Tricopter KKMulticontroller
Juni 2012
Inhaltsverzeichnis
- Übersicht
- Tests und Testaufbau
- Prototyp
- KKMulticontroller
- Testflüge
- Aufbau
Selbstverständlich kann ein Copter auch ohne Stabilisierung geflogen werden, was allerdings sehr viel Können, Konzentration und Übung erfordert und einiges an Lehrgeld mehr kostet.
Durch Gyros zwischen Receiver und Motoren lässt sich einiges an Stabilität gewinnen.
Jedoch mit einer Steuerung, welche die Geschwindigkeiten der Motoren intelligent anpasst kann ein Copter wie angenagelt (selbst bei Wind) in der Luft stehen.
Dazu gibt es viele Lösungen, günstige wie auch unglaublich teure Kaufboards.
Ich entschied mich für den kkMulticontroller, welcher auf einem einfachen und preisgünstigen Atmega basiert.
Zudem kann das Board mit einem Wii Motion Plus verbunden werden, wodurch sich das Geld für die drei einzelnen Gyros sparen lässt.
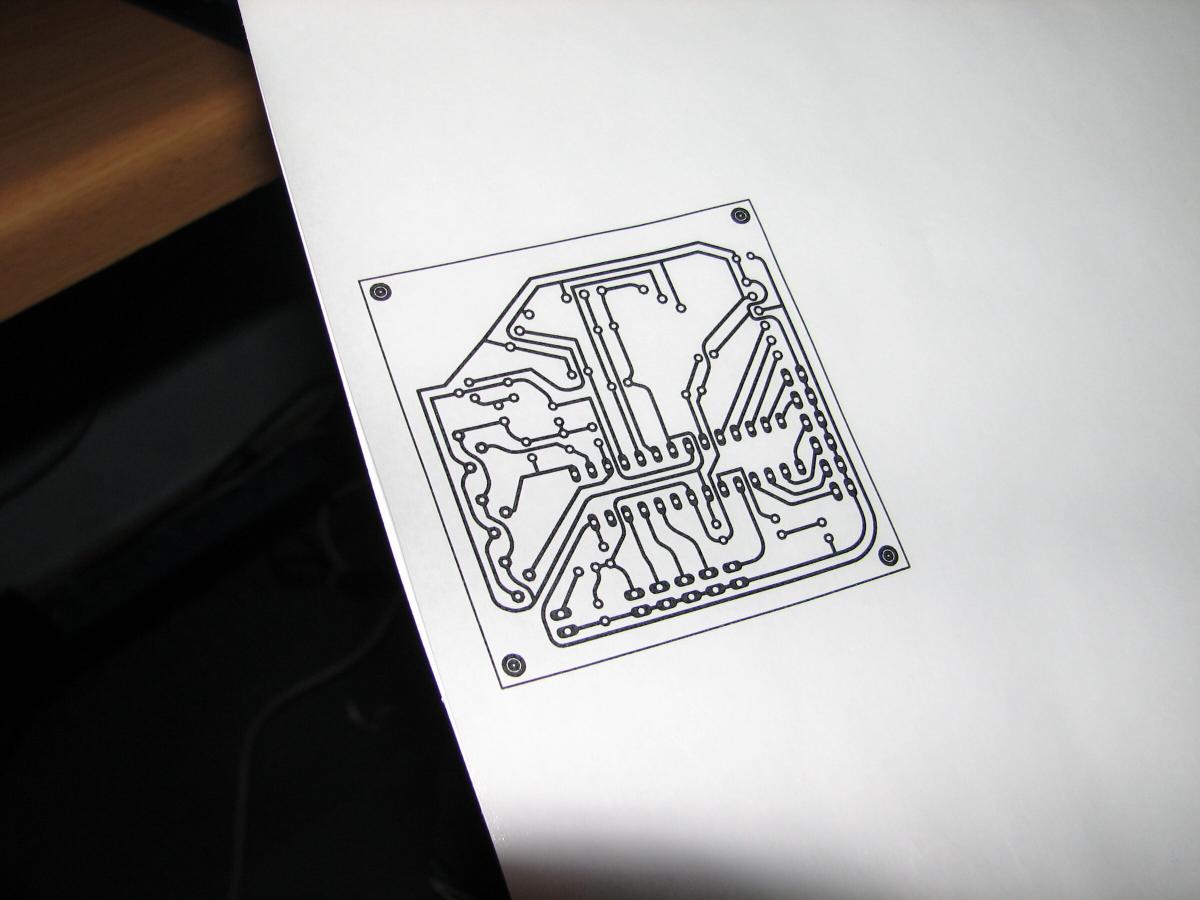
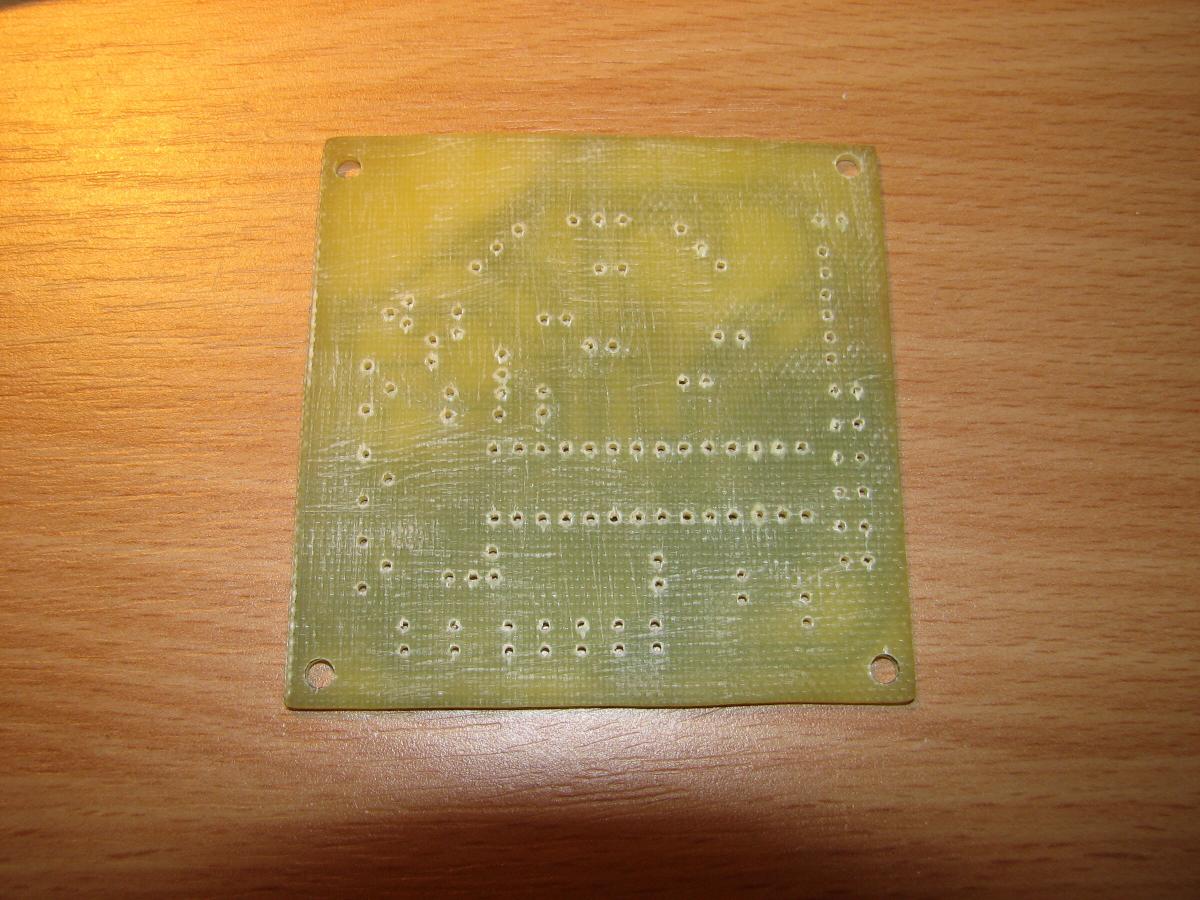
An aller Anfang steht wieder einmal die Platine. Da ich noch nicht viel Erfahrung mit doppelseitigen Platinen hatte gab es zum Glück ein Singe-Side PCB.
Die Vorgehensweise zum Ätzen einer Platine hab ich ja bereits beschrieben.
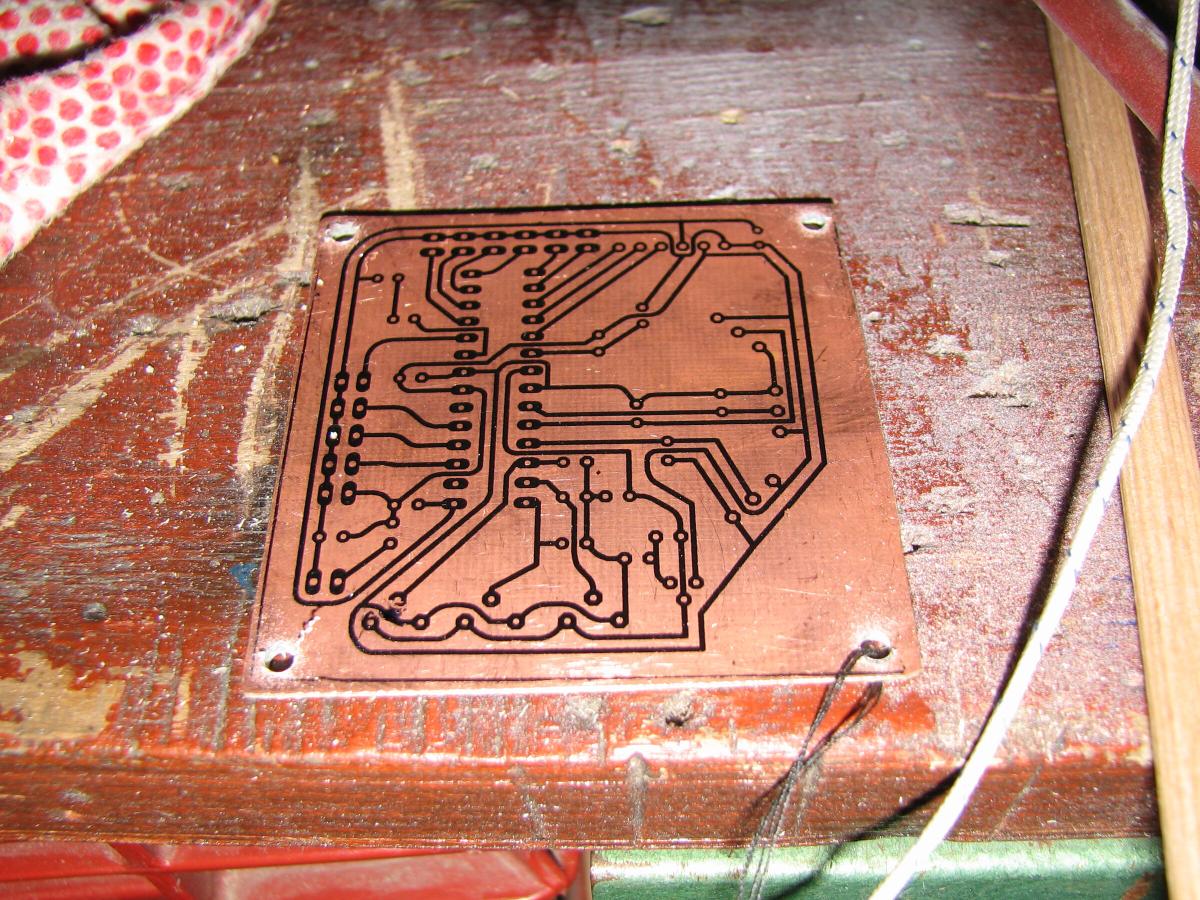
Auf eine beschichtete Folie laserdrucken und per Tonertransferverfahren mit einem gemoddeten Laminator auf eine Kupferplatine “kopieren”.

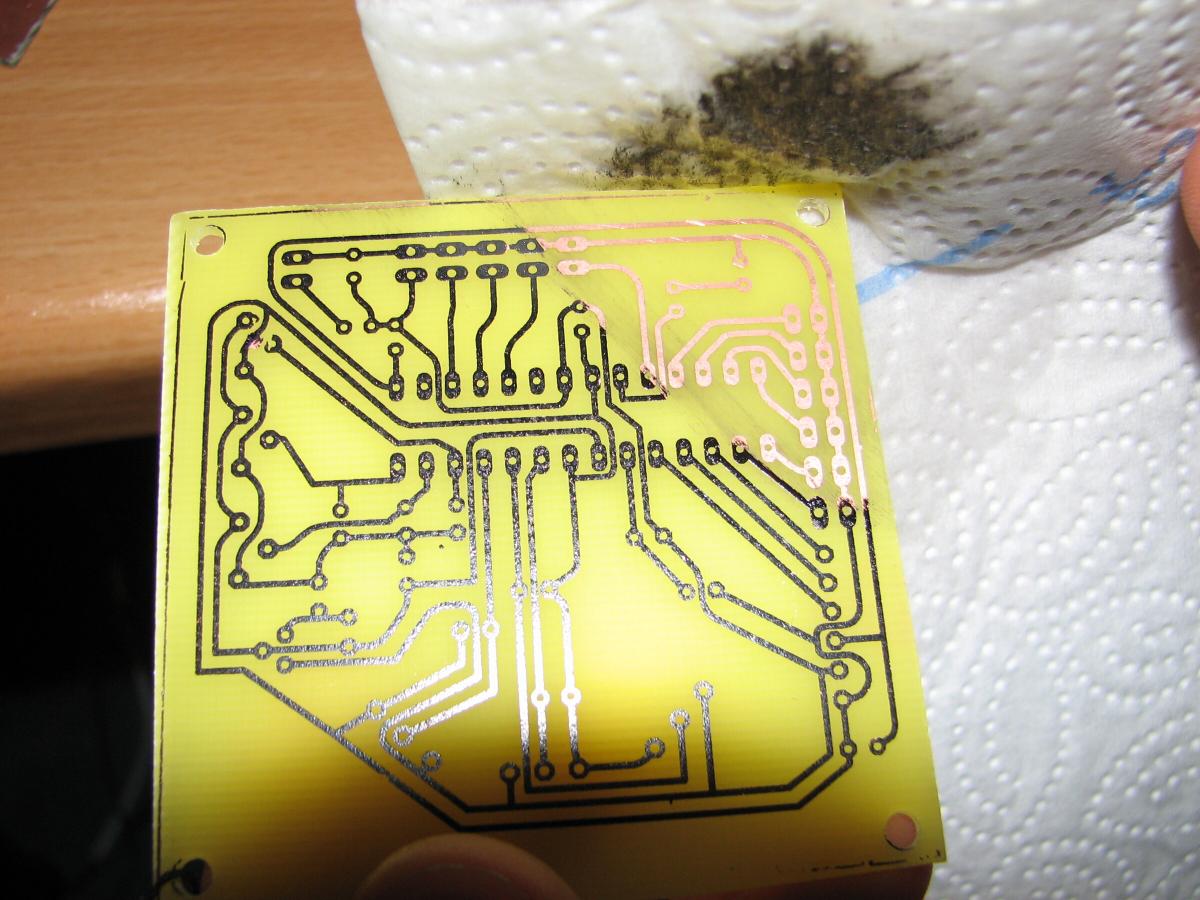
Die Platine anschließend im ungesunden Natriumpersulfad-Bad ertränken und abwarten.

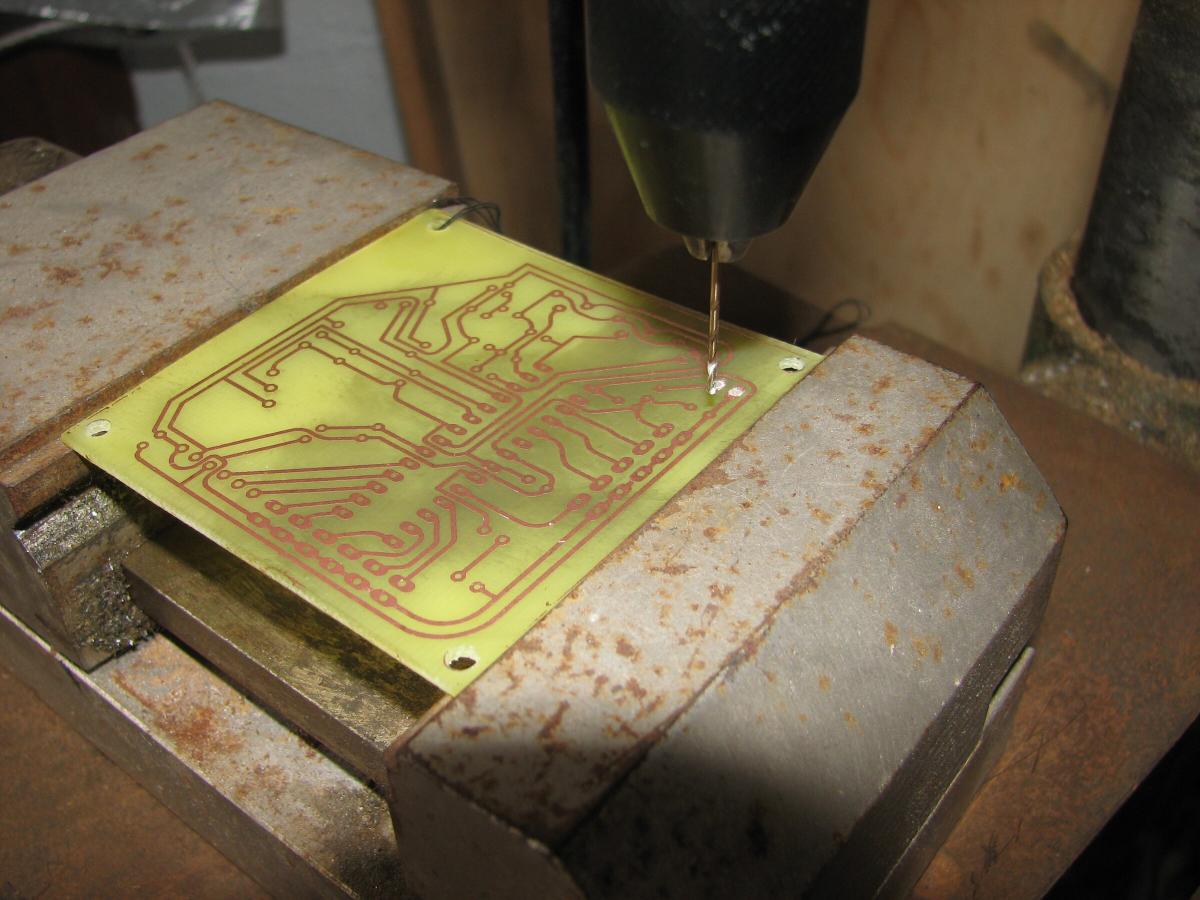
Danach mit etwas Aceton den schwarzen Toner abwischen und die Löcher mit einem 1mm Bohrer bohren.
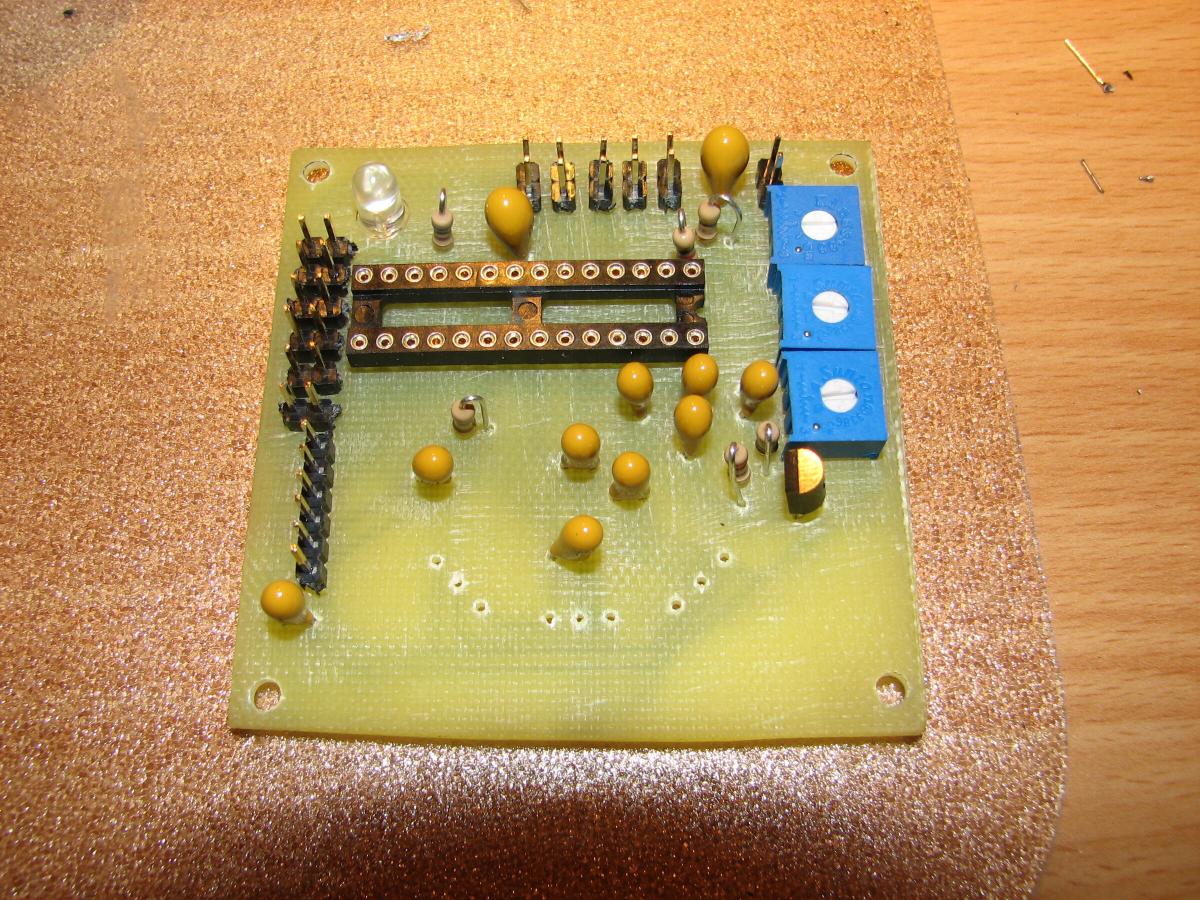
Die Platine dann wie im Layout und Schaltplänen eingezeichnet bestücken. Dabei ist für den Betrieb mit einer Wii MP als Gyro der Widerstand R10 mit 68 Ohm durch einen mit 220 Ohm zu tauschen, da die Wii-Gyros eine geringere Referenzspannung benötigen.
Den Original Wii Motion Plus Adapter hab ich mir gebraucht bei Ebay für ca. 8 € ersteigert.
Und was macht man mit gerade gekauften Sachen; natürlich erstmal aufschrauben.
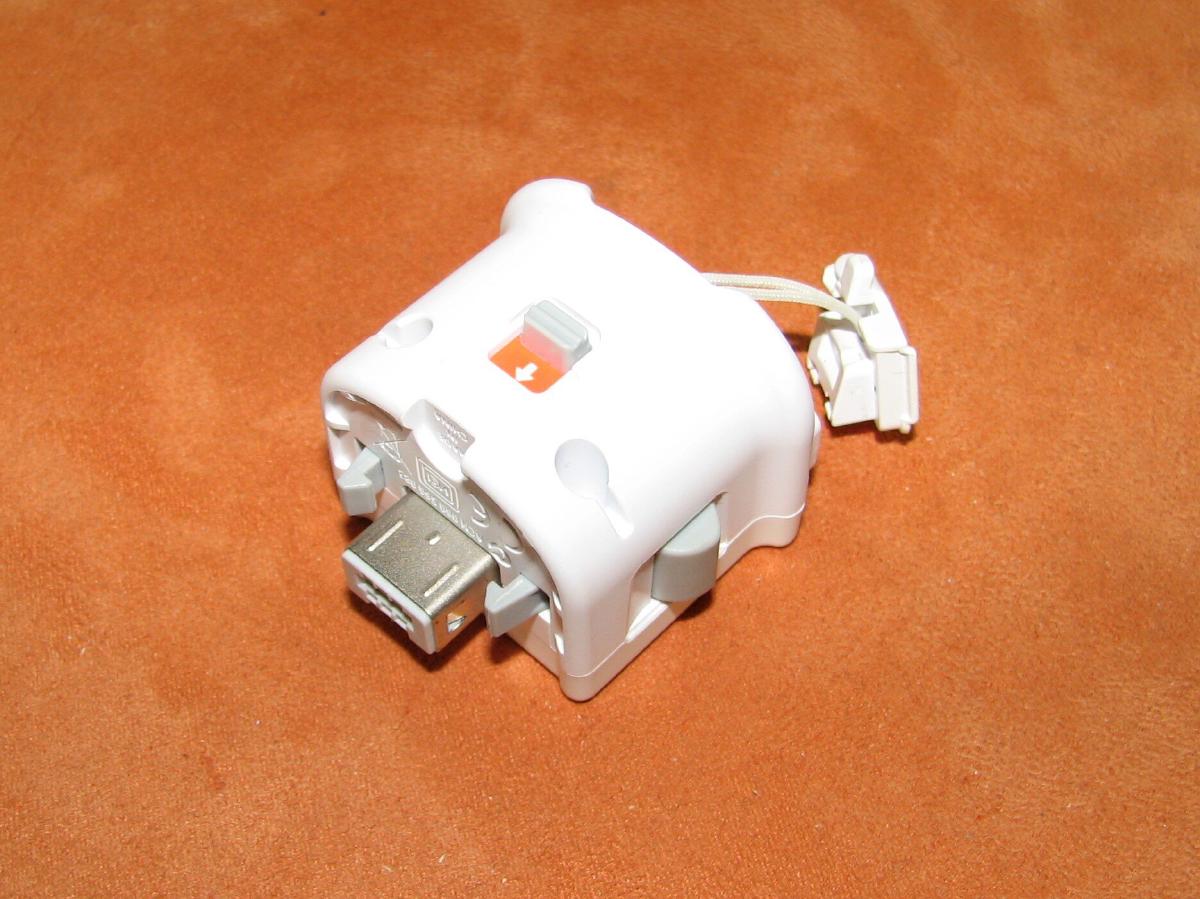
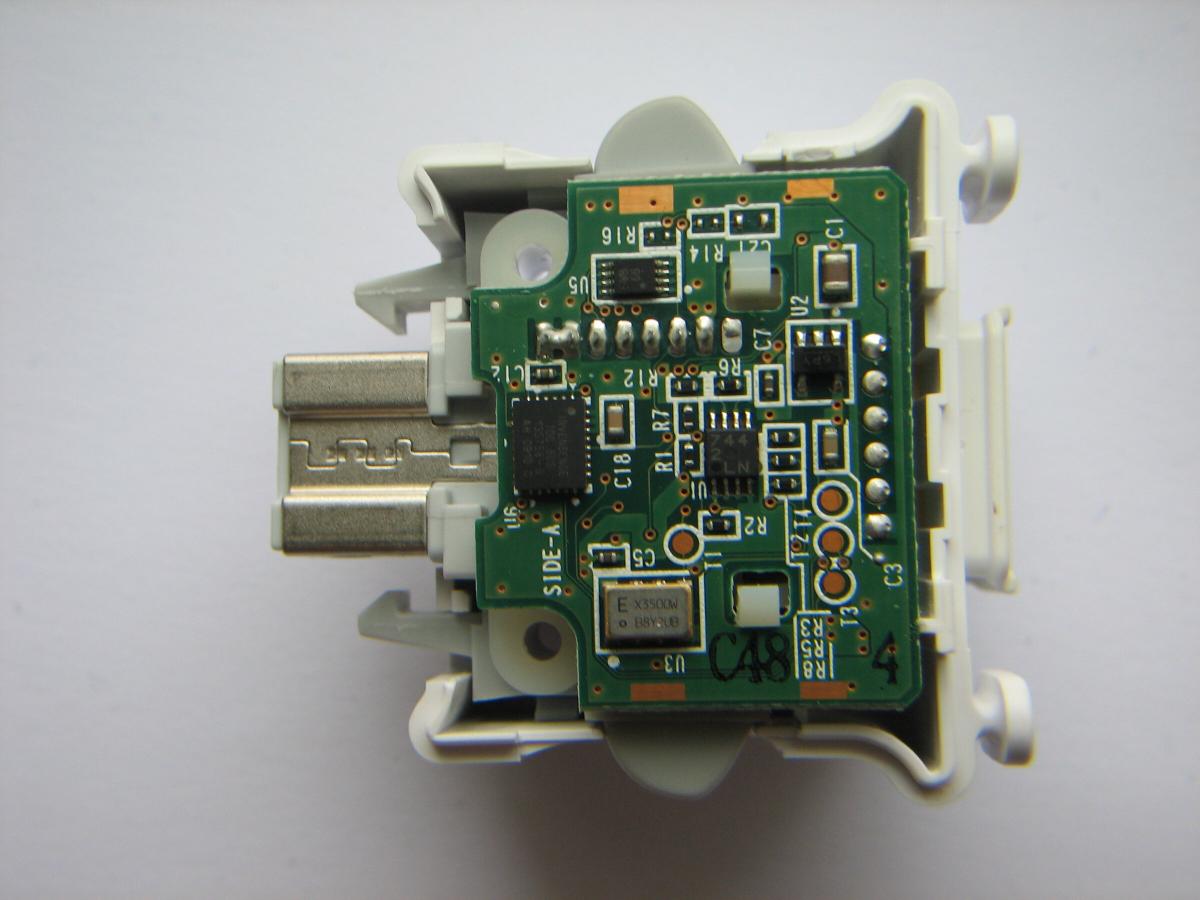
Viel ist in dem weißen Gehäuse nicht drin: zwei Stecker und ne kleine SMD-Platine

Leider kann man den Adapter nicht einfach über einen der vorhandenen Stecker anschließen.
Ich wollte jedoch nicht auf die praktischen Stecker verzichten und hab diese zum Verbinden der kkMulticontrollerplatine mit dem Wii MP weiterverwendet.
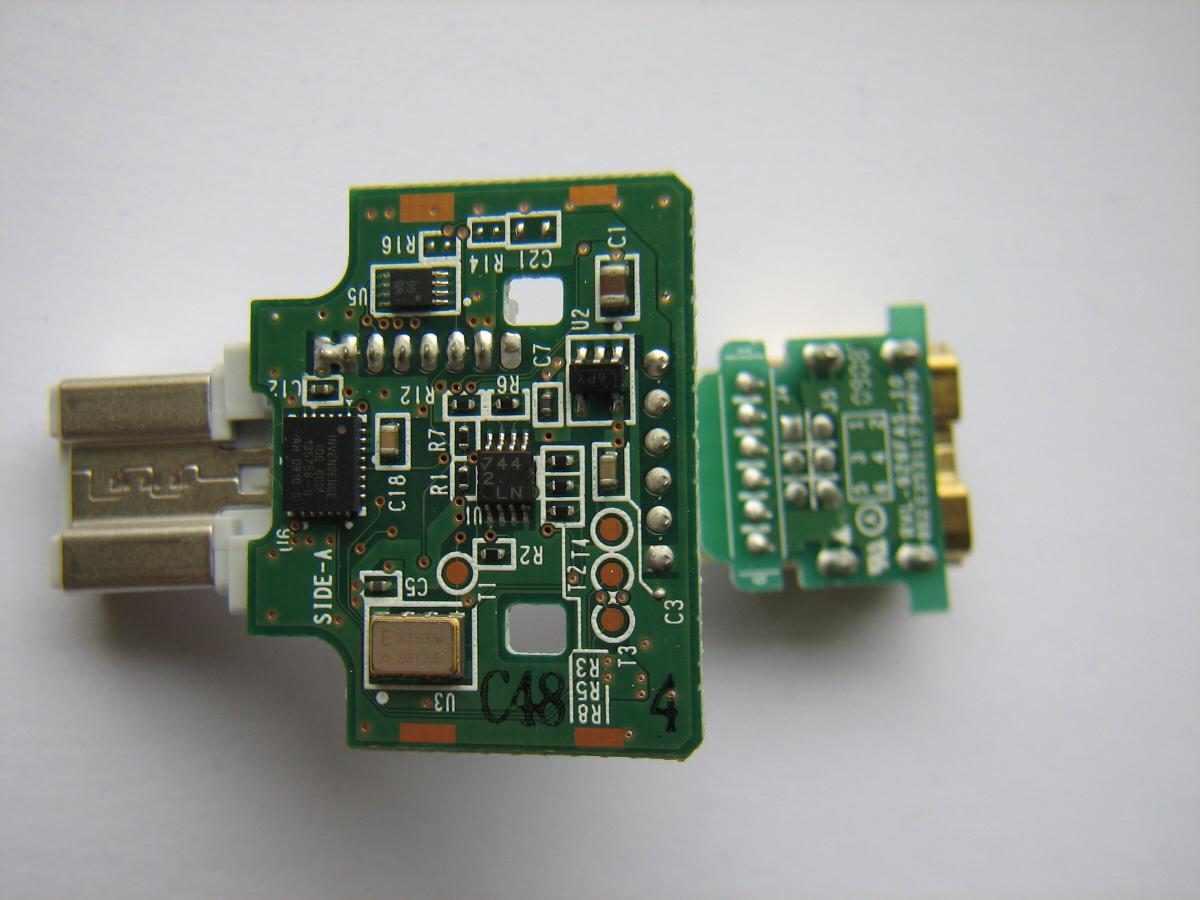
Vorher muss man allerdings wissen, welche Kontakte man anzapfen muss. Bei meinem Original Wii MP sieht die Rückseite so aus.
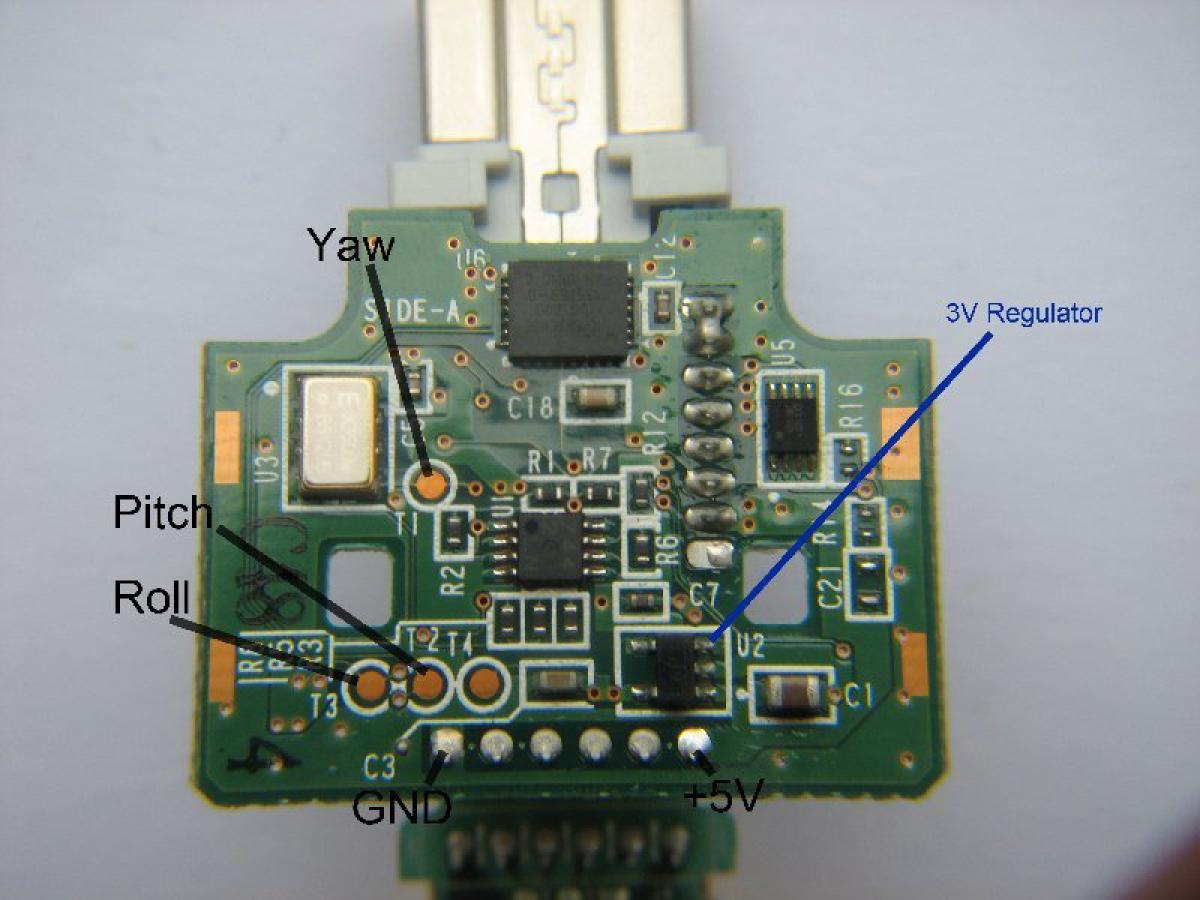
Für Roll, Pitch und Yaw lötet man einfach drei der vorhandenen Pads an, GND und die 5V Spannung legt man an die äußeren Pins der unteren Lötkontakte.
Zudem muss noch eine Brücke von +5V richtung 3V Regulator IC gelötet werden. Dazu einfach ein kurzes Stück Draht zum Kontakt links neben dem “V2”. Dadurch wird der 3V Spannungsregler aktiviert (Bitte korrigieren falls ich falsch liege).
Wie gesagt wollte ich den Wii-Stecker weiterleben lassen, also hab ich die Kabel von dem Stecker abgeknippst und an die besagten Stellen gelötet.
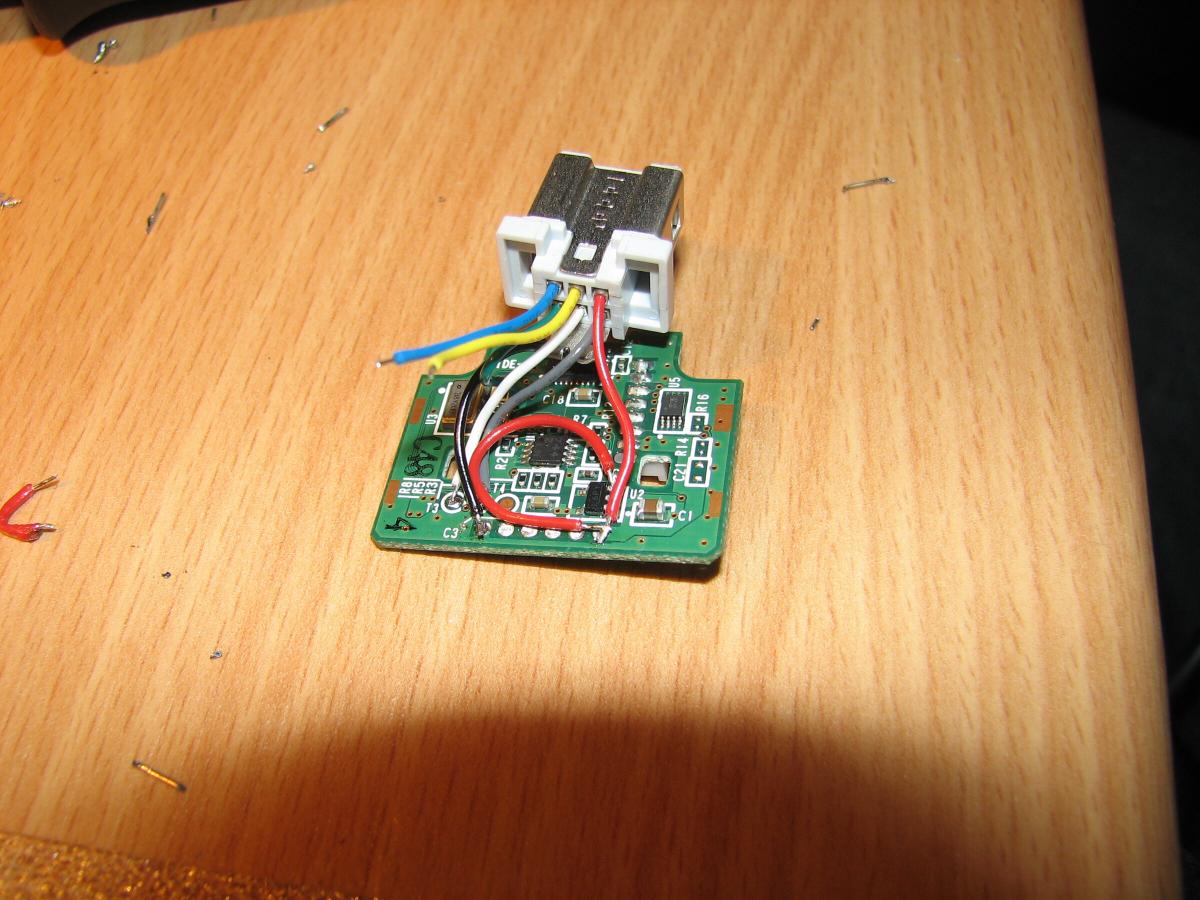
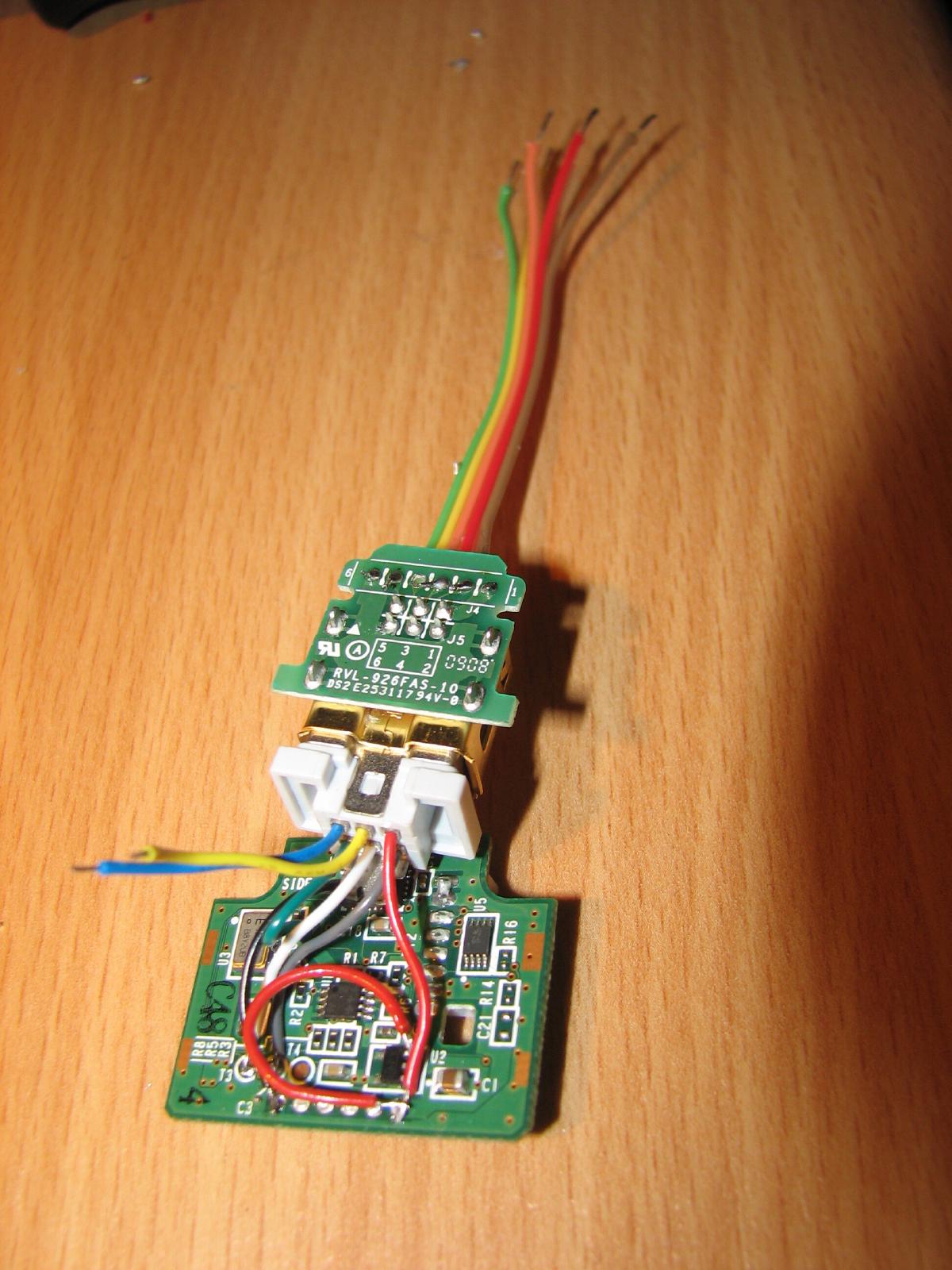
Die Wii-Buchse wird dann entsprechend an der kk-Platine angebracht.
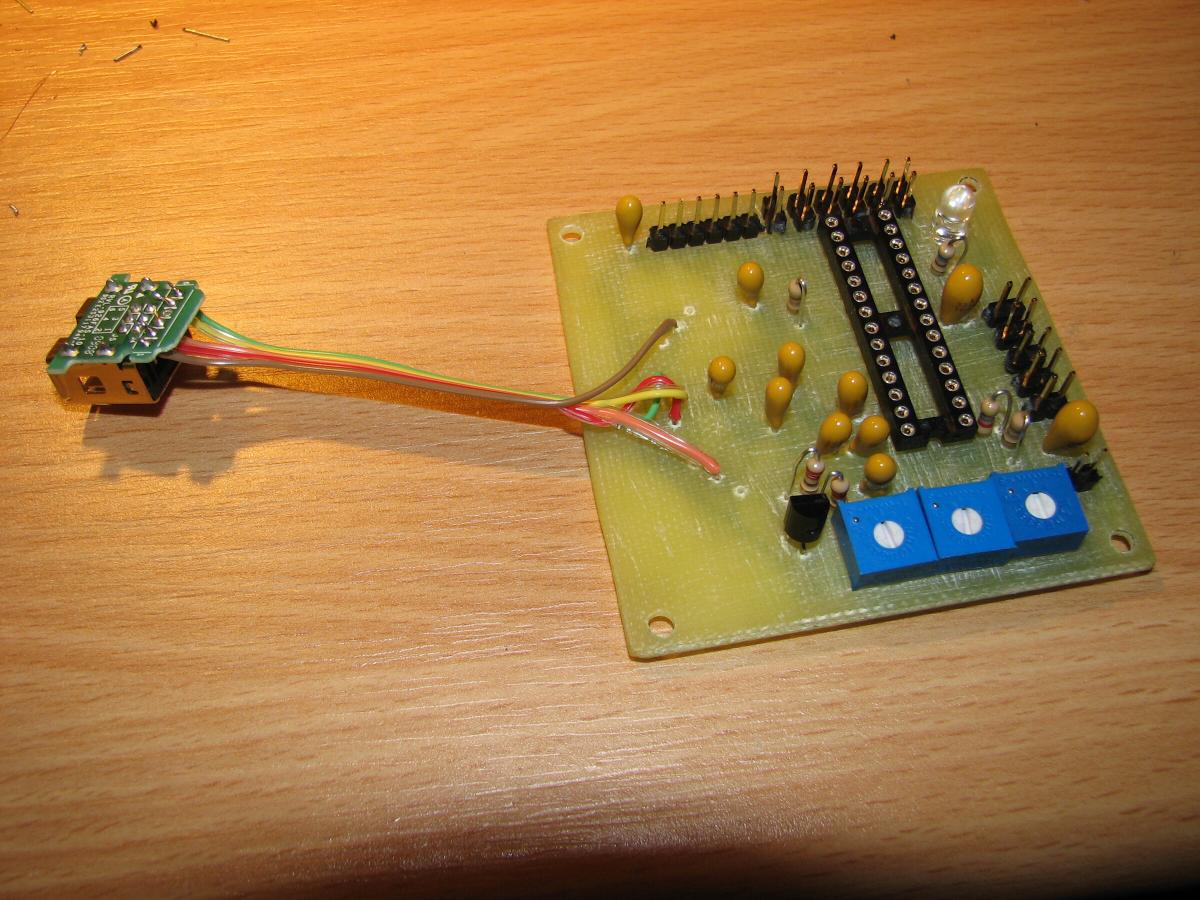
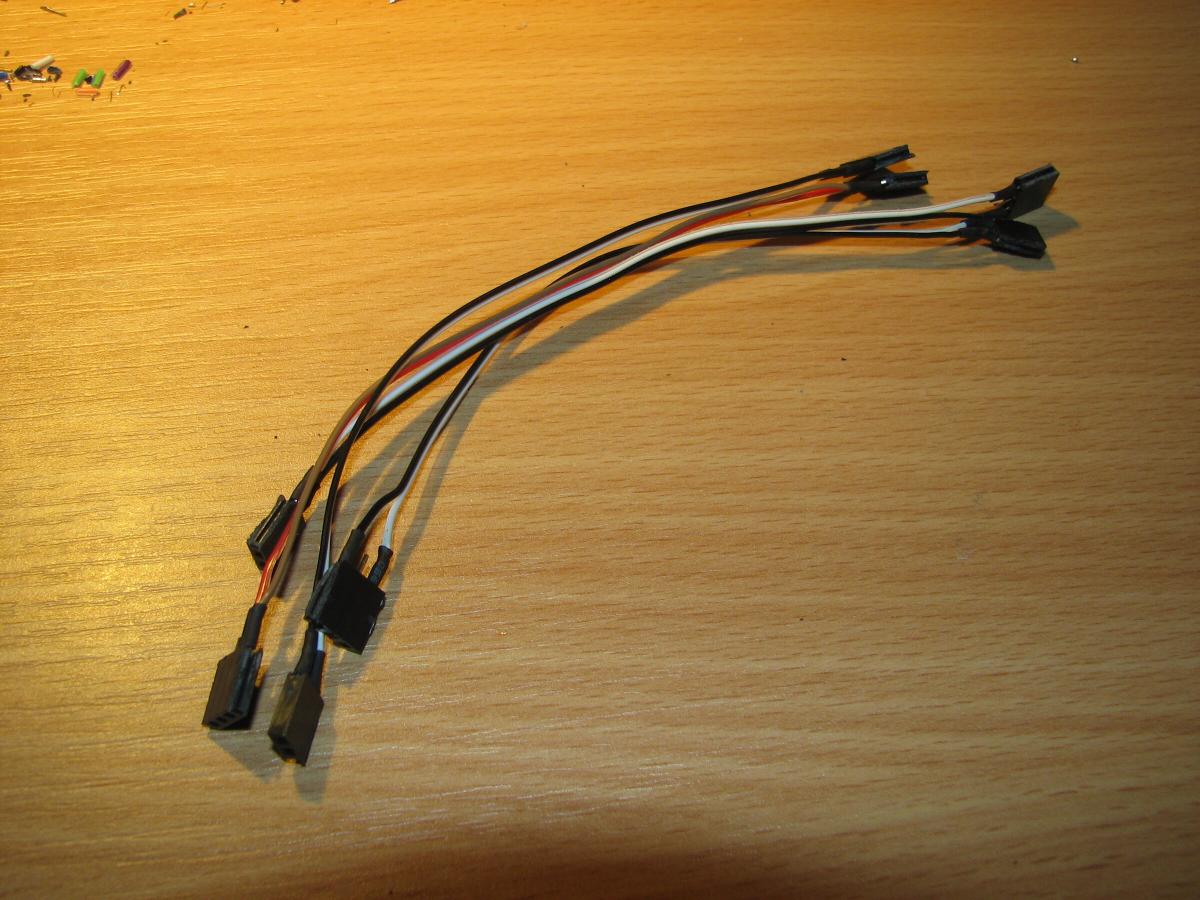
Was ich bei dem Single-Side Layout noch nicht verstanden hab ist, warum die Steckkontakte für Receiver und ESC/Servo so mies belegt sind. (Standard ist Masse, 5V, Signal)
Was solls, hab ich mir halt Adapterkabel gelötet. An den Stecker direkt neben den Potis kommt die 5V Spannungsversorgung. Dabei habe ich im Nachhinein nur ein BEC (die ESC’s haben jeweils ein internes BEC) mit dem Controllerboard verbunden, also die Roten +5V Leitungen der anderen zwei gekappt und nur Masse, sowie Signal verbunden. Ich entschied mich dazu, da ich in diversen Foren von Problemen in diesem Zusammenhang gelesen hab.
Die 5 doppelpins neben dem Kondensator sind für die Verbindung mit dem Receiver. Der Linke (der neben dem Kondensator) versorg den Receiver mit der 5V Spannung. Die restlichen 4 Stecker sind für Aileron, Elevator, Throttle und Rudder. Die Belegung sollte man vorher mit anderen Layouts vergleichen.


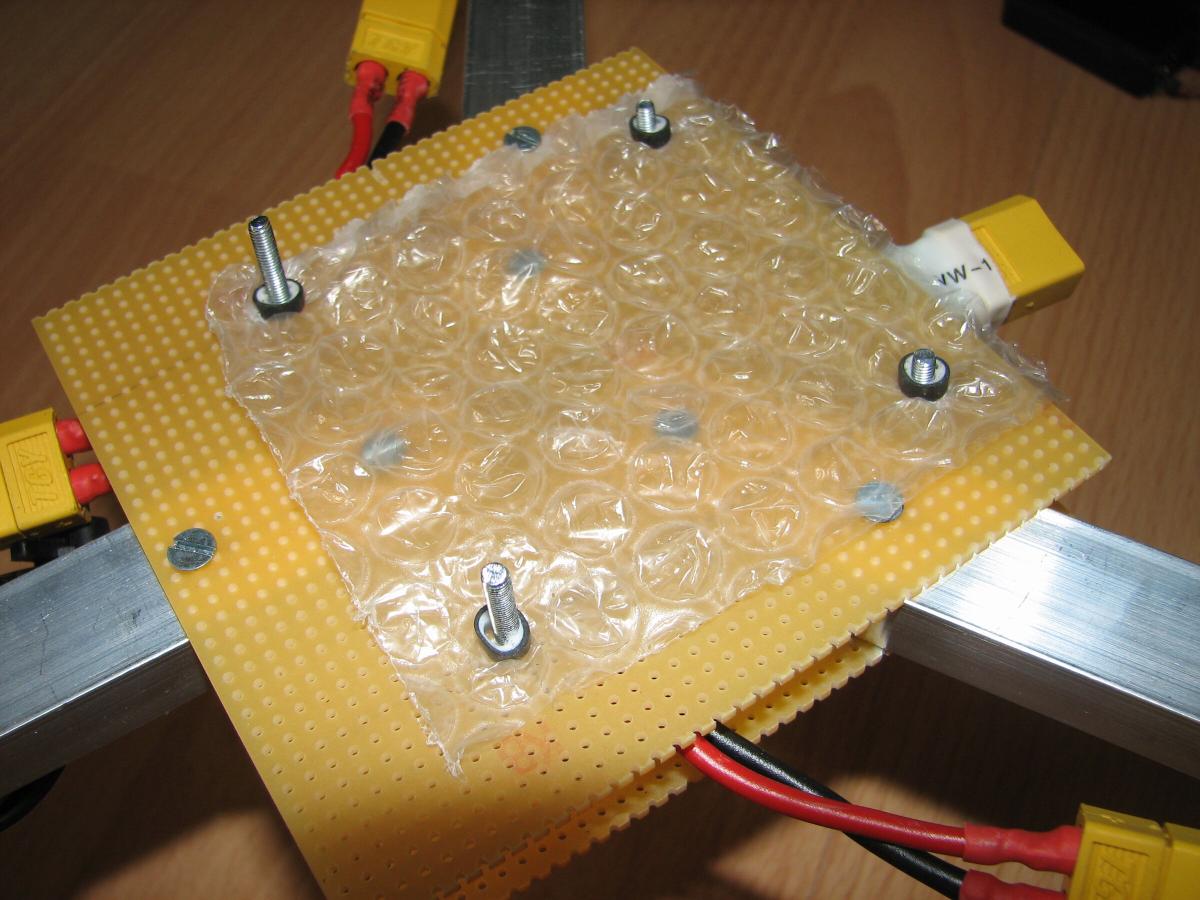
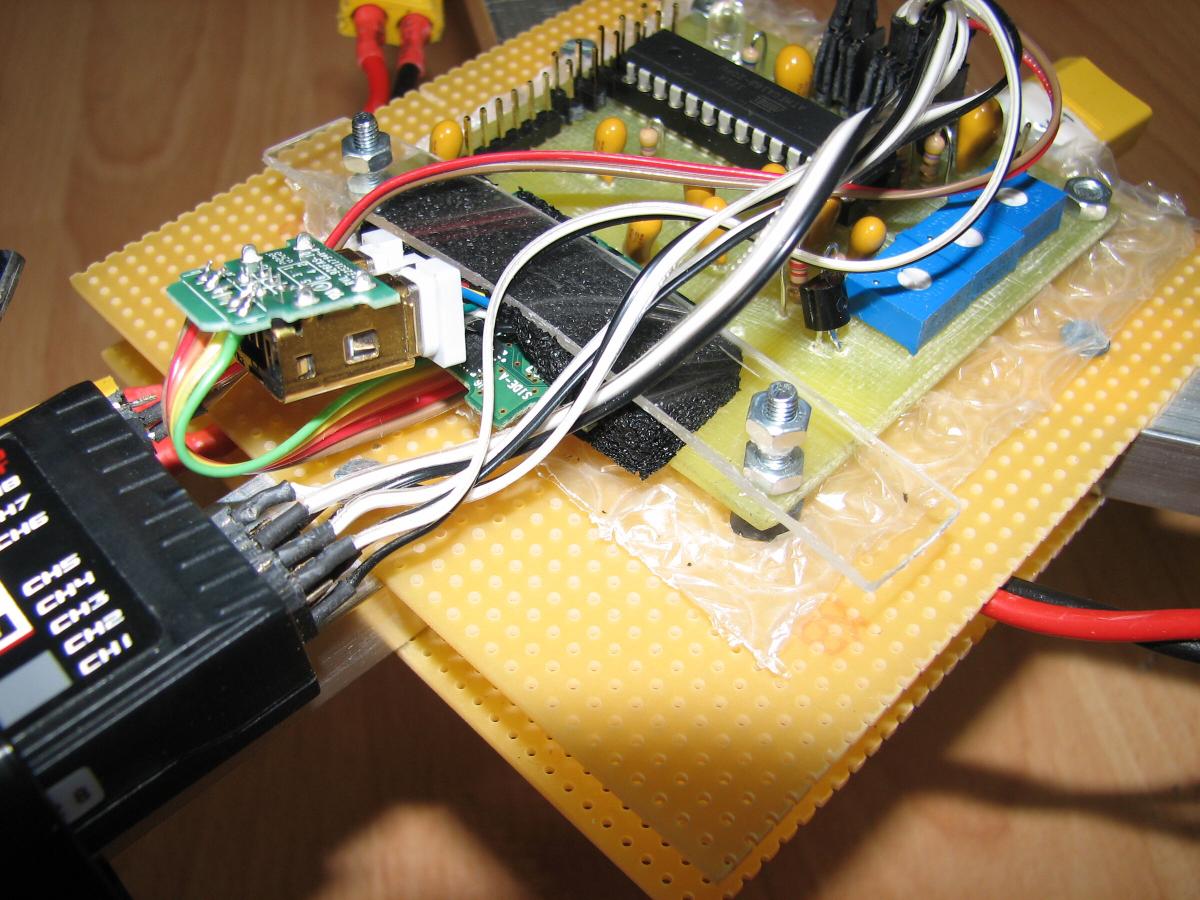
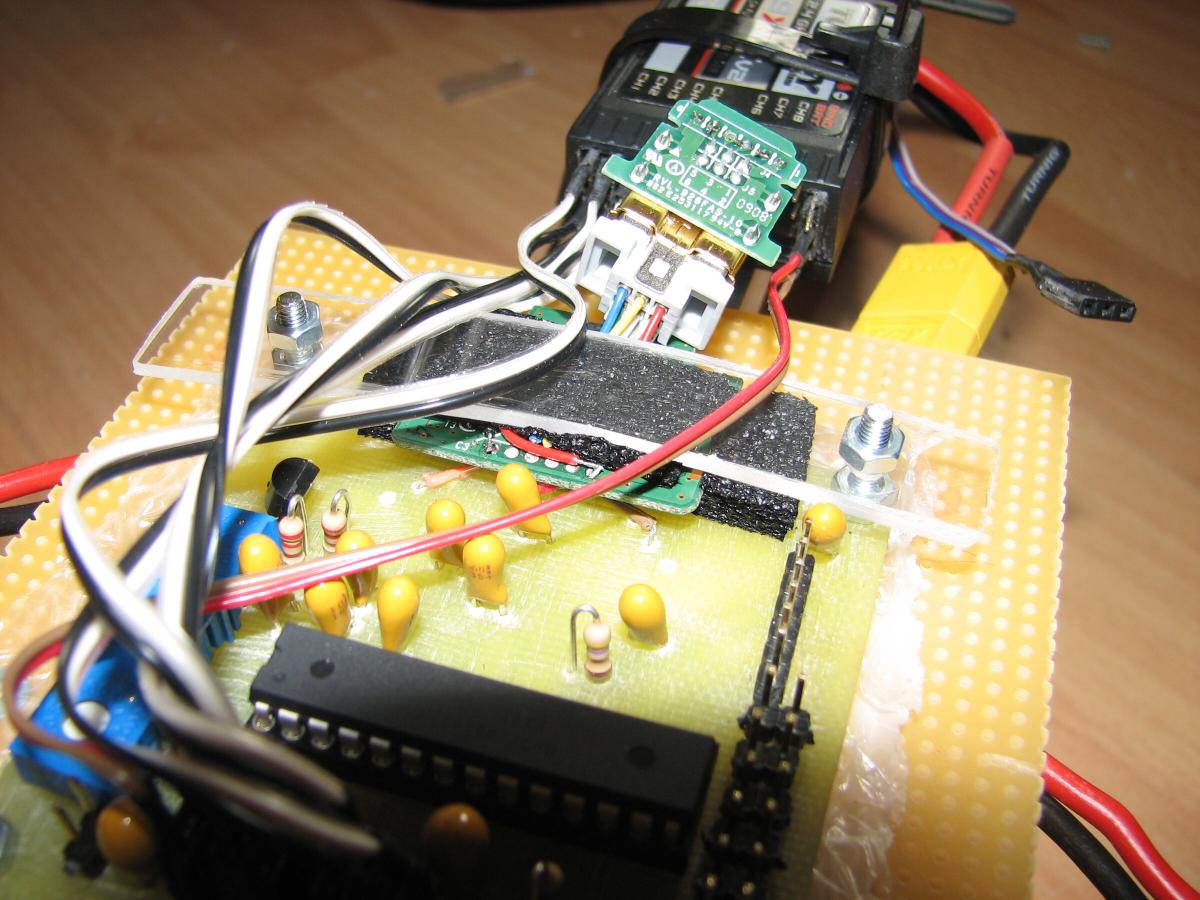
Als nächstes kommt das Board auf die Centerplate des Protoypen. Eine Folie als provisorischen Kurzschlussschutz und Kabelisolierungen als Abstandshalter kommen zwischen Platine und Centerplate.
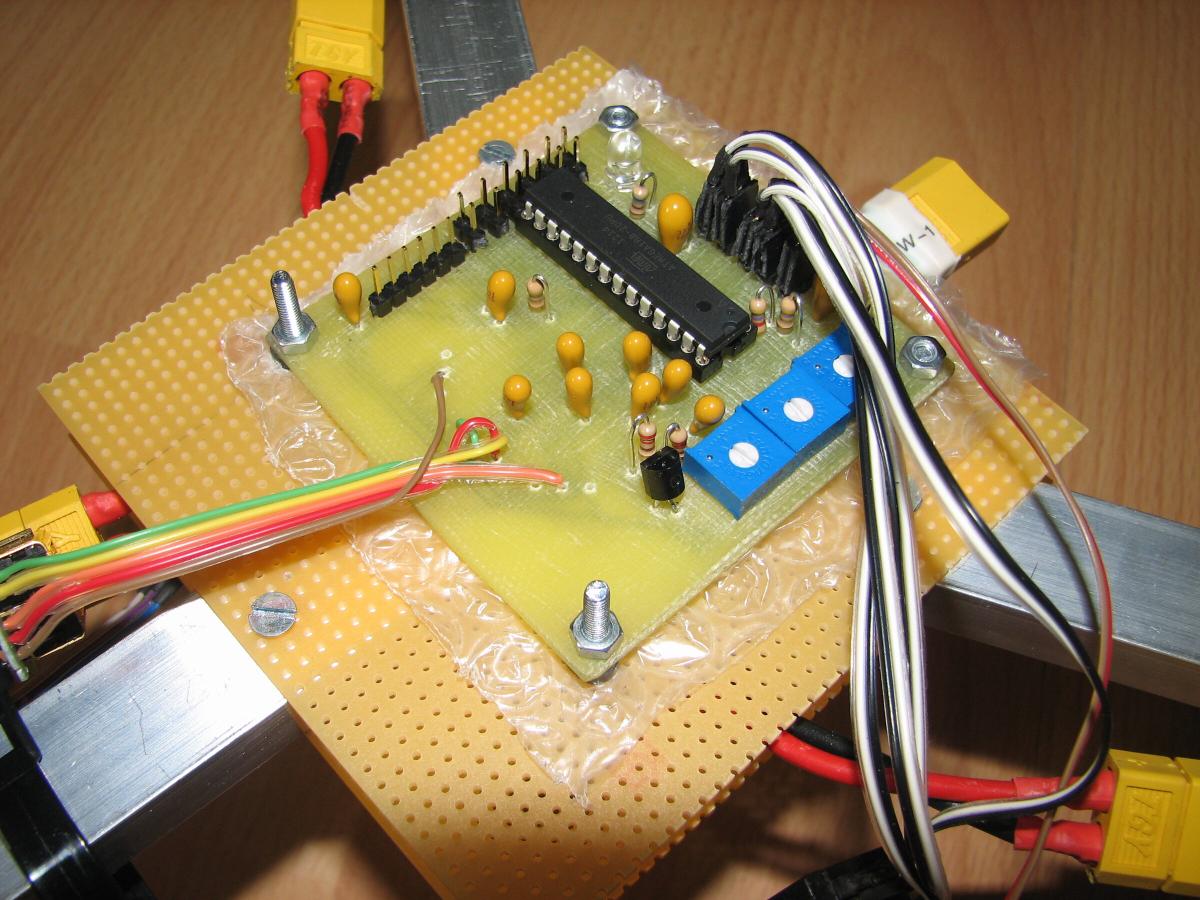
Was noch fehlt ist die Wii-Gyro-Platine welche ich mit einem Plexiglasstreifen und etwas Schaumstoff auf die Controllerplatine geklemmt hab.
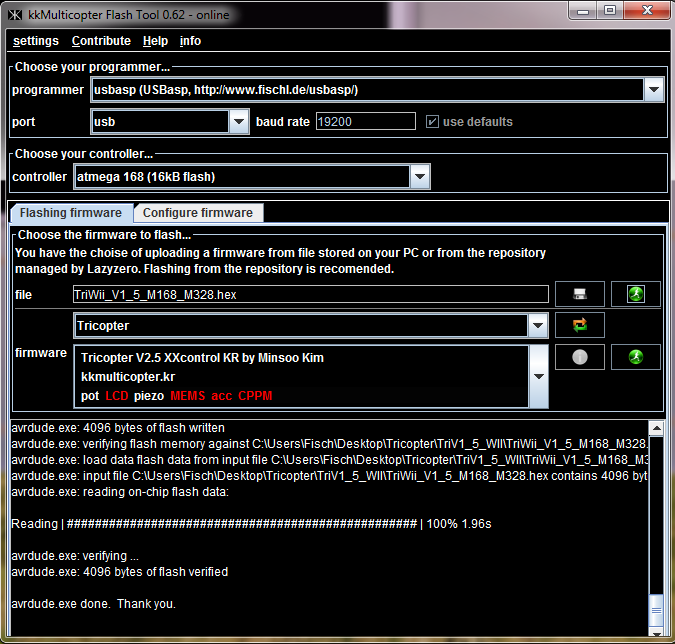
Die Firmware hab ich dann mit dem USBasp Programmer auf den Atmega 168 gebrannt. Die Firmware gibt es auf der kkMulticopter Seite, auch eine Optimierte für das Wii MP.
Zum Flashen der Firmware gibt es zudem ein nützliches Programm, welches sich “kkMulticopter Flash Tool” nennt. Hier meine Einstellungen, die Firmware hab ich als Datei gewählt.
Nach ersten kurzen Tests scheint das Ganze wohl zu funktionieren.
Zu den Testflügen hierlang.