierbei ist es hilfreich die Motoraufnahme in einen 6er Steckschlüssel zu legen, sodass beim hineindrücken des Motors das Frame nicht zu stark belastet wird.
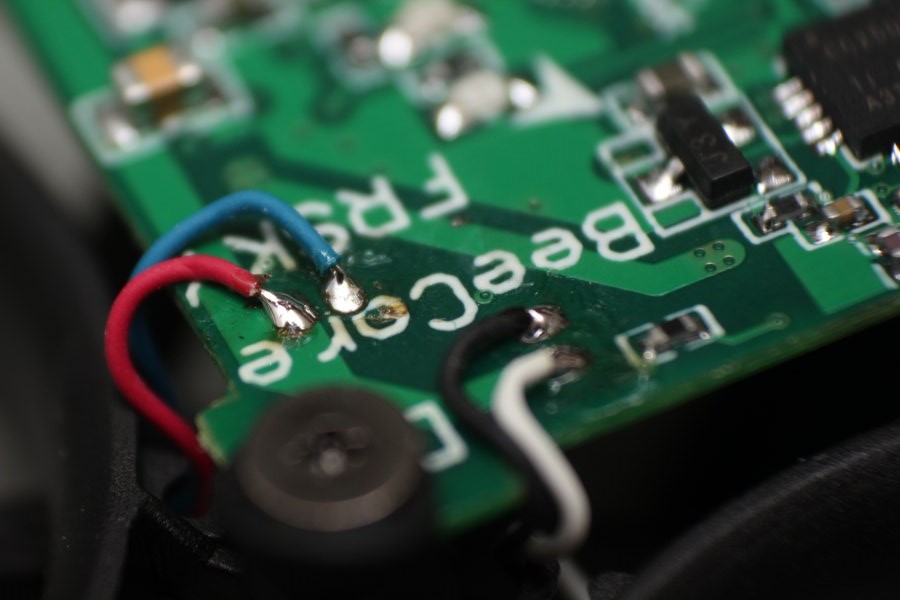
Bevor die Flightcontrol verbaut wird ist es von Vorteil, das Kabel mit dem PWC Stecker zum Anschluss des Akkus auf ca. 5cm zu kürzen und von unten durch die Lötaugen neben dem USB Stecker zu fädeln und zu verlöten.
Anschließend können die Motorkabel durch die dafür vorgesehenen Führungen gesteckt und durch anhalten der Platine passend abgeschnitten (5cm), abisoliert, verzinnt und, nachdem alle vier Motoren eingebaut sind, verlötet werden.
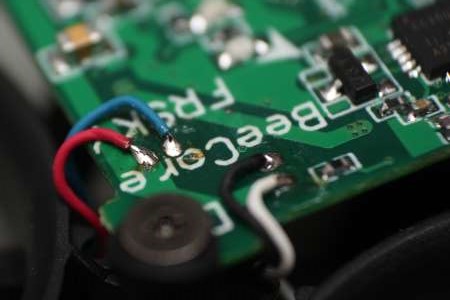
Bei der von mir verwendeten Version der F3 Evo Flightcontrol werden die Weissen bzw. Roten Kabel der Motoren jeweils am äußeren Kontakt der Platine angelötet.

Die Orientierung des Frames ist so, dass der Akku in Flugrichtung eingeschoben wird. Vorne ist da, wo die 3. Schraube die Platine fixieren kann. Hinten ist kein Plastikpin zum Reinschrauben. Im folgenden Bild ist vorne demnach unten rechts.

Als nächstes wird der 3D gedruckte Kamerahalter direkt auf die Platine geschraubt. Zuerst hab ich einen von Thingyverse verwendet, welchen ich jedoch nachträglich zurechtschneiden musste. Später hab ich den Kamerahalter selbst passend gezeichnet und neu gedruckt (Download am Ende der Seite).
Das Stromkabel der Kamera wird etwas gekürzt und direkt auf die Kontakte, mit denen auch der Akku verbunden wird, gelötet.


Danach kann die FC mit dem PC verbunden und wie gewohnt mit dem Cleanflight Configurator eingestellt werden.
Die von mir verwendete Firmware ist die
spracingf3evo v2.0.3
Zum initialen Einstellen bin ich die
User Guide durchgegangen.
Darüber hinaus hab ich in der CLI die Motor PWM Rate auf 4000 gesetzt:
set motor_pwm_rate=4000, da es besser für die Motoren sein soll. [Quelle:
rcgroups.com]
Mehr als die Mittelstellungen der Kanäle an meine Turnigy 9x anzupassen und die Modi Off, Stable und Acro auf den 3 Positionsschalter zu legen hab danach nicht gemacht.
Screenshots der Einstellungen und das Backup sowie einen CLI Dump hab ich sicherheitshalber mal gemacht:
settings_201709.rar

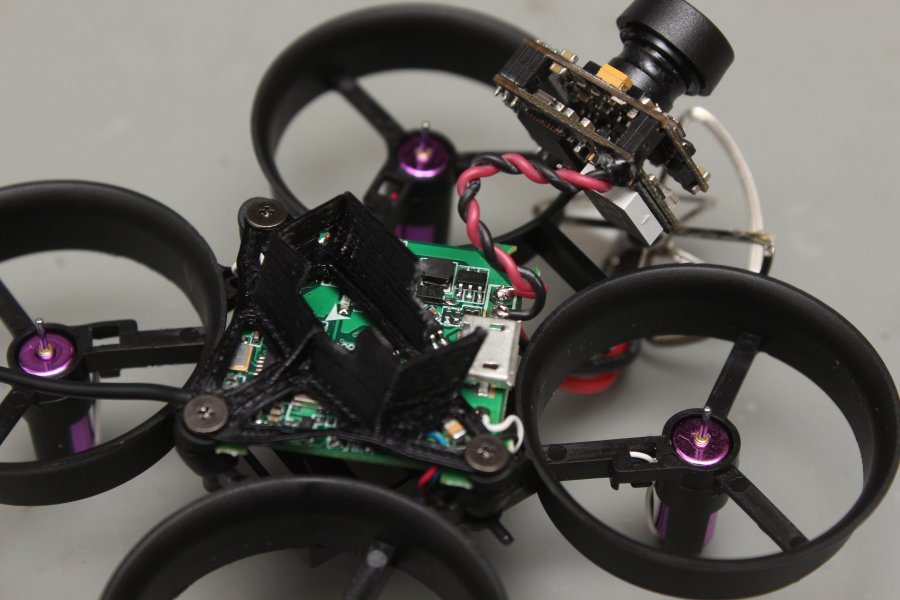
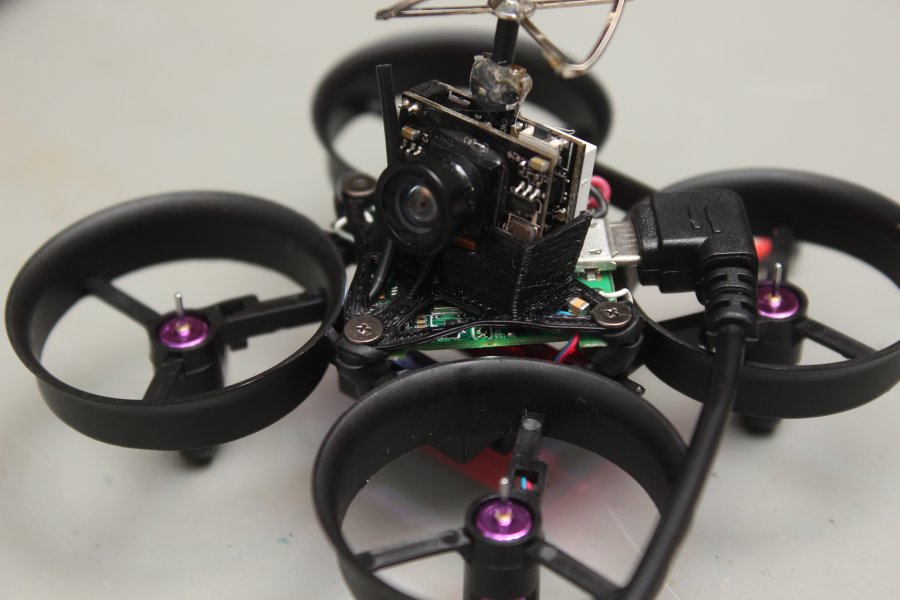
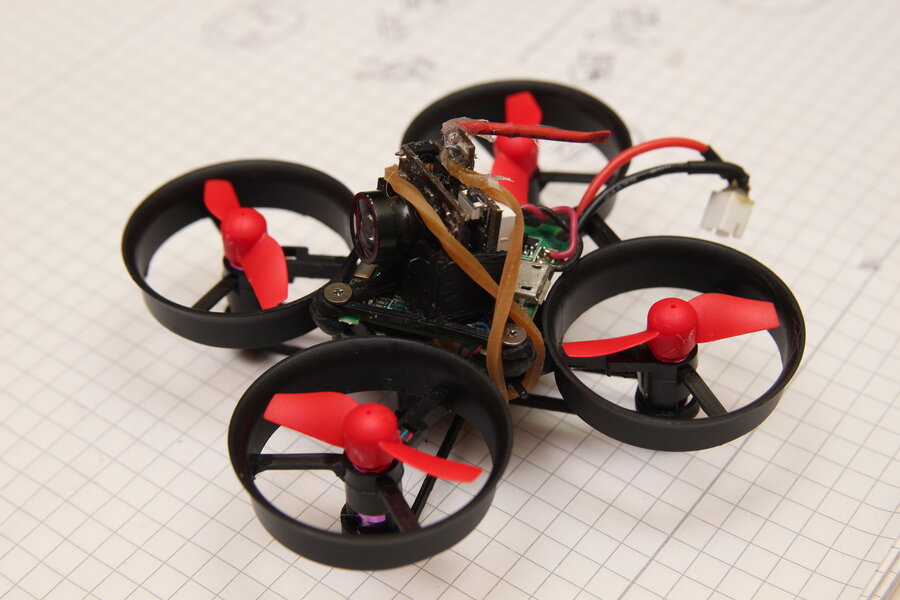
Mit besagtem 255mAh mylipo Akku und allem, was auf dem Bild zu sehen ist wiegt er 28,9 Gramm.
Bei neuen DC Bürsten Motoren wurde mir gesagt sei es besser, sie einlaufen zu lassen. Dazu wird der Copter mit Propellern am Boden gehalten und auf langsamer Drehzahl ca. 2 Minuten laufen gelassen.
Die Drehrichtung der Motoren sollte an den Farben der Motorkabel abgelesen werden. Motoren mit Schwarz/Weiss drehen gegen den Uhrzeigersinn (linksrum), von oben gesehen. Motoren mit Blau/Roten Kabeln drehen dementsprechend im Uhrzeigersinn.
Ist dem beim ersten Test nicht so sind die Motoren entweder vertauscht oder die Kabel falsch an der Platine angelötet. Tauschen der Propeller ist nicht zu empfehlen, da die Motoren mit falscher Drehrichtung sich schneller abnutzen können.
Wer die Einkaufsliste von oben noch im Kopf hat wird sich wundern, warum hier nun 2-Blade Propeller statt den gekaufen 4 Blatt zu sehen sind. Da ich die die schnelleren Motoren mit 67k RPM verwende sind die 4 Blatt Propeller nicht nötig und liefern nicht nennenswert mehr Schub aber deutlich mehr Leistung. Zum Indoor fliegen hat der kleine Copter sowieso mehr als genug Schub, wesshalb zwei der Blätter abgebrochen und die Reste mit einem Messer flach geschnitten werden können.


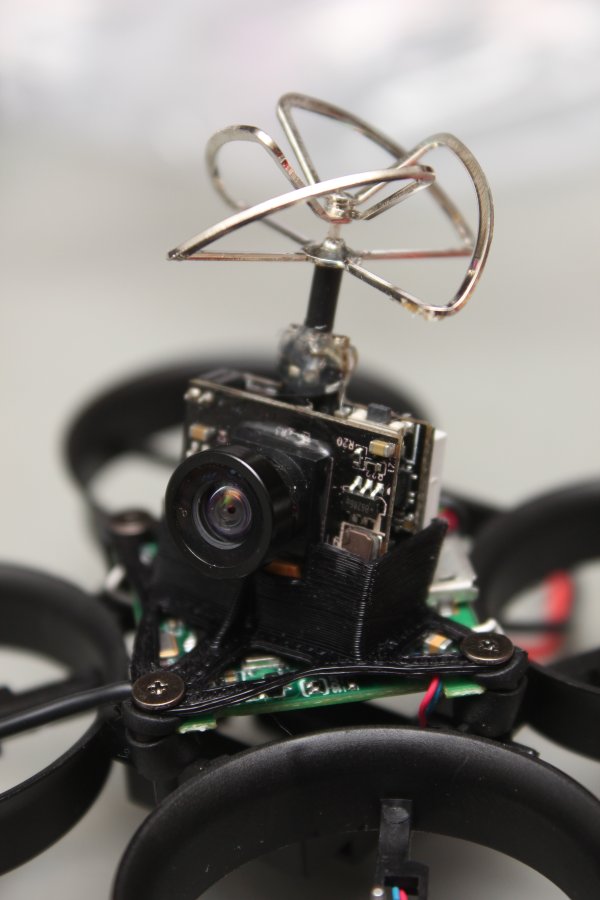
Die Kamera muss mit einem Gummiband noch am Frame festgezogen werden, danach ist er Flugbereit.
Das 2. Bild zeigt meinen Tiny Whoop und den eines Kollegen. Danke nochmal an Timo für die Tipps beim Aufbau.


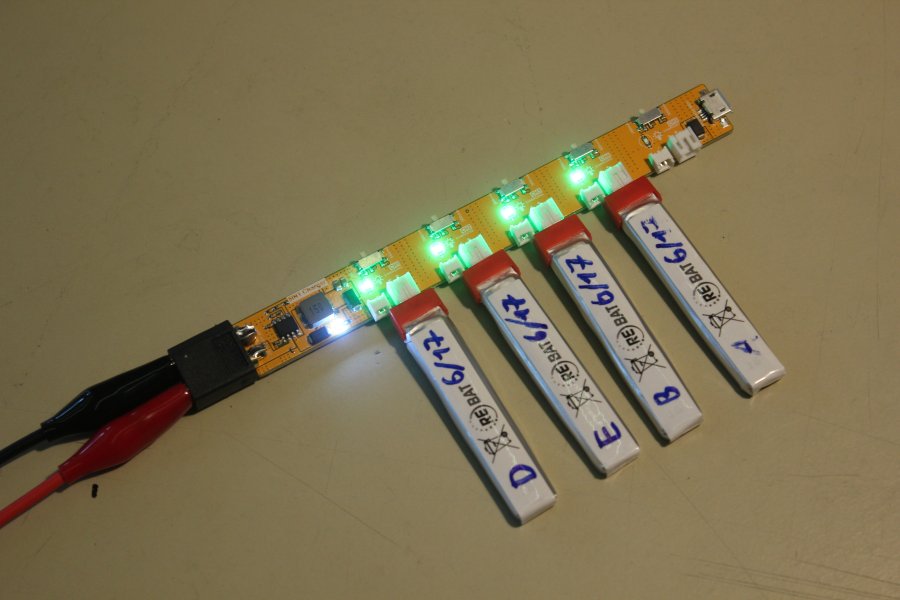
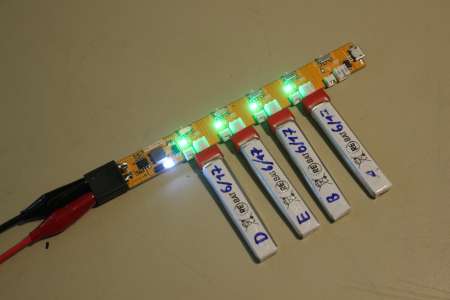
Der oben aufgelistete 5-fach lader ist enorm Praktisch. Ein Akku reicht für etwa 3 Minuten Flugzeit. Einfach einen fertigen Akku vom Lader durch den gerade geflogenen austauschen und weiter gehts.
Die verbaute Flightcontrol hat jedoch keine Spannungsüberwachung und ein Lipopiepser ist einfach zu schwer. Desshalb sollte in der Fernsteuerung ein Timer eingestellt werden. Ich habe dazu 1m30 bei Throttle % eignestellt. Bei einem Schwebegas von 50% entspricht das 3 Minuten Flugzeit. Geringere Flugzeiten bei mehr Gas werden dadurch kompensiert.
Die eigene Flugzeit sollte durch vorheriges Austesten ermittelt weren. Das Laden an einem richtigen Lipolader zeigt dann die verbrauchte Kapazität, welche bei mindestens 80% der Angegebenen liegen sollte.
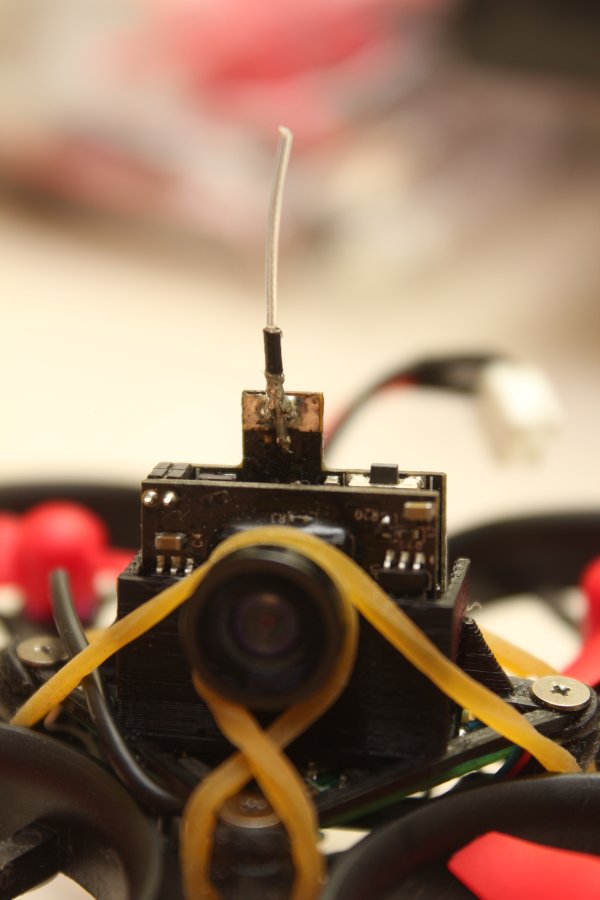
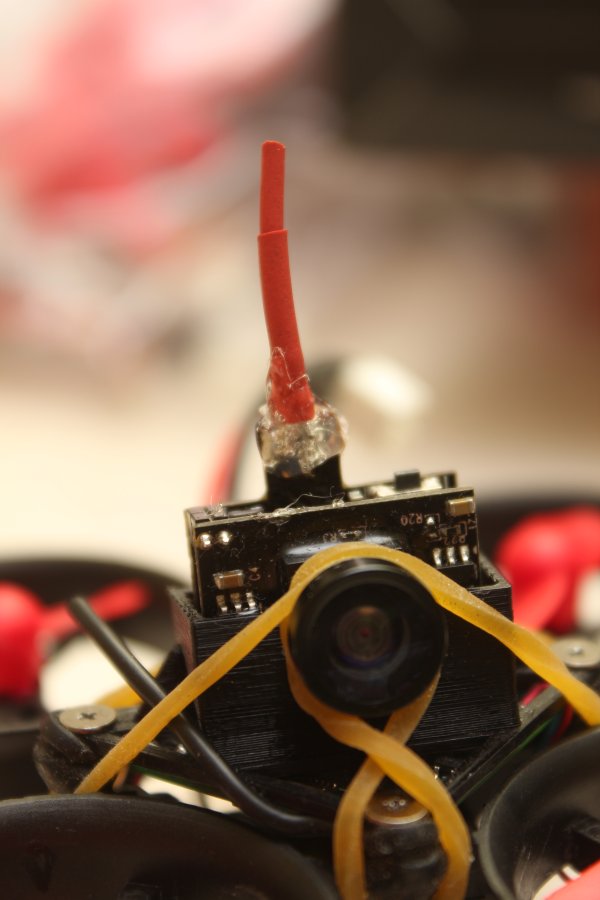
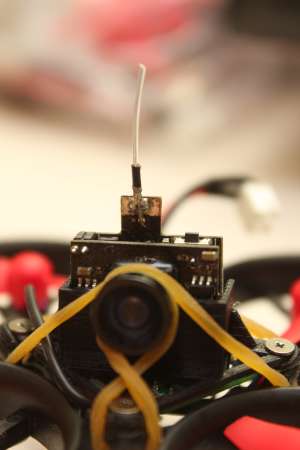
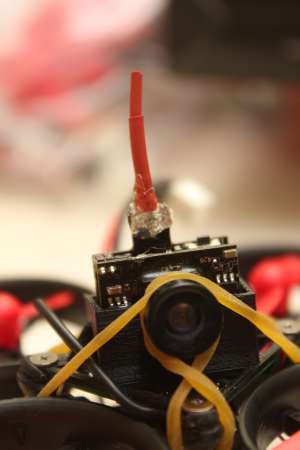
Die Cloverleaf Antenne ist fürs indoor Fliegen nicht nötig, da bei mir vorher die Funkverbindung zum Copter vorher abreißt. Ein Stück Koaxkabel mit 12.77mm abisoliertem Ende reicht als FPV Antenne definitiv. Der integrierte 5.8 GHz Videosender sollte auf 25mW eingestellt werden. Dadurch werden Interferenzen durch Wände verringert.
Auch wird der Copter so etwas leichter. Später hab ich die Antenne um 90° nach hinten gedreht, wodurch engere Stellen besser passierbar werden.
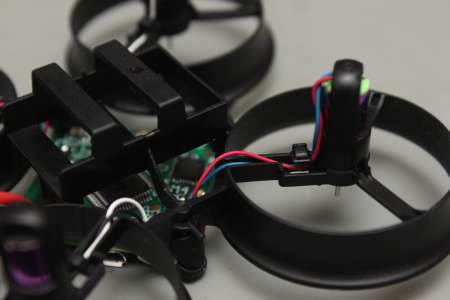
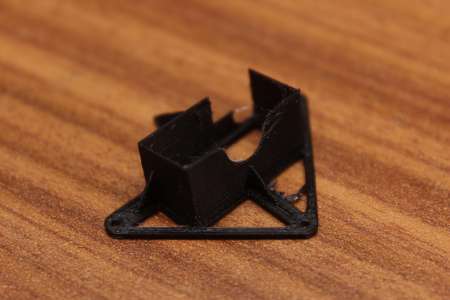
Ein 3D gedrucktes Kreuz kann noch von unten auf die Motorhalter gesteckt werden. Damit brechen sie weniger einfach ab, so die Theorie. Download unten.
Aktuell wiegt der Copter mit besagtem Halter und 255mAh Mylipo Akku 29,4 Gramm.
Die letzten drei Jahre bin ich mal öfter, mal weniger oft mit dem Tinywhoop geflogen.
Die Motoren halten schon okay lange durch, sollten aber als Verbrauchsmaterial angesehen und getauscht werden, wenn einer mal nicht mehr von selber starten möchte.
Bei den Flügen blieb es auch nicht aus mehrere Male eher kräftig irgendwo gegen zu ballern.
Fixen der gebrochenen Stellen am Frame ging am Anfang mit Sekundenkleber noch ganz gut, nach dem zwanzigsten Mal an der selben Stelle dann aber auch nicht mehr.
Neben Motoren hatte ich damals auch direkt ein zweites Frame mitbestellt, was ich nun gut gebrauchen konnte.
Wo ich schonmal dabei war hab ich auch gleich Cleanflight von 2.0.3 auf 2.5.0 geupdated. Die Settings liessen sich nach nur wenig Suchen in der neuen GUI wieder eingeben.
Das Feature den Copter durch das Motorsurren wiederzufinden fand ich mit nicht vorhandenem Buzzer sehr nützlich. Dazu sollte jedoch "set small_angle = 180" in der CLI eingegeben werden, damit der Copter sich in jeder Lage armen kann.
Pitch und Roll Expo hab ich auf 0,55 erhöht, da die Regelung deutlich aggressiver trotz gleicher Werte war. Throttle Expo mit 0,4 schien mir auch sinnvoll für indoor Flüge.

Files
tinywhoop_cammount.stl
tinywhoop_stiffener.stl
settings_201709.rar