Klapp Tcopter
April 2014

Nachdem ich den Stecktri fertiggestellt und eingeflogen hatte wollte ich endlich mal wieder FPV fliegen. Da mir aber der Stecktricopter aus Holz etwas zu groß ist und wohl einen leichten Absturz nicht so leicht wegsteckt brauchte ich was kleines, schnellgebautes.
Der Stecktri soll auch andere Motoren, als die von dem vorherigen Tricopter 2 bekommen. Somit kann ich die leistungsstärkeren Multistar 2213-980KV inklusive SimonK geflashter Mystery 30A Regler dafür verweden.
Da ich zu Anfang einfach nur einen simplen Tricopter bauen wollte fand ich eine T Konstruktion sinnvoll, da dort die vorderen Arme aus einem Teil bestehen können. Beim zeichnen der Centerplates fiel mir dann aber auf, wie einfach es doch ist die vorderen Arme nach hinten einklappbar zu machen, indem sie einfach in der Mitte getrennt werden.
Zu den Centerplates: Wiedermal Hartfaserplatte in 2,5mm Stärke. Insgesamt drei vertikale steckbare Verstärkungen. Der Zwischenraum für Kabel etc. beträgt lediglich 14mm. Obwohl eh schon 10" Props auf die 980KV Motoren kommen sollte der rest so klein wie möglich werden. So wurde die Centerplate 80mm breit und 150mm lang, die vorderen Props drehen also bis kurz vor der Centerplate.
Den Yaw-Mechanismus hab ich teilweise vom Tricopter 2 gemoppst, da er sich für mich als durchaus brauchbar erwiesen hat.
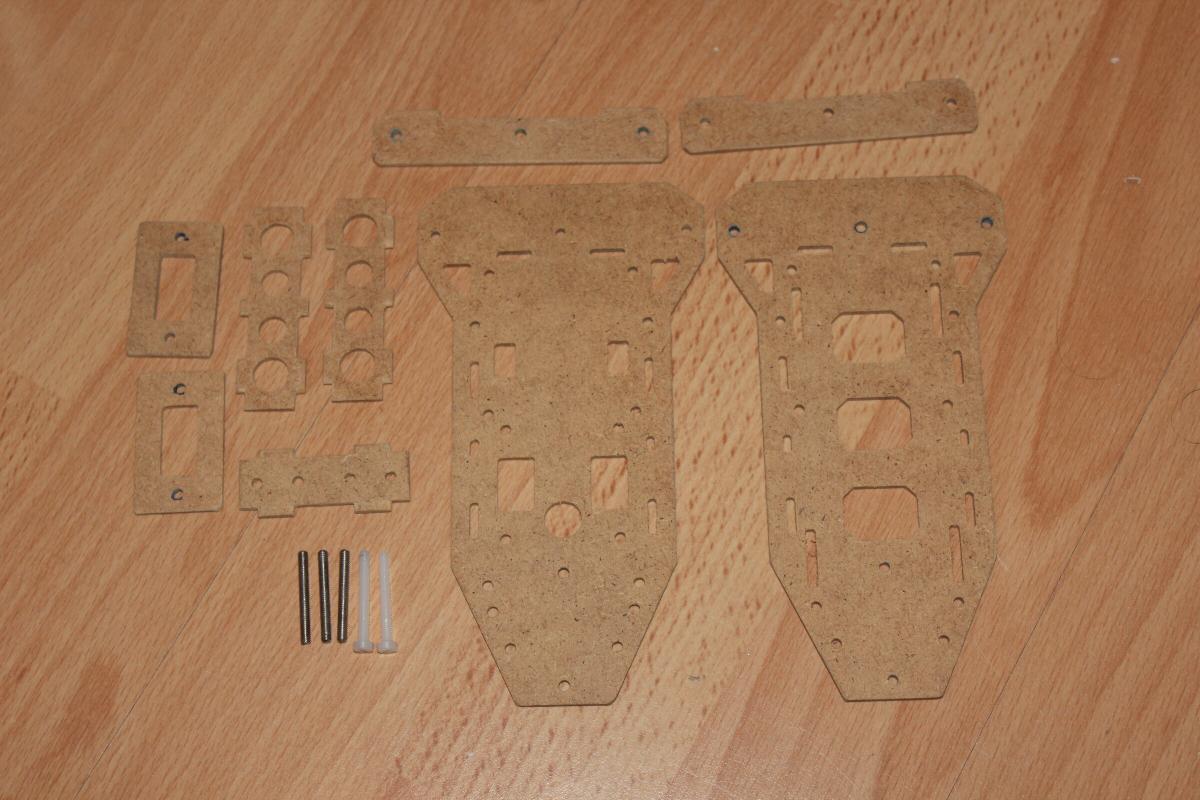
Hier die gefrästen Teile. Beide Centerplates, zwei seitliche Reinsteckverstärkungen und eine in der Front, die auch als Auflage für die Frontarme dient. Die restlichen Teile dienen wie auch beim Tricopter 2 als Abstandshalter und Auflage für die Aluprofile.
Pro Arm kommt ein zurechtgeschnittenes Stück M3 Stahlgewindestange als Verschraubung zum Einsatz, der Rest wird mit M3 Nylonschrauben zusammengehalten.
Achja, hier die DXF’s: 20140426_tcopter_dxfs.zip, darin enthalten auch direkt das FPV-Krams-Halteteil (fpv_plate.dxf) (siehe weiter unten).
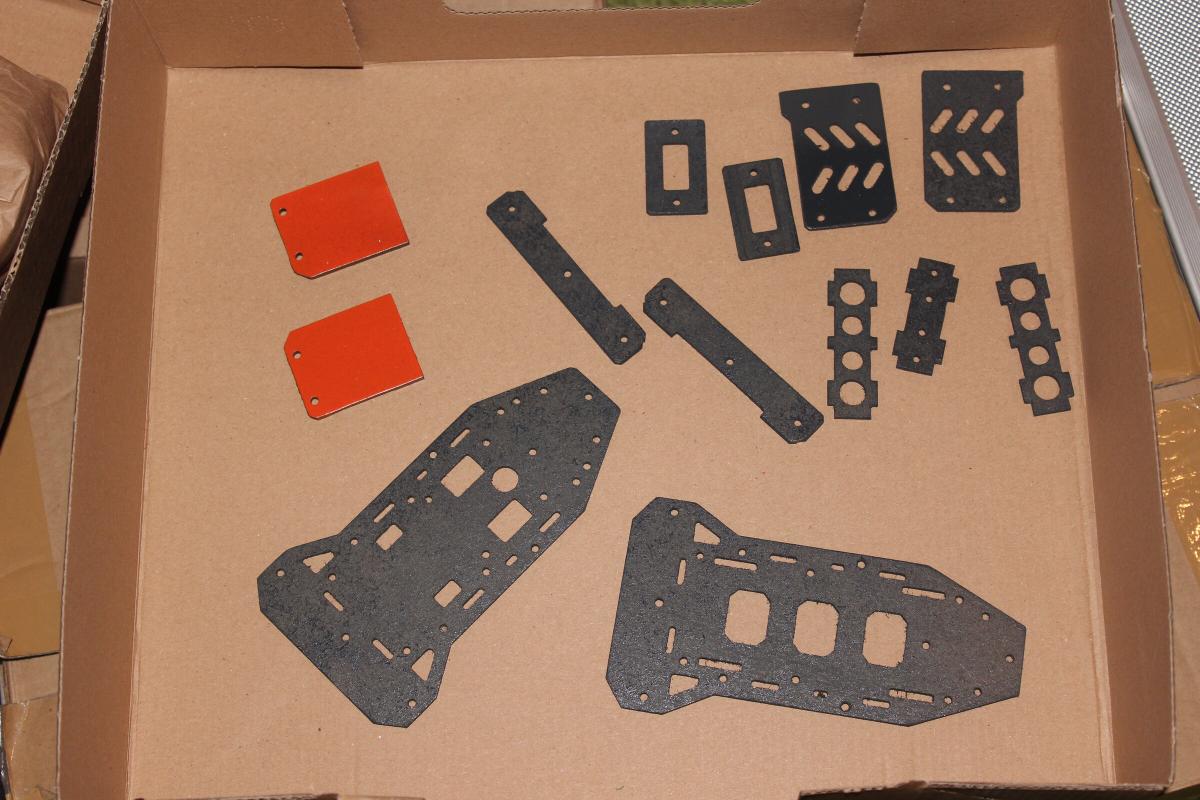
Wie zuvor auch beim Stecktri wird die Front möglichst Orange, der hintere Teil schwarz oder anthrazitgrau. Ist irgendwie der beste Kompromiss zwischen erkennen in der Luft und wiederfinden im Gestrüpp.
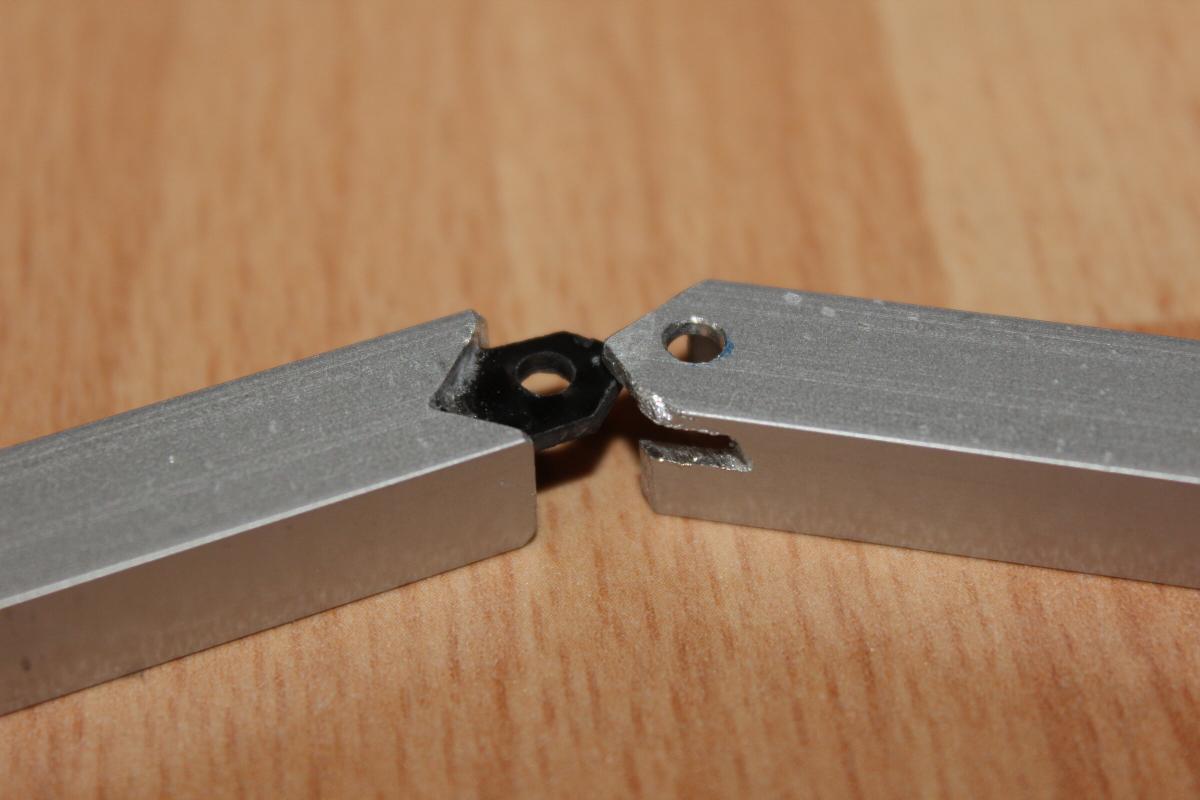
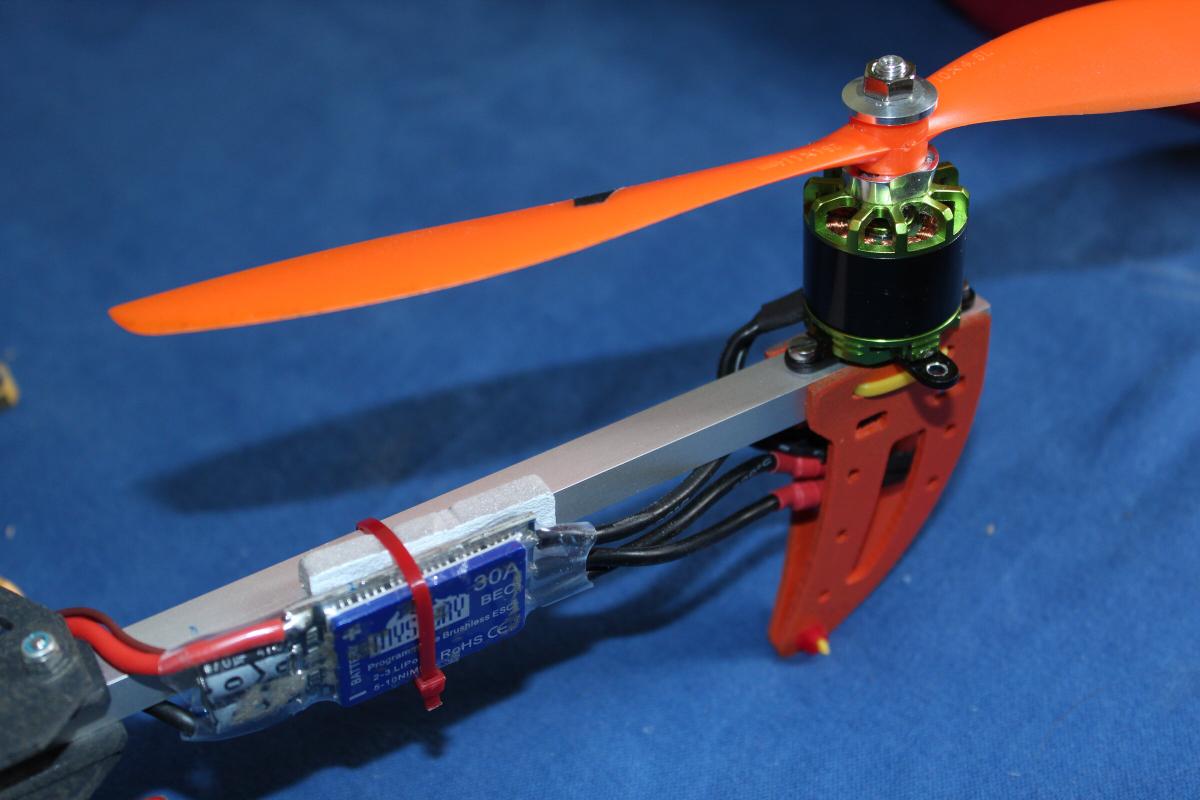
Das Aluprofil f&uum;r die Frontarme ist eines in U-Form mit 10mm x 10mm. In der Mitte aufgesägt ist der Copter schon klappbar.
Damit er aber beim Zusammenklappen auch so bleibt soll eine Schraube, die mittig durch beide Armteile gesteckt wird diese gut genug zusammenhalten. Wie im Bild zu erkennen greifen die V-Form mit dem CFK-Teil und das Gegenstück dazu ineinander. Im Falle eines z.B. seitlichen Zusammenstoßes mit einem Baum hoffe ich, dass diese Verbindung zuerst nachgibt und sich die Arme dann einfach nach hinten wegklappen.
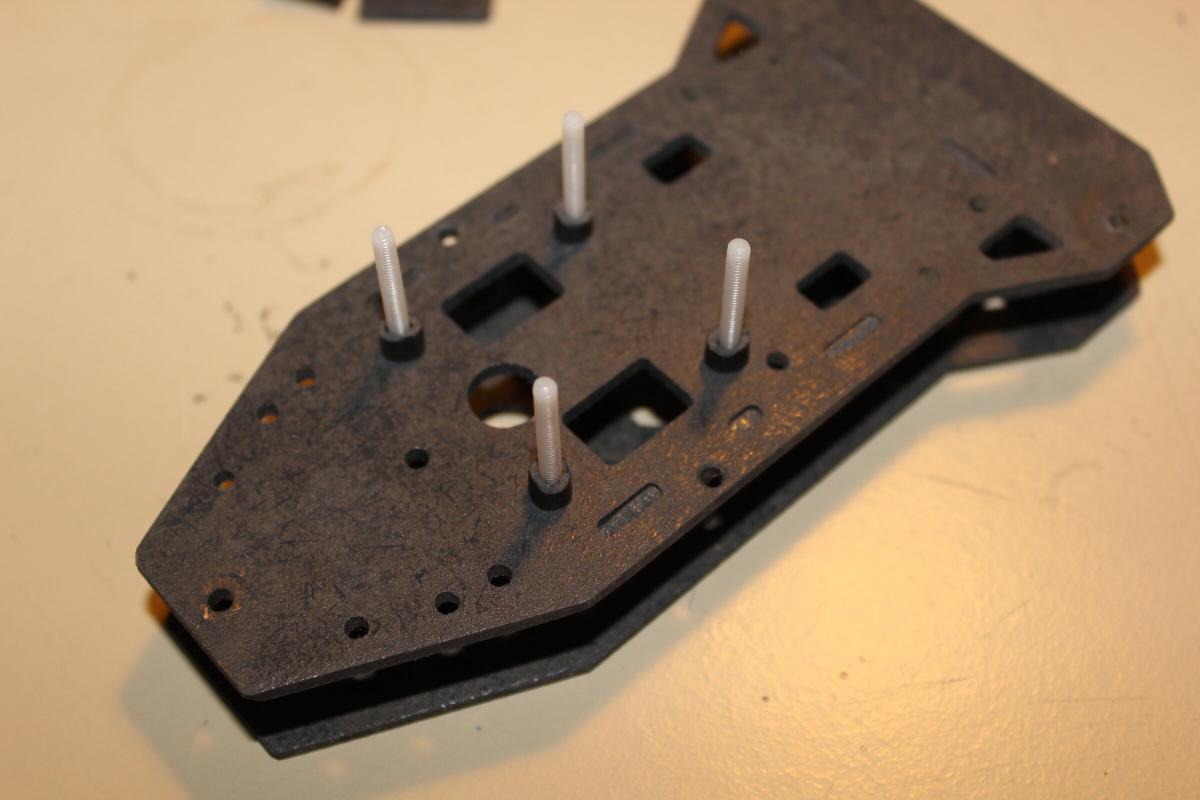
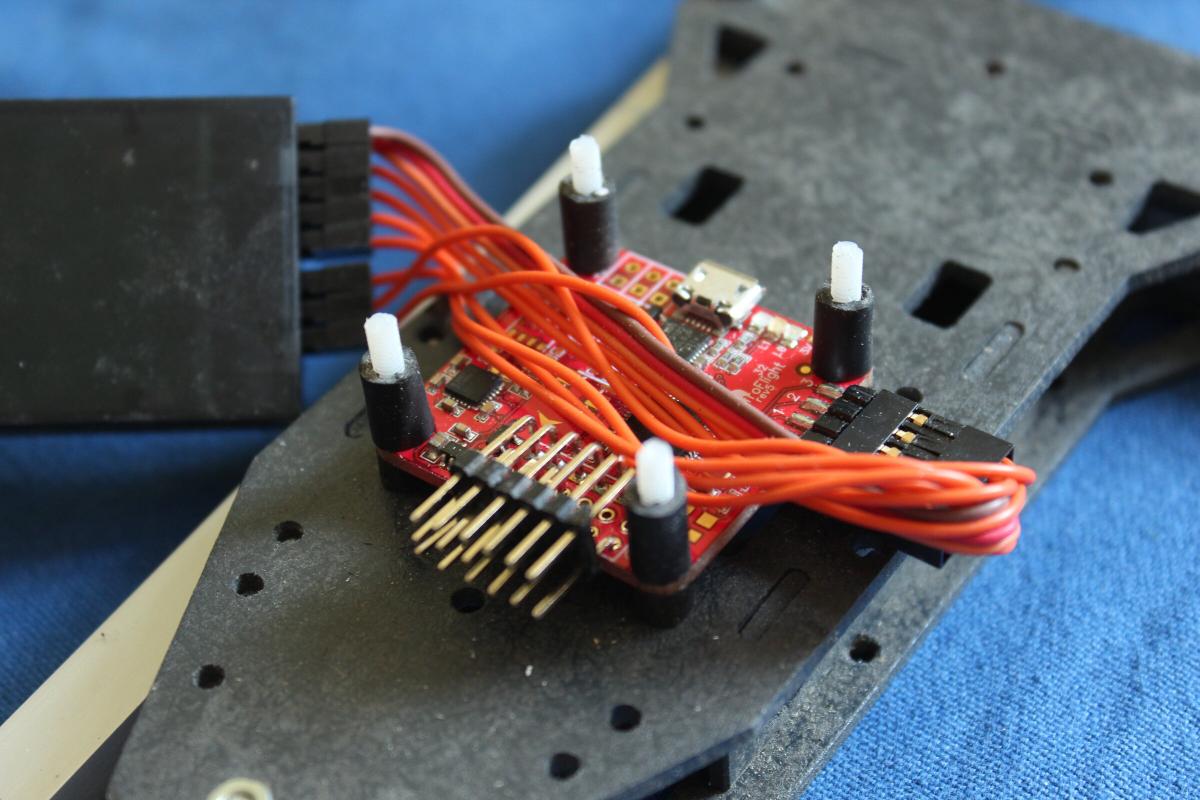
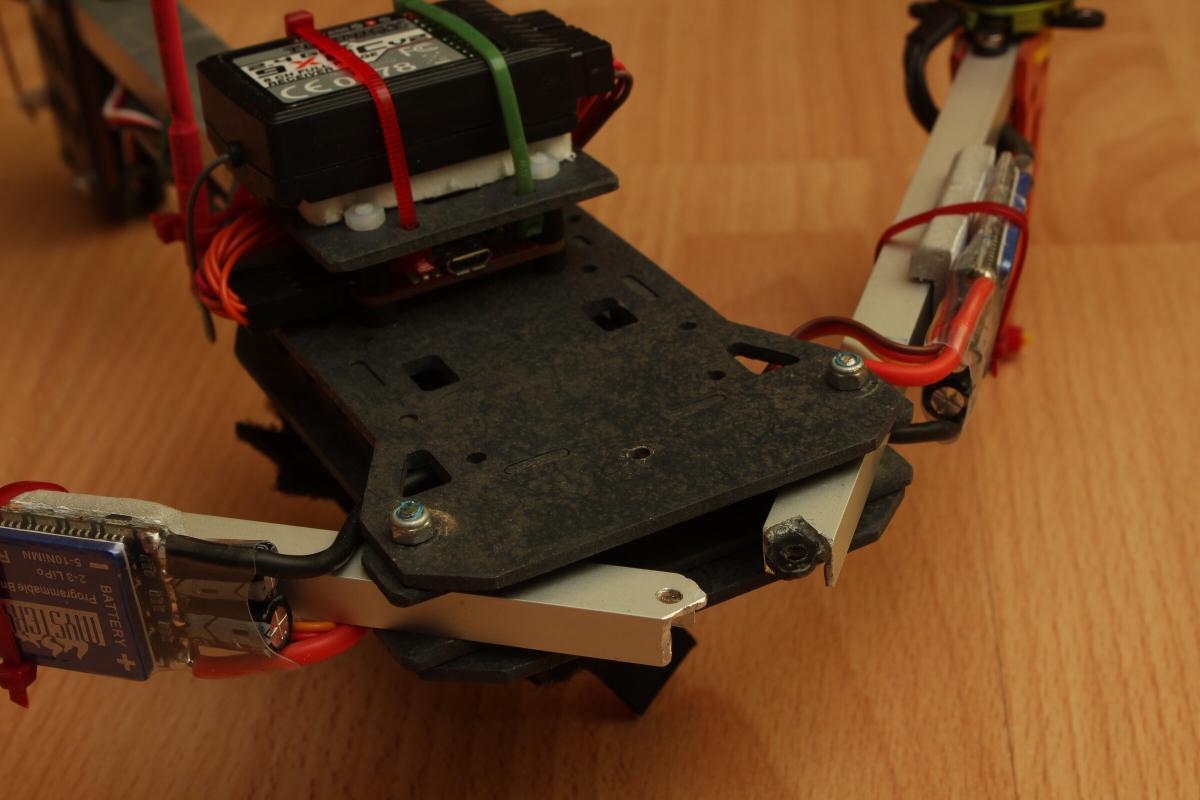
Die Centerplates werden mithilfe der drei Steckverbindungen aufeinander gesteckt. Dazwischen kommt dann die Stromversorgung, in meinem Fall also drei XT60 Verbindungen für die ESCs. Obendrauf auf vier Nylonschrauben ein Naze32 Rev5 von abusemark.com, welches ich auch aus dem ersten Stecktri Aufbau geklaut hab. Ganz oben drauf noch eine simple Holzplatte um den 9x Receiver zu halten.
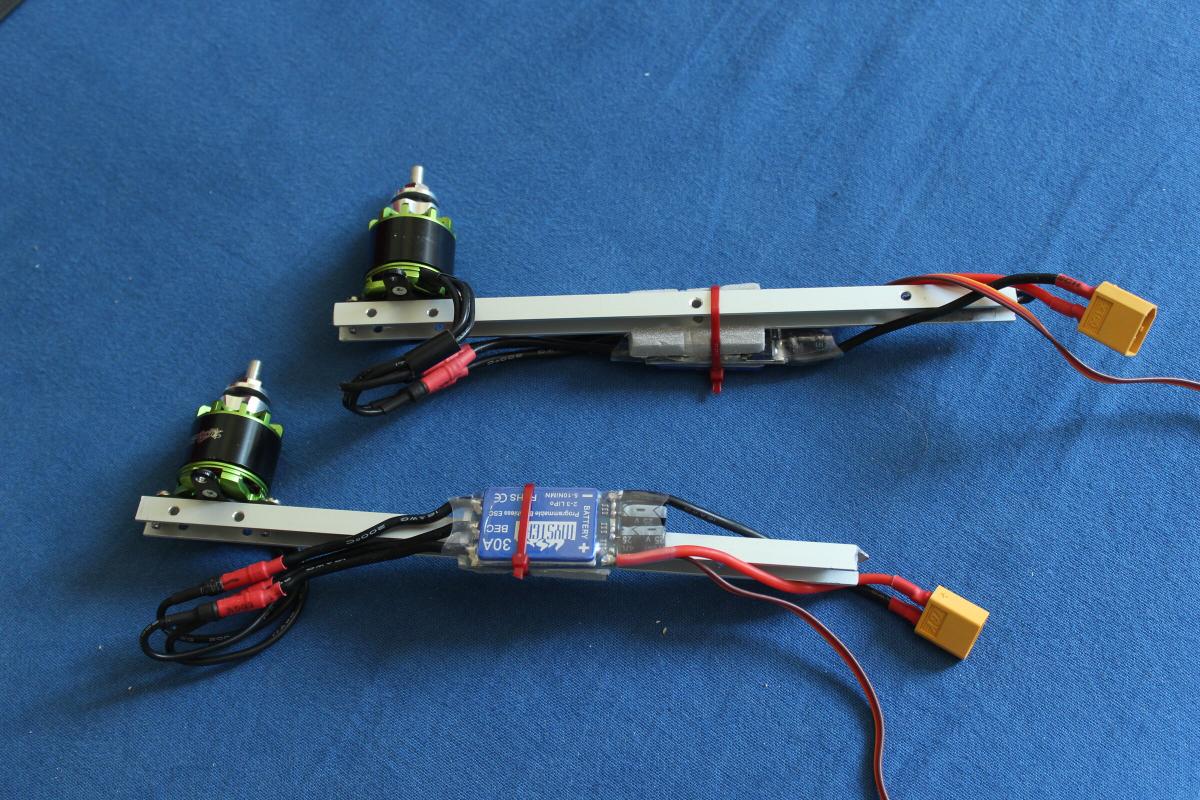
Hier die erwähnten XT60 Buchsen, mit kurzen Kabelstücken zusammengelötet auf eine doppelseitige Kupferplatine und kruzschlussgeschützt durch ordentlich viel Heißkleber. Das längere Silikonkabel mit dem gelben XT60 Stecker ragt dann nachher an der Seite aus den Centerplates raus, da kommt dann der Lipo dran.

Die Motoren sind direkt auf die Arme geschraubt. Die ESCs werden auch nur durch einen Kabelbinder gehalten, einfacher gings nicht.
Yaw Mechanik hab ich größtenteils vom Tricopter 2 übernommen. Nur den Holzklotz, auf dem der Motor angeschraubt wird musste ich in etwas größer fertigen. Diesmal auch einfach aus einem dicken Stück Multiplex.
Achja, der hintere Ausleger ist übrigens ein 20mm breites U-Profil.

Als er dann fast ferig war fehlten mir wiedermal die Landebeine. Also ebend schnell welche gezeichnet und gefertigt. Damit sie auch bloß nicht zuviel aushalten hab ich die vorderen Landebeine mit Kabelbinder am Ende der Arme angebracht.

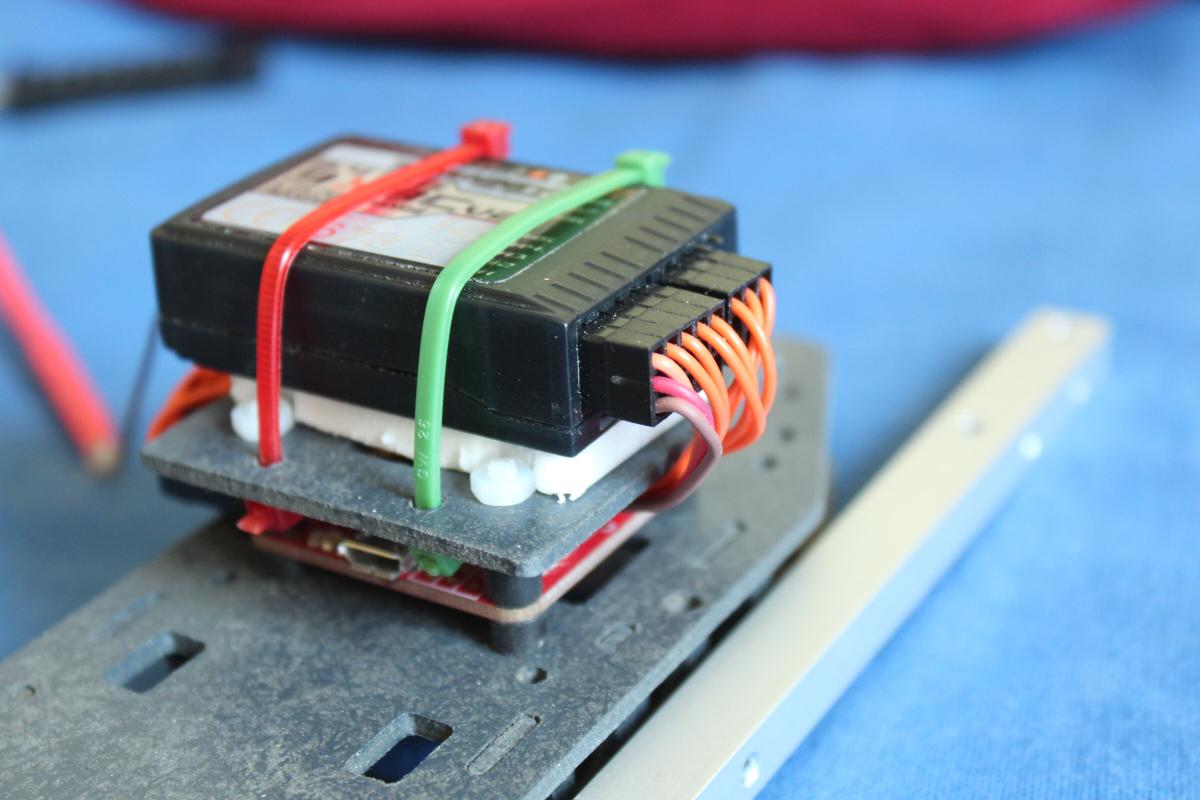
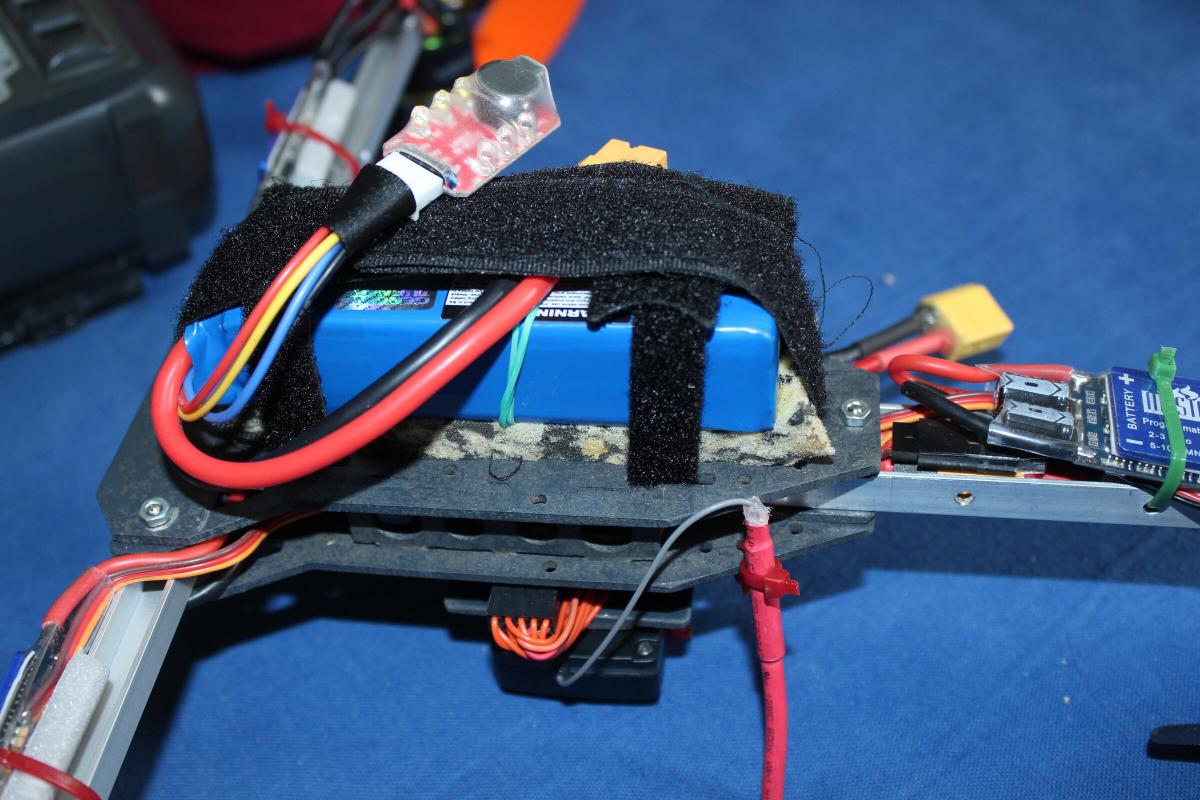
Der Lipo (im Bild ein 2200er 3S) wird untendrunter auf einem Schraumstoffstück mit ausreichend Klettbändern gehalten, der rutscht nicht so schnell weg.
Und er ist fertig.
Zusammengeklappt ist er deutlich schmaler.
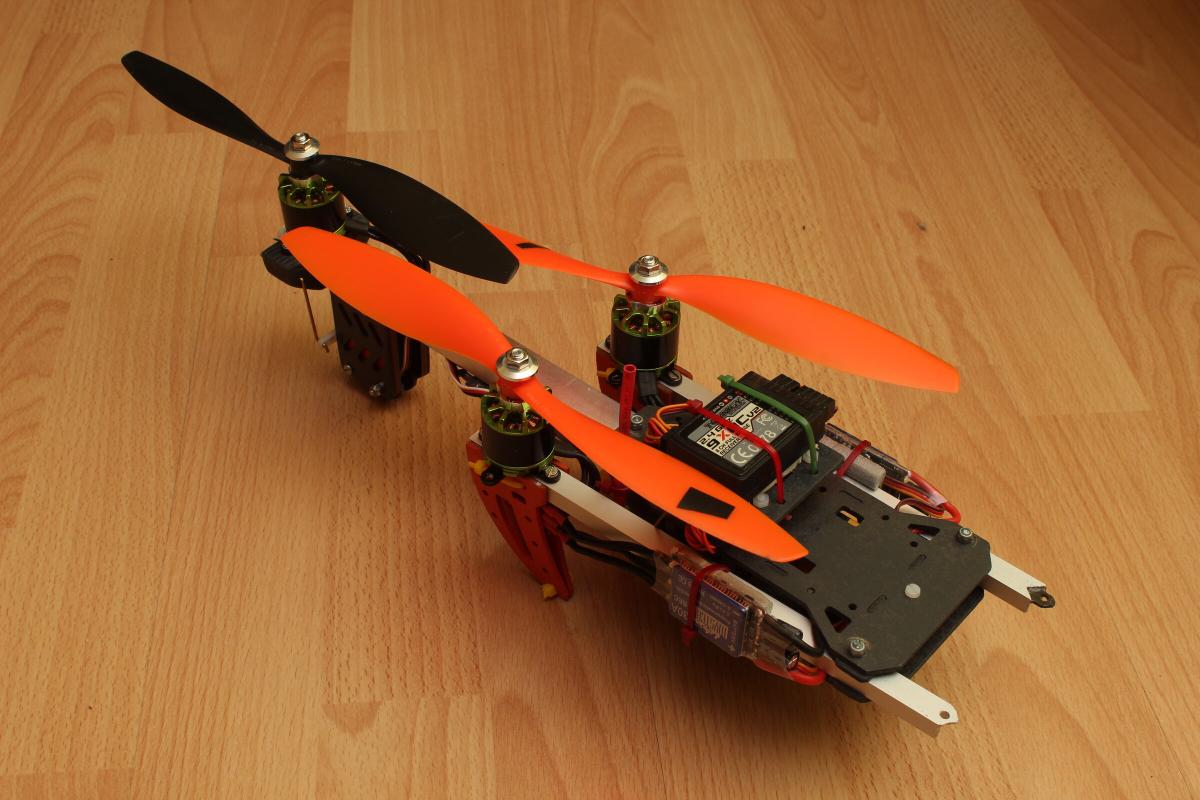

Wesswegen ich den Tcopter eigendlich gebaut hab war ja das FPV-Fliegen.
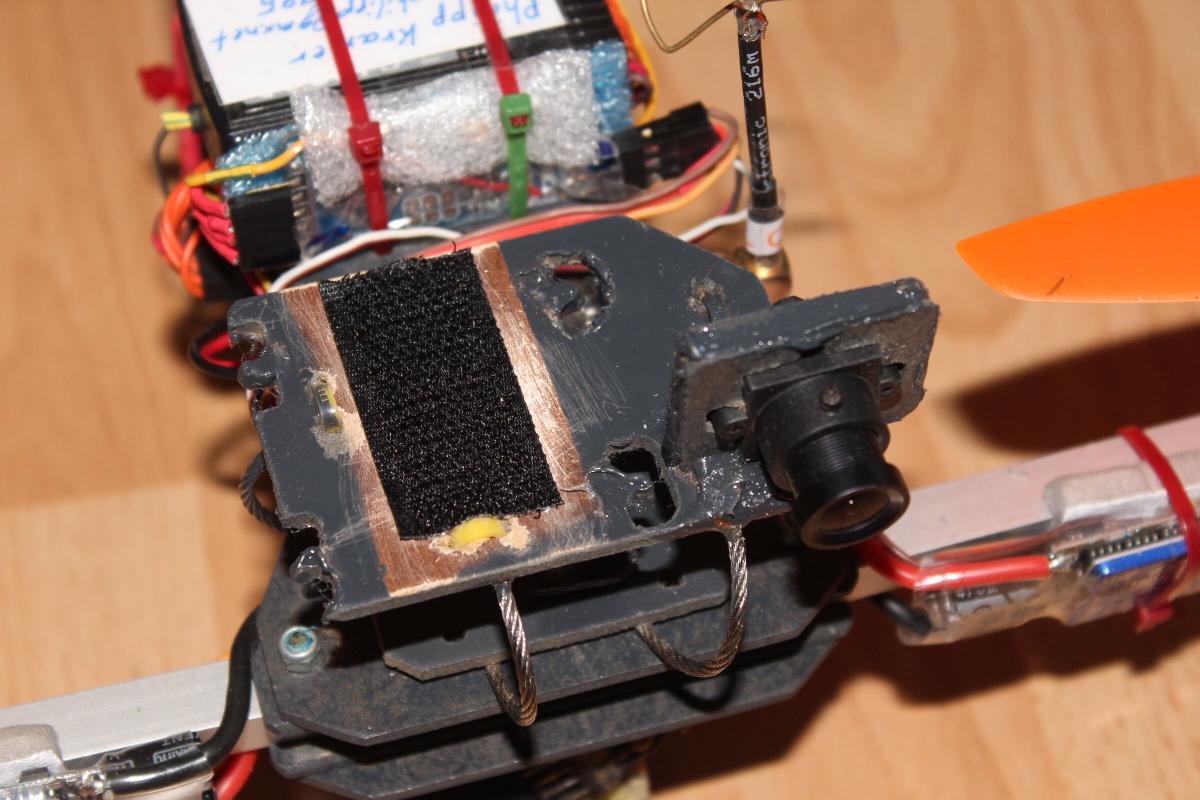
Vor der FC ist zum Glück noch ne menge Platz für 5.8Ghz Sender und Kamera (ein Minim OSD soll auch noch drauf).
Das Ganze ist auf eine kleine Holzplatte (die zu Beginn erwähnte fpv_plate.dxf) geziptied. Die Holzplatte (bestehend aus zwei zusammengeklebten Platten), in der Die FH18C Kamera Steckt ist mit zwei 1,5mm Messingdräten mit der FPV_Plate verbunden, wodurch die Kamera etwas geneigt werden kann.
Toll toll, supertoll. Er fliegt und das nichtmal so übel.
Vorallem hat er endlich mal ordentlich Dampf, was wohl auch an den 600 Gramm liegt, die er ohne Akku wiegt.

Endlich kam ich nun auch mal dazu, das Minim OSD anzuschließen. Etwas versteckt hab ichs mit Kabelbinder eingepackt in Schaumstoff direkt neben den Receiver geklemmt.
Mobius
Beim Designen des Copters hab ich wohl ganz vergessen, dass dort später mal eine HD-Kamera mit drauf soll. Die Gopro ist für diesen kleinen Senkrechtstarter viel zu groß.
Als ich mir dann endlich eine Mobius geleistet hab, stellte ich fest, dass auf dem Copter garkein Platz mehr ist.
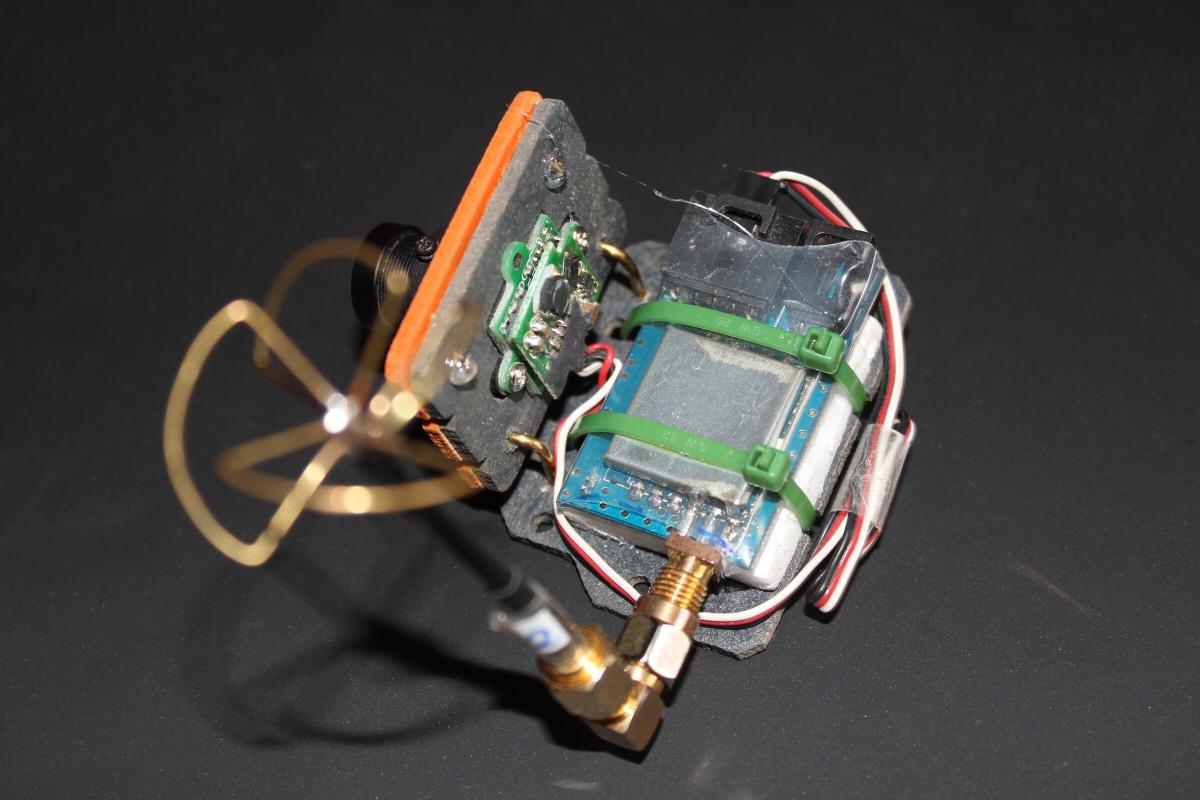
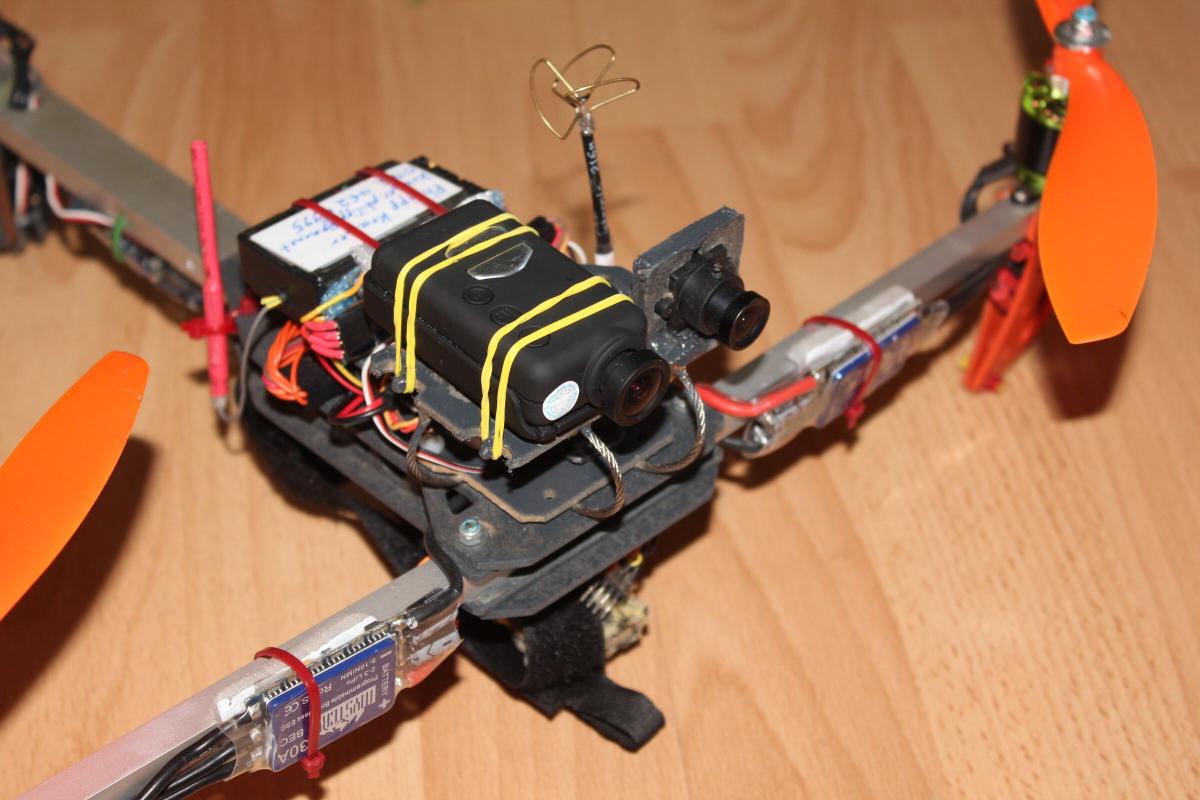
Da das FPV-Setup vorne abnehmbar ist, entschied ich mich dazu, die Mobius mit der FPV-Cam über dem Videosender zu platzieren.
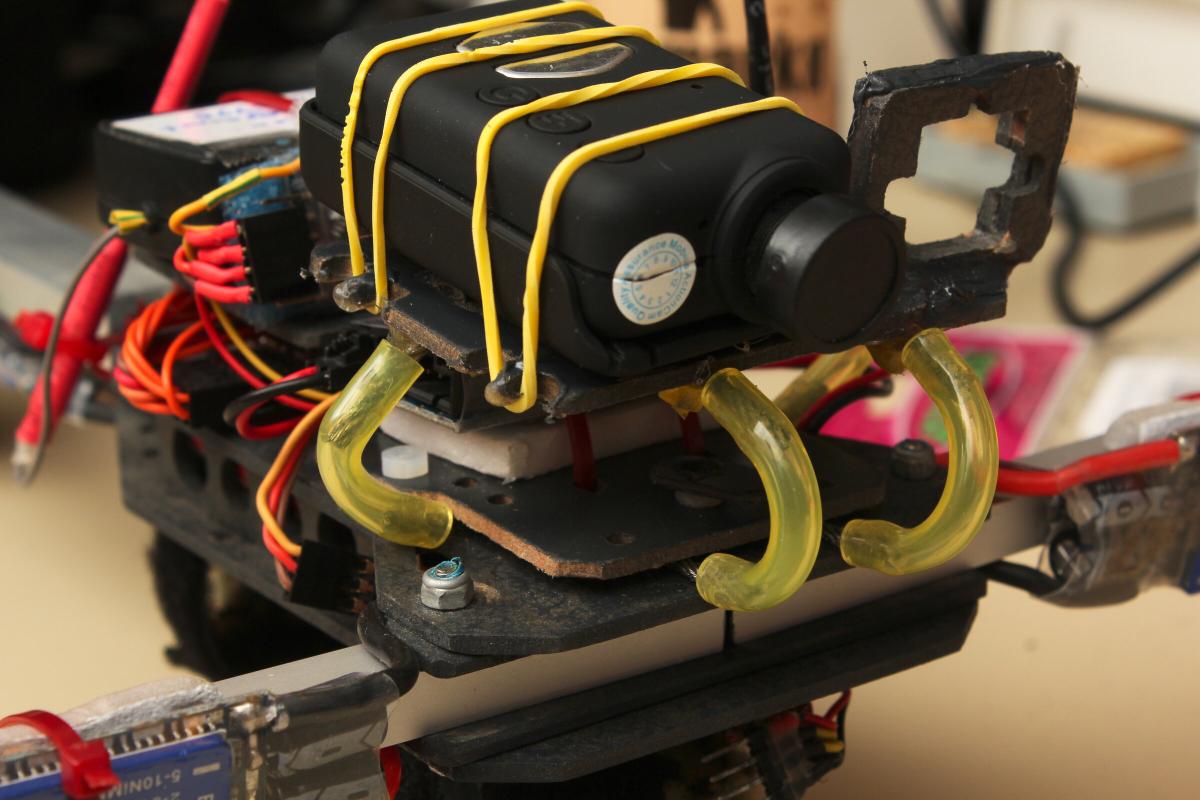
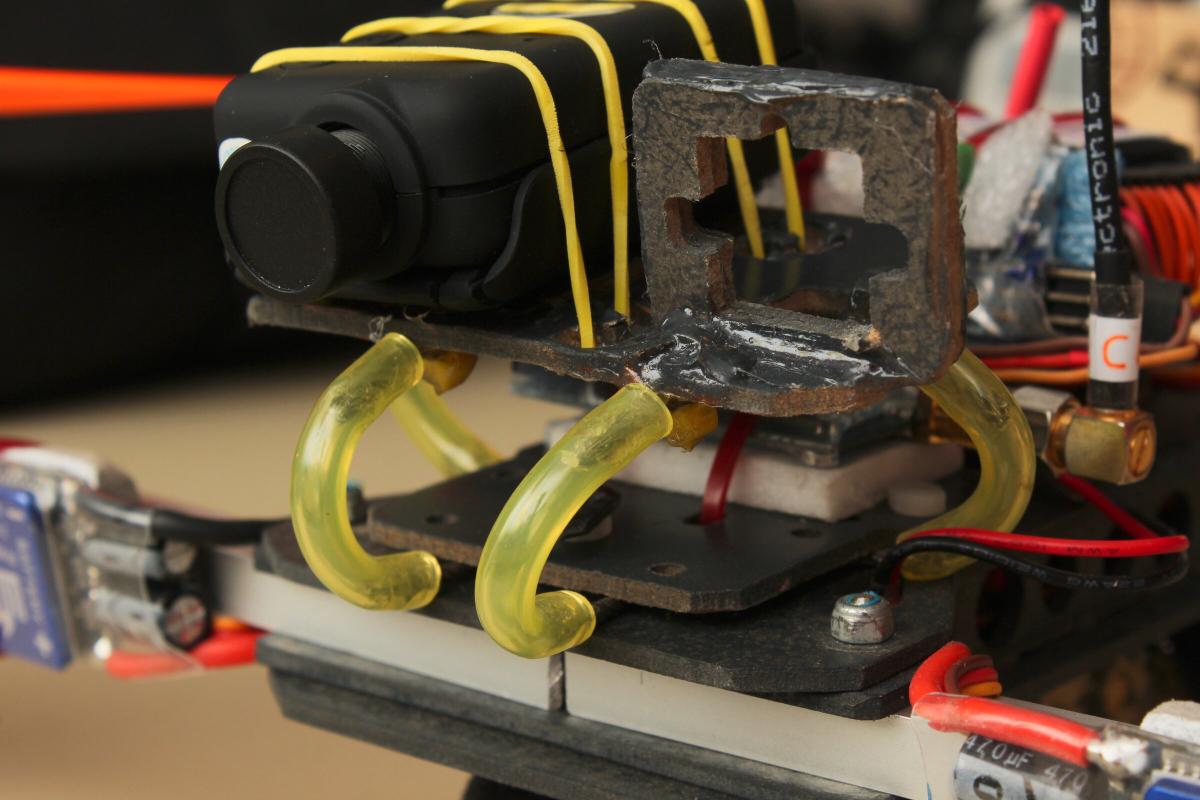
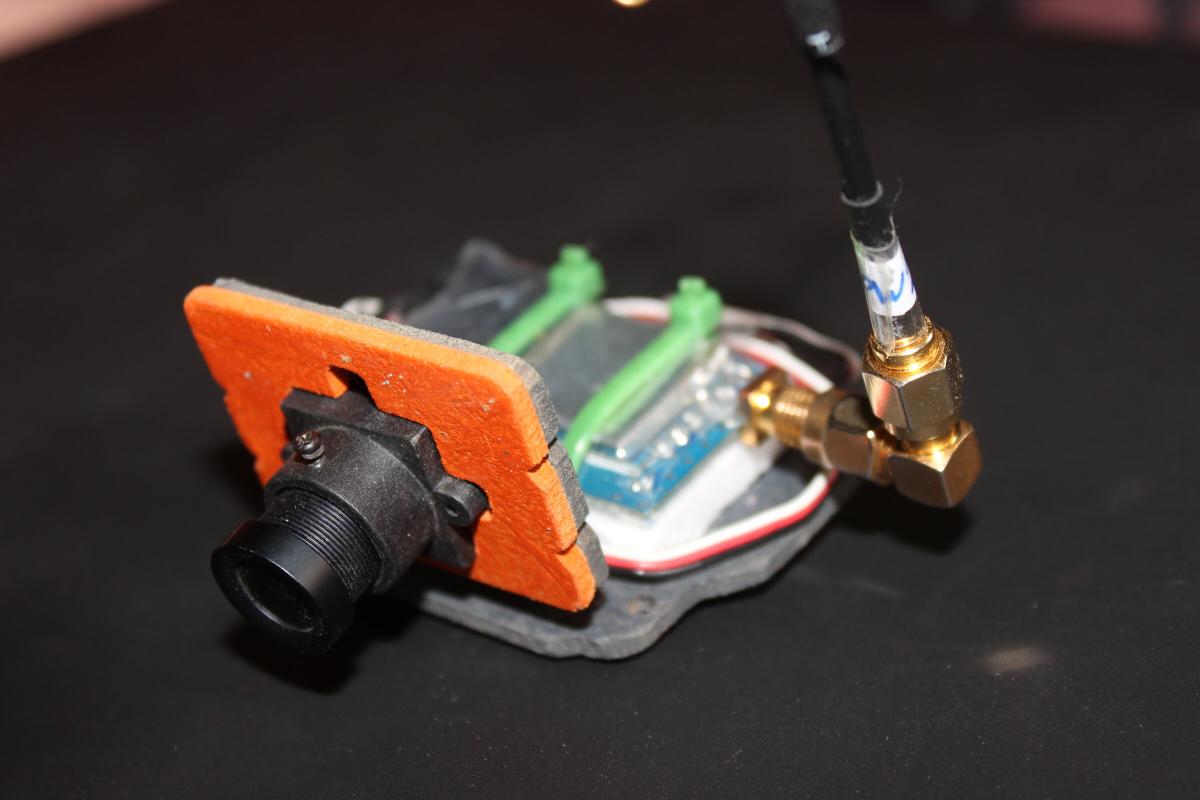
Damit sich die Vibrationen des Copters nicht allzu sehr auf die Kameras übertragen (Stichwort: Jello) wollte ich diese ähnlich dem “POV Camera Vibration Isolator” von rctestflight aufbauen.
Dazu hab ich zwei 1,5mm dicke Stahldrähte unter eine Holzplatte geklebt, auf welcher die Kameras ihren Platz finden.


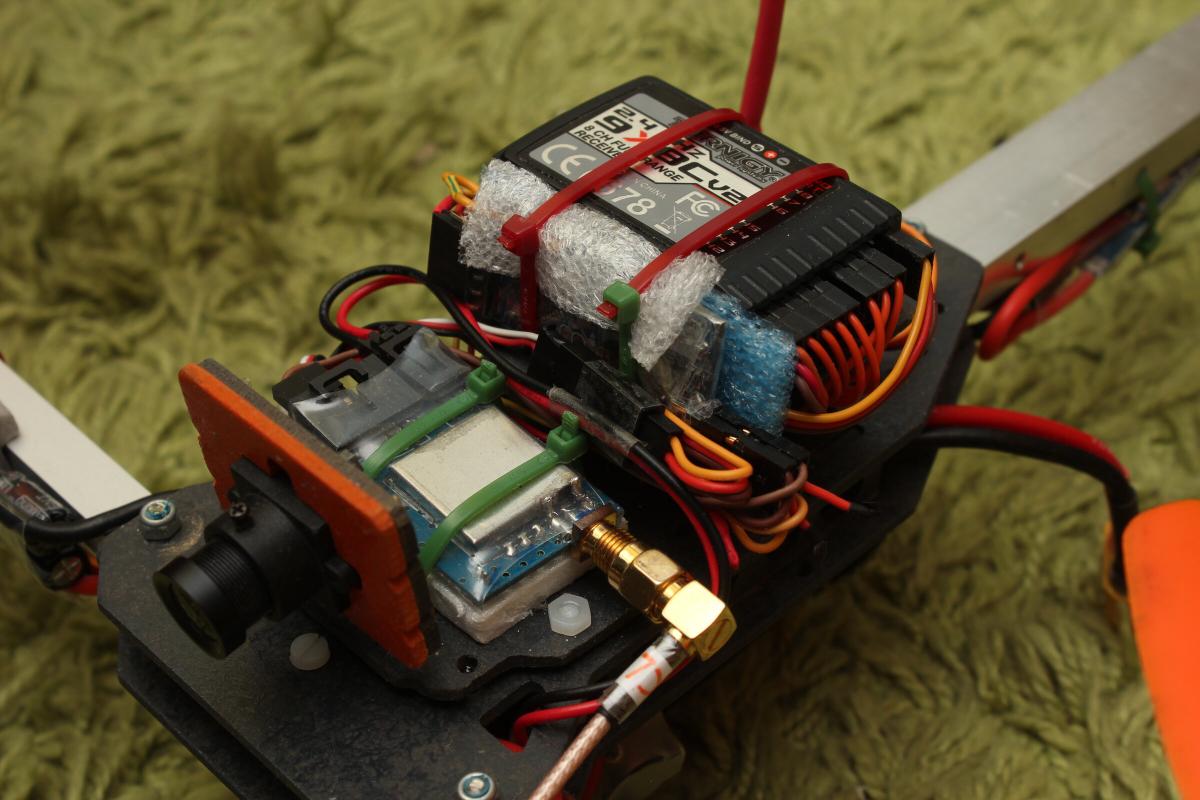
Die untere Platte wird wie zuvor auch schon auf den Copter geschraubt. Dadrauf wird der FPV-Sender gekabelbindert. Die beiden Drähte der oberen Platte werden unter die untere Platte geklemmt. Durch lockern der Schrauben kann somit der Neigungswinkel nachträglich eingestellt werden.
Mobius drauf und ab dafür. Bei dem ersten Testflug konnte ich zwar bei genauem Hinsehen noch leichte Vibrationen wahrnehmen, dennoch ist es um Längen besser als eine direkte Befestigung. Eventuel funktioniert die Dämfung besser, wenn die zu stabilisierende Masse größer ist. Bei manchen Coptern befindet sich der Akku sogar mit auf der Dämpfungsplatte.
Update 10.8.2014: Für die Mobius sind die 2mm dicken Stahldrähte doch etwas zu unbeweglich, wesswegen ich diese abgeknippst und durch Silikonschlauch (3mm innen, 5mm aussen) ersetzt hab. Jello ist nun Vergangenheit!