Tricopter Prototyp
Juni 2012
Inhaltsverzeichnis
Da ich bis jetz (Juni 2012) so gut wie keine Erfahrung mit dem Flugmodellbau, geschweige denn Coptern, habe wollte ich nicht direkt teure Materialien wie Glas-/Kohle -faserkunststoff verwenden.
Der Tricopter Prototyp wird daher vorerst aus günstigen Baustoffen wie Alu, Holz etc. bestehen, welche im Laufe der Zeit durch bessere ausgetauscht werden.
Im Grunde besteh ein Copter nur aus den Armen und einer Centerplate, welche die Arme in der Mitte verbindet.
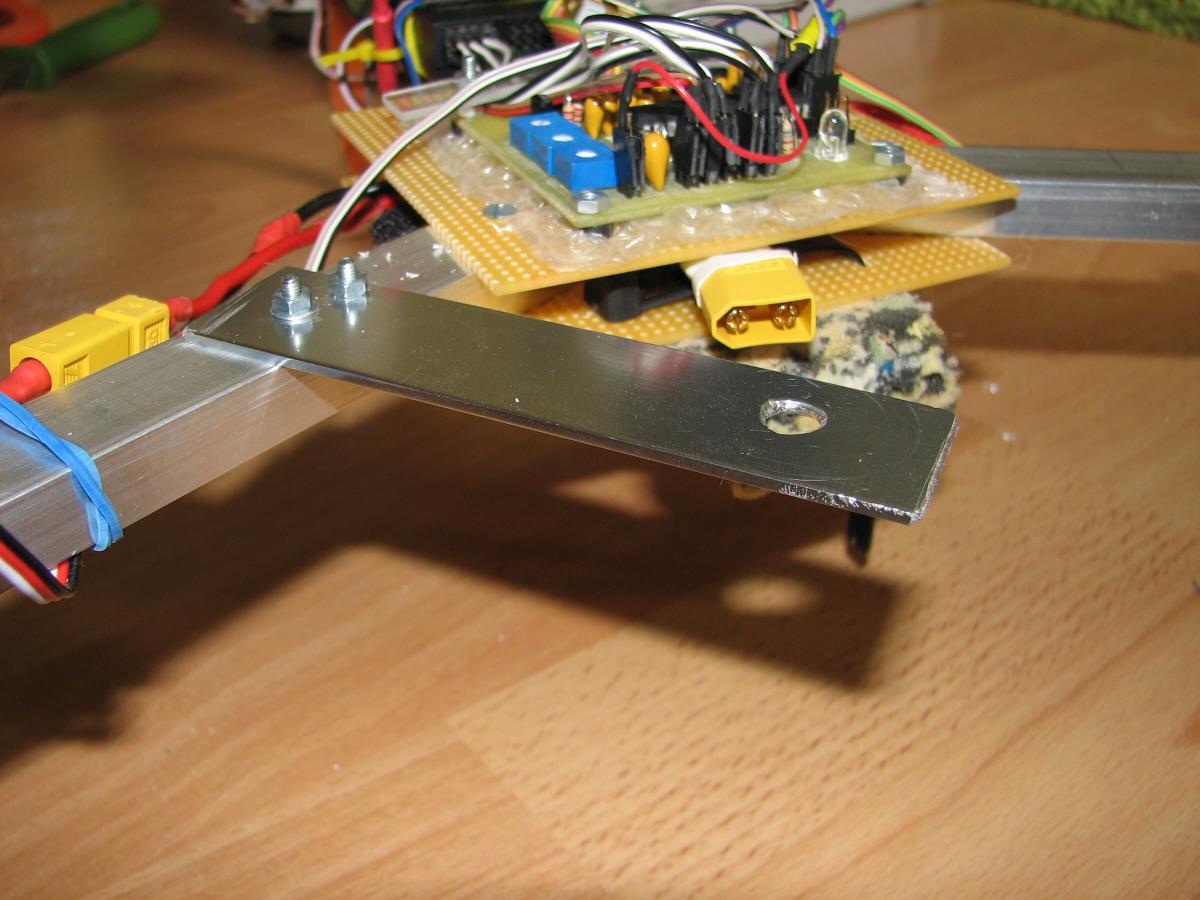
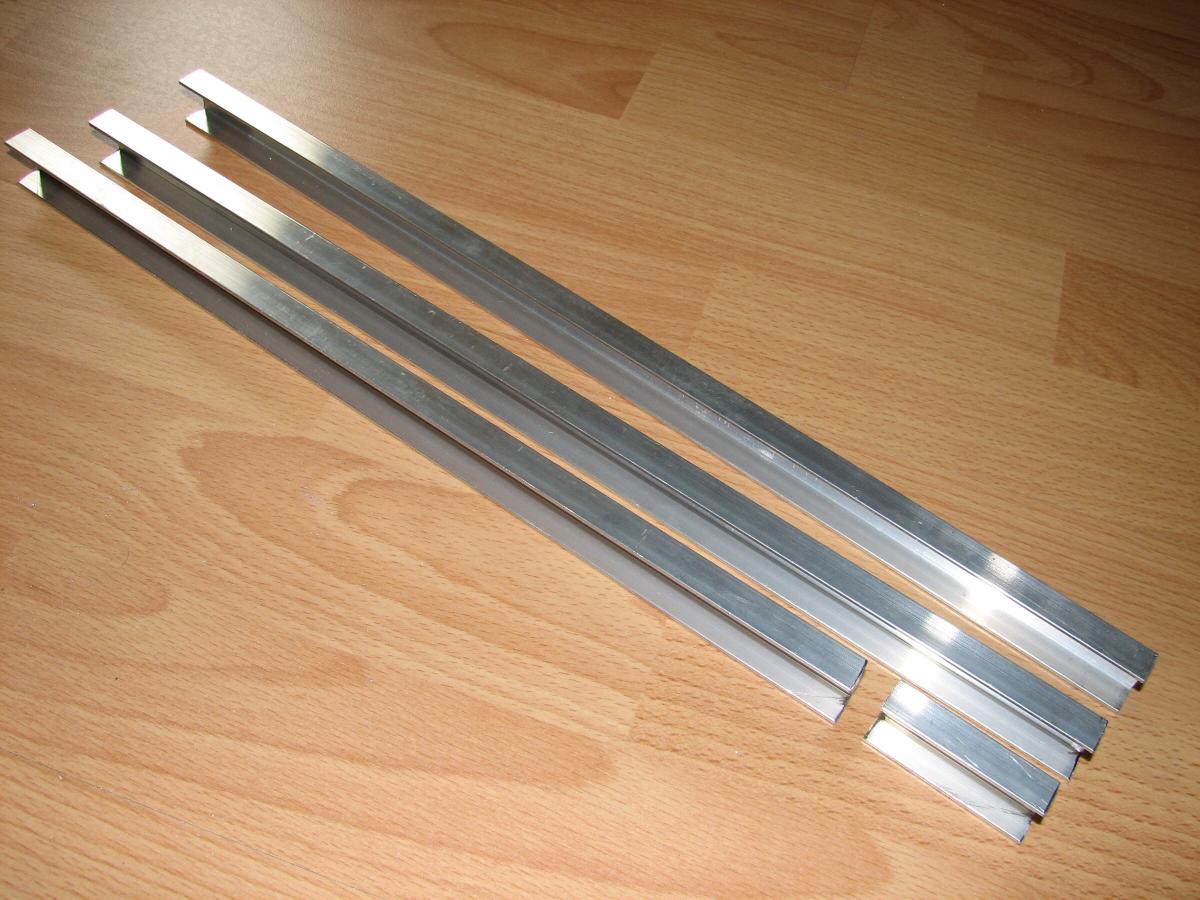
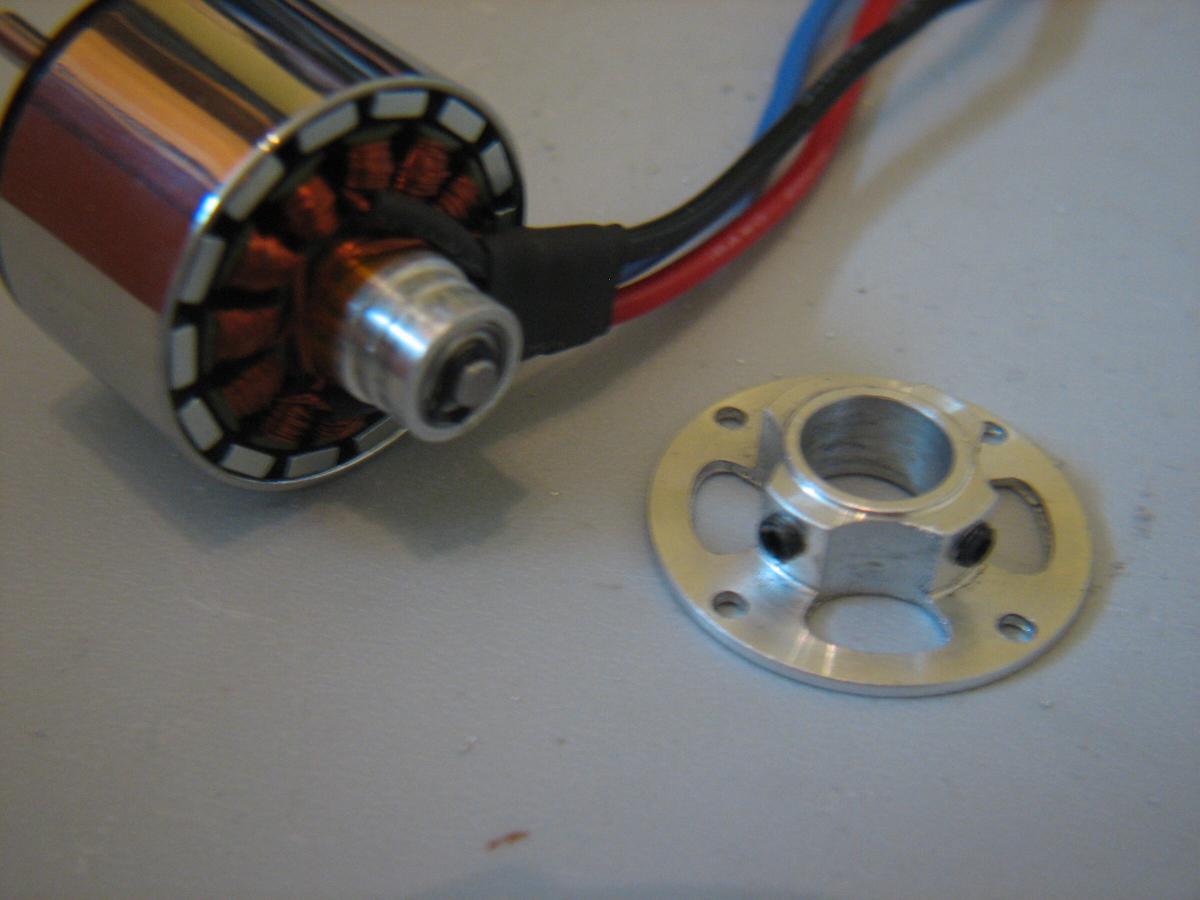
Die Arme hab ich aus Alu Rechteck (1cm x 2cm) U-Profilen mit 40cm länge gefertigt. Die Motoren werden auf kleine Aluplättchen geschraubt und unter die Aluprofile befestigt.
Das dritte Aluplättchen und das kurze Profilstück hab ich im folgenden ersetzt.

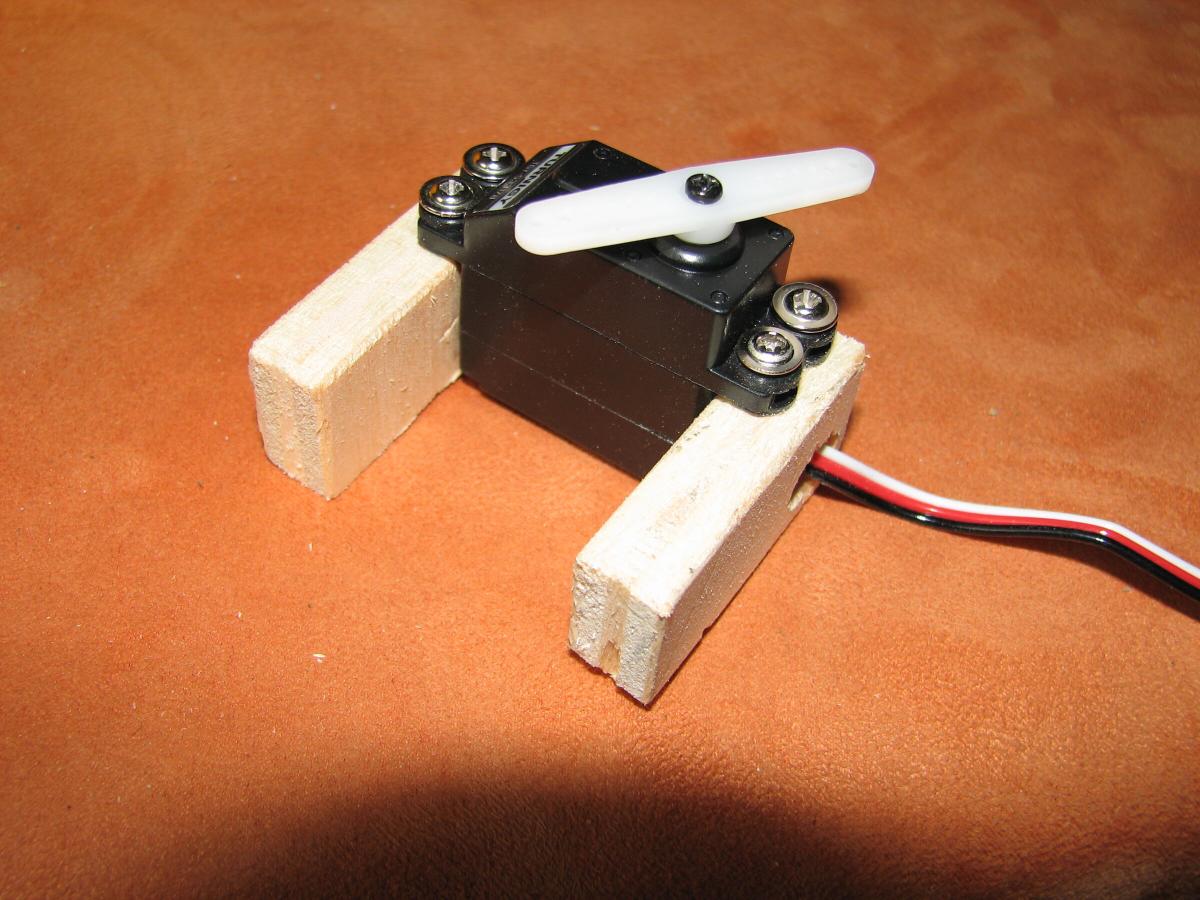
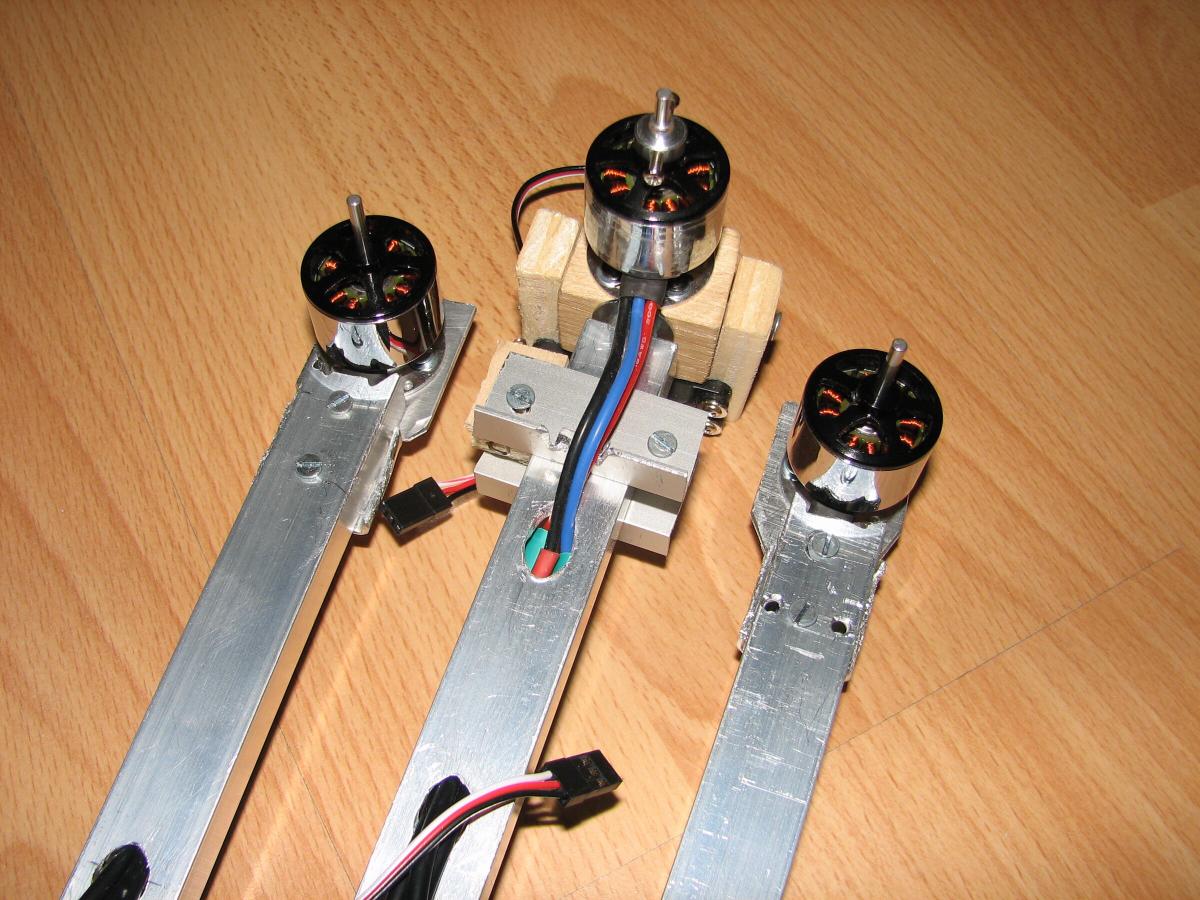
Zuerst der hintere Arm mit dem schwenkbaren Motor. Diesen hab ich auf einen Holzklotz mit einem 6mm Loch in der Mitte geschraubt.

Dieser Holzklotz wird dann auf eine M6 Gewindestange gesteck und wie zu sehen durch ein kurzes Stück Alurohr mit einem Quadratischen U-Profil gesteckt und festgeschraubt, sodass sich der Holzklotz noch gut drehen lässt.
Der feste Teil kommt dann in den kürzeren Arm und wird von zwei keinen Aluwinkeln eingequetscht und somit gehalten.



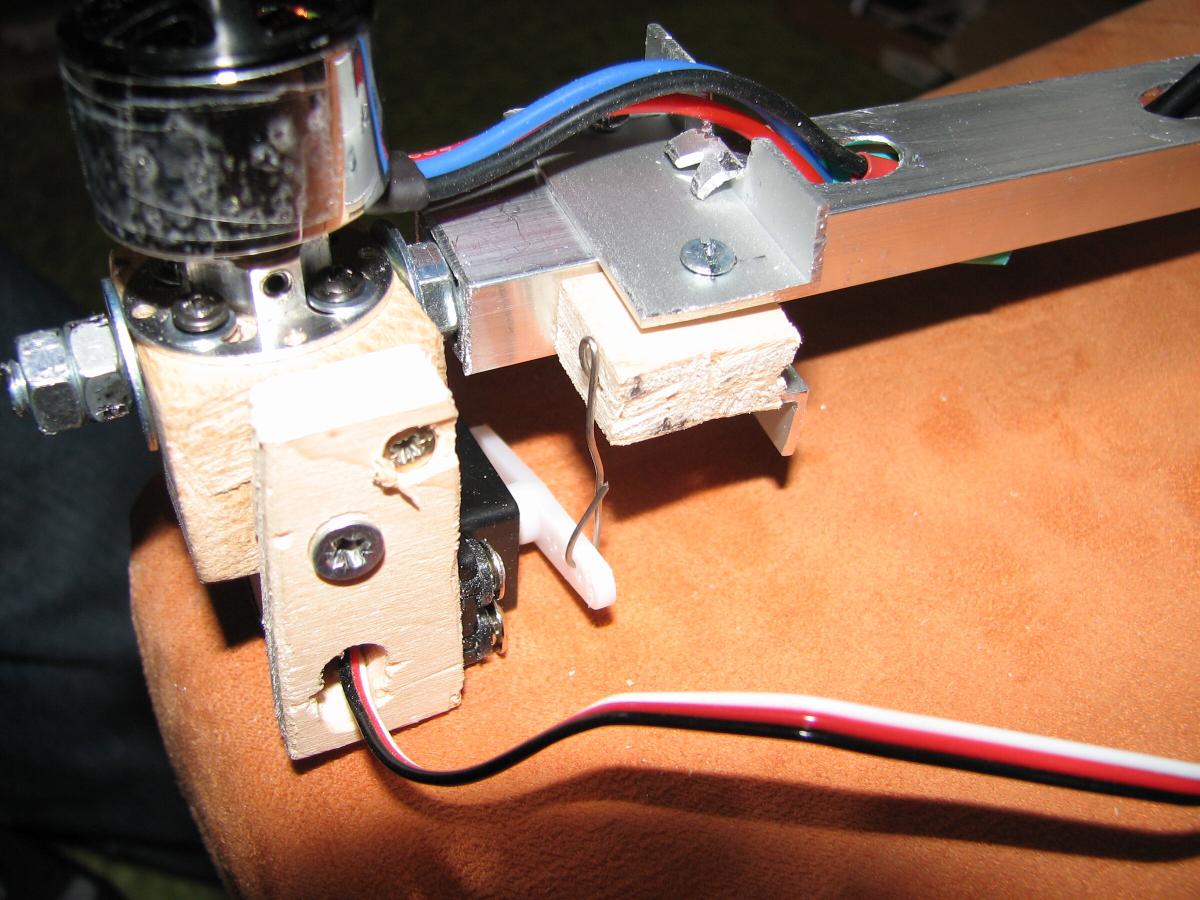
Unter den Holzklotz kommt der Servo, welcher das Gieren des Copters ermöglichen soll.
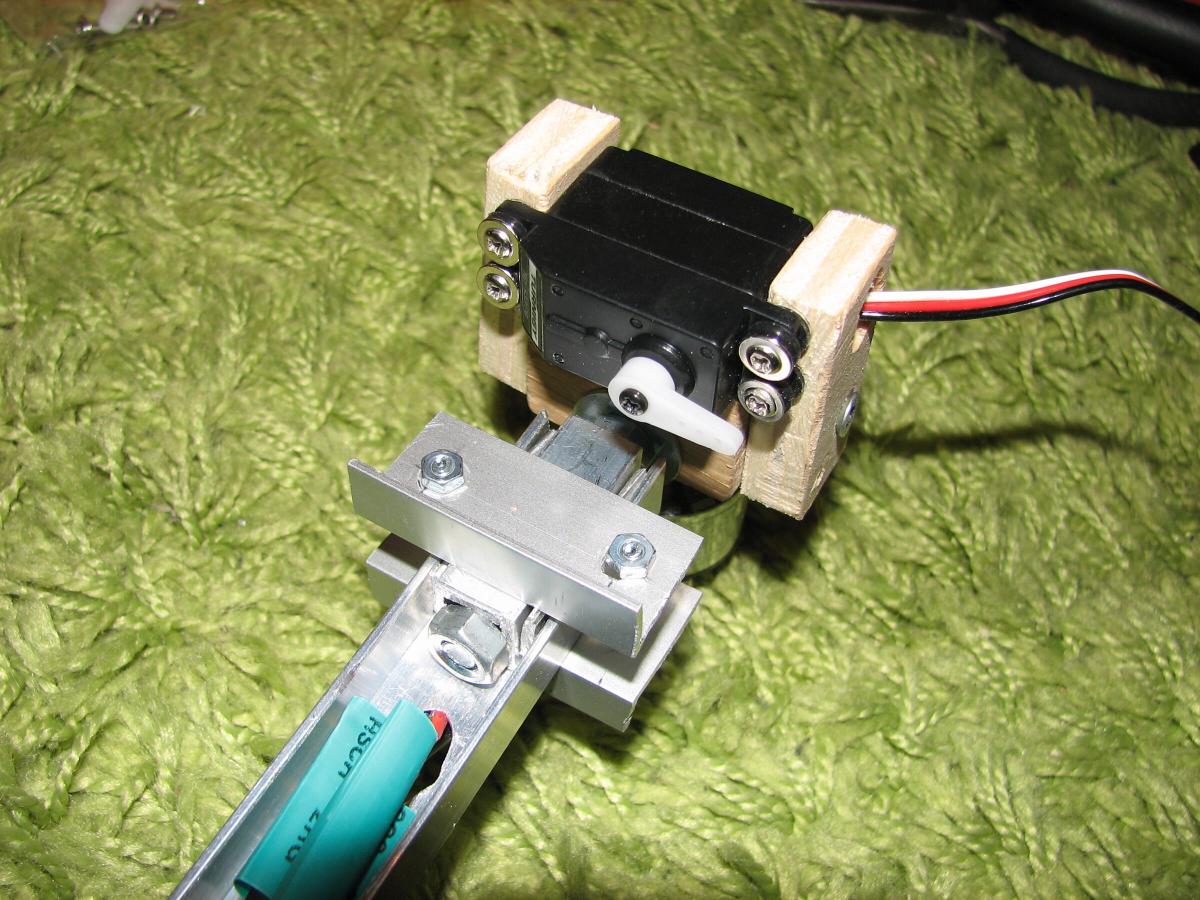
Ein Stück Draht verbindet dann den drehbaren Teil mit dem Arm.
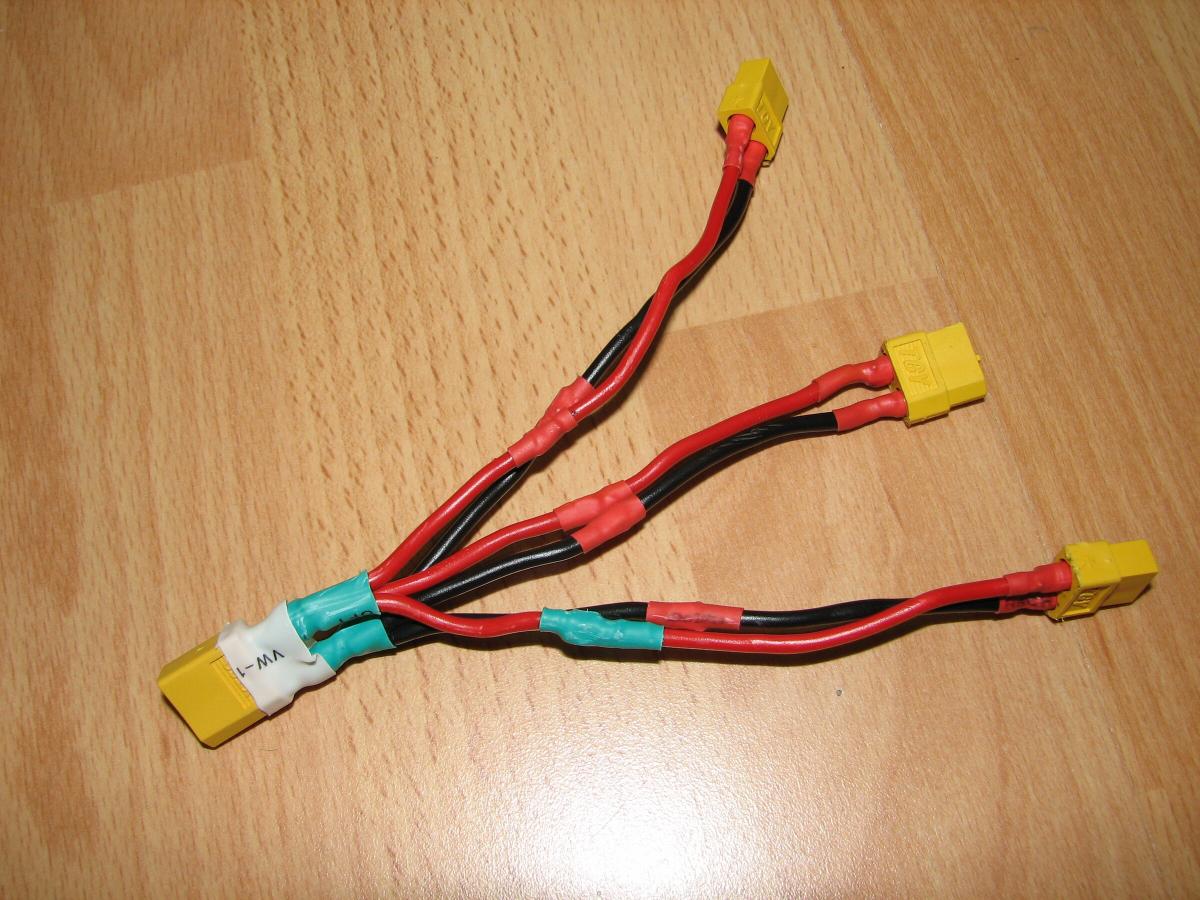
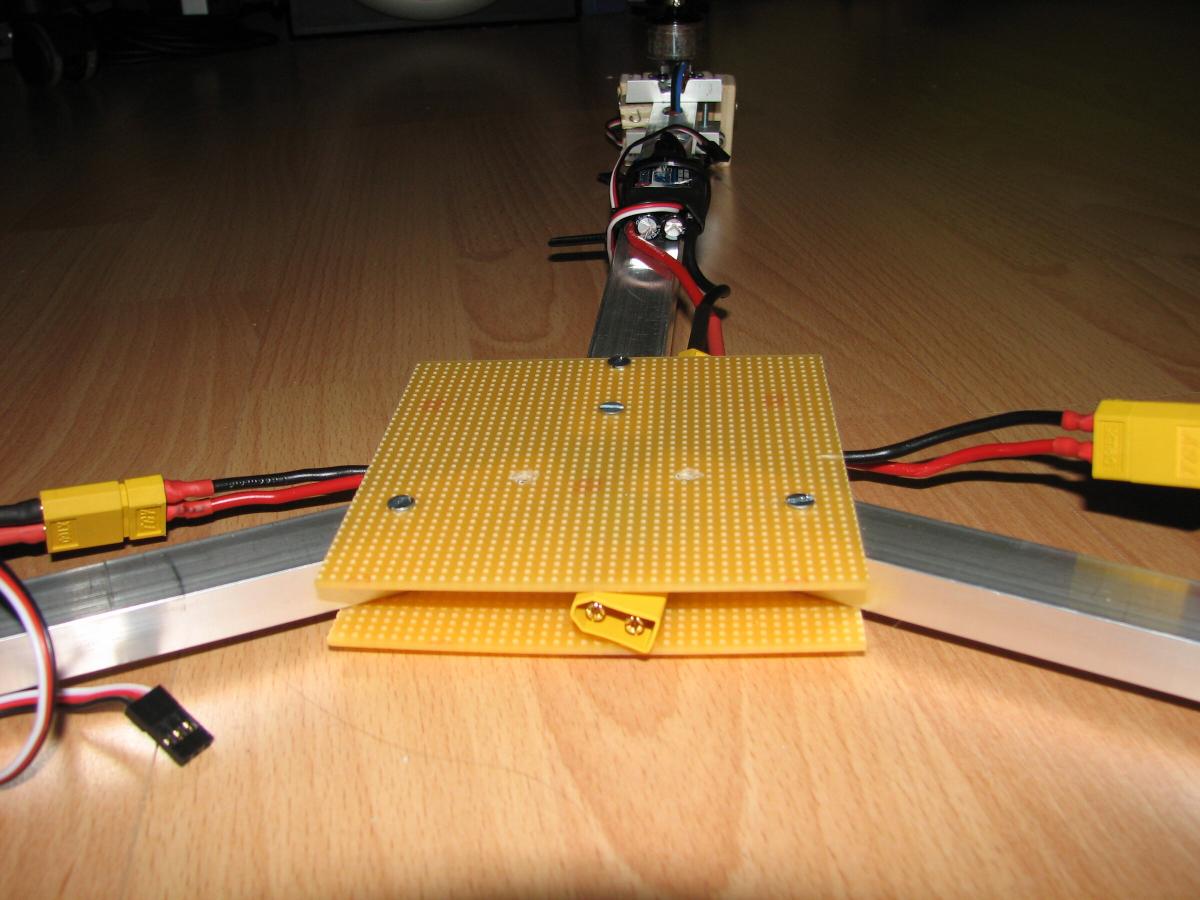
Da aber insgesamt drei ESC’s mit einem Lipo verbunden werden müssen hab ich aus einer Hand voll XT60 Verbindern einen dreifach Stecker gelötet.
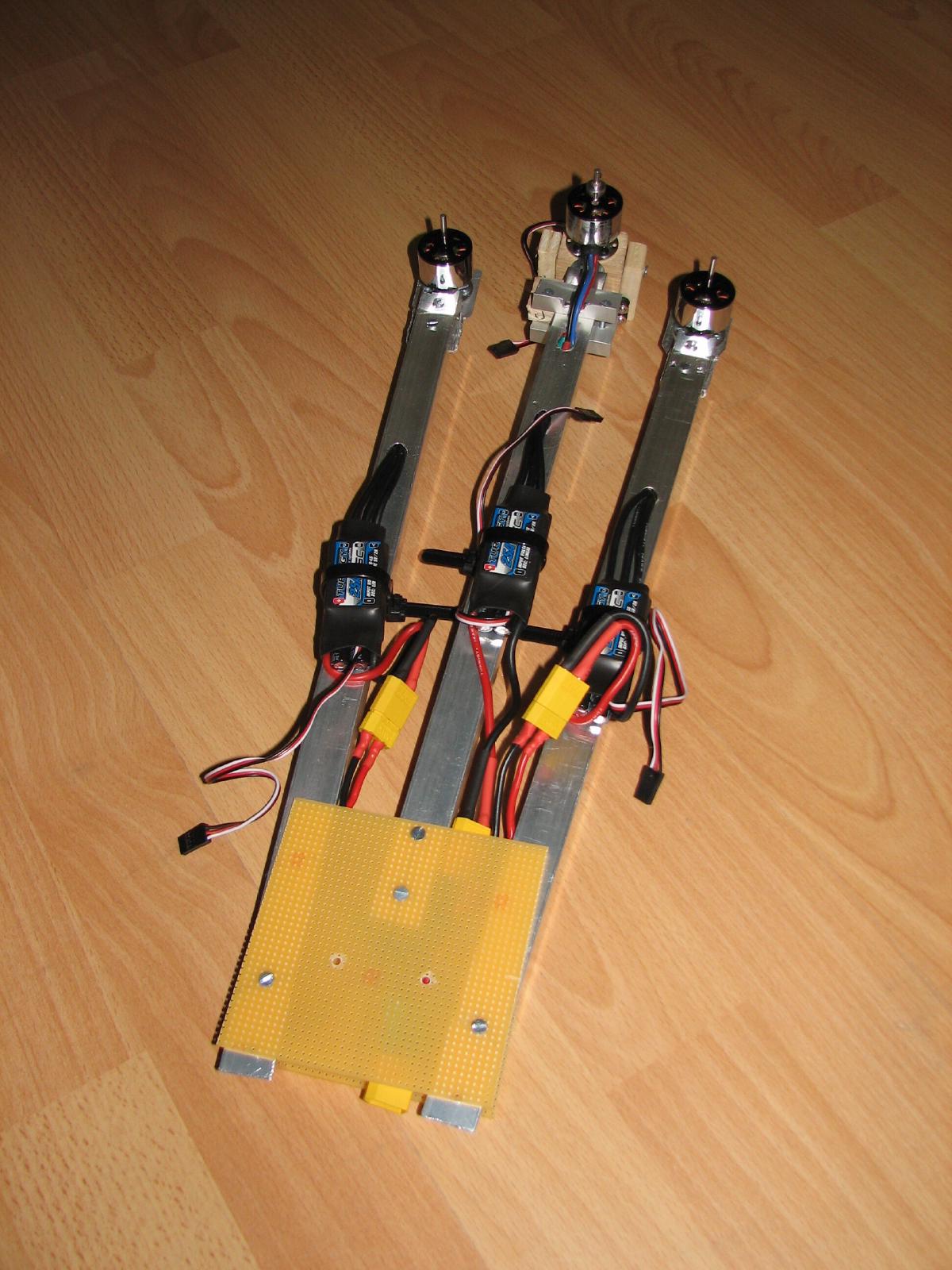
Hier zu sehen die restlichen zwei Arme mit fixierten Motoren.

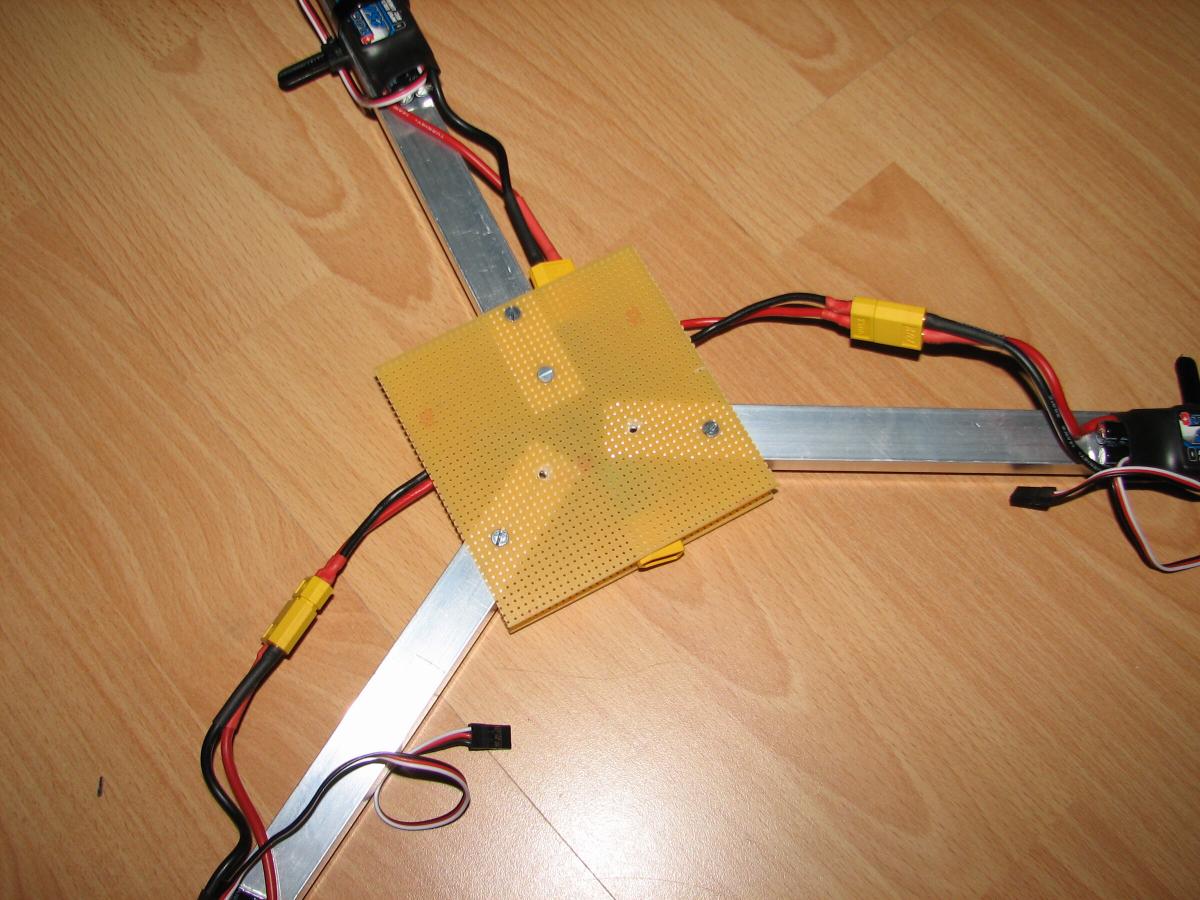
Als Centerplate für den Prototyp hab ich eine übrige 100mm x 100mm Lochrasterplatine ohne Lötaugen genommen.
Die Arme sind in einem Winkel von je 120° angebracht.
Die Stromverteilung befindet sich zwischen den beiden Hartpapierplatten.
Das sieht doch zumindest schon nach einem Tricopter aus. Entfernt man an den beiden vorderen Armen jeweils eine Schraube lassen diese sich sogar nach hinten einklappen.

Bei einem kurzen Test aller drei Motoren und ESC’s ist es dann passiert: das dritte ESC, welches ich bis dahin noch nicht einzelnd getest habe ist mit Knistern, Blitzen und etwas Qualm dann abgeraucht.
Dabei weiß ich allerdings nicht, ob ich etwas falsch gemacht habe oder ob es schon vorher defekt war. Nichts desto Trotz brauchte ich ein neues, was ich bei Ebay für das doppelte nachkaufen musste.
Weiter gehts mit dem Landegestell, bestehend aus Abwasserrohrstücken. Durch die auf 3/4 gekürzten Ringe sind die drei Landebeine zudem noch flexibel und bieten insgesamt wenig Angriffsfläche für den Wind.
Die “Landeringe” sollen vorallem den empfindlichen Lipo auf der Unterseite der Centerplate bei Landungen schützen.


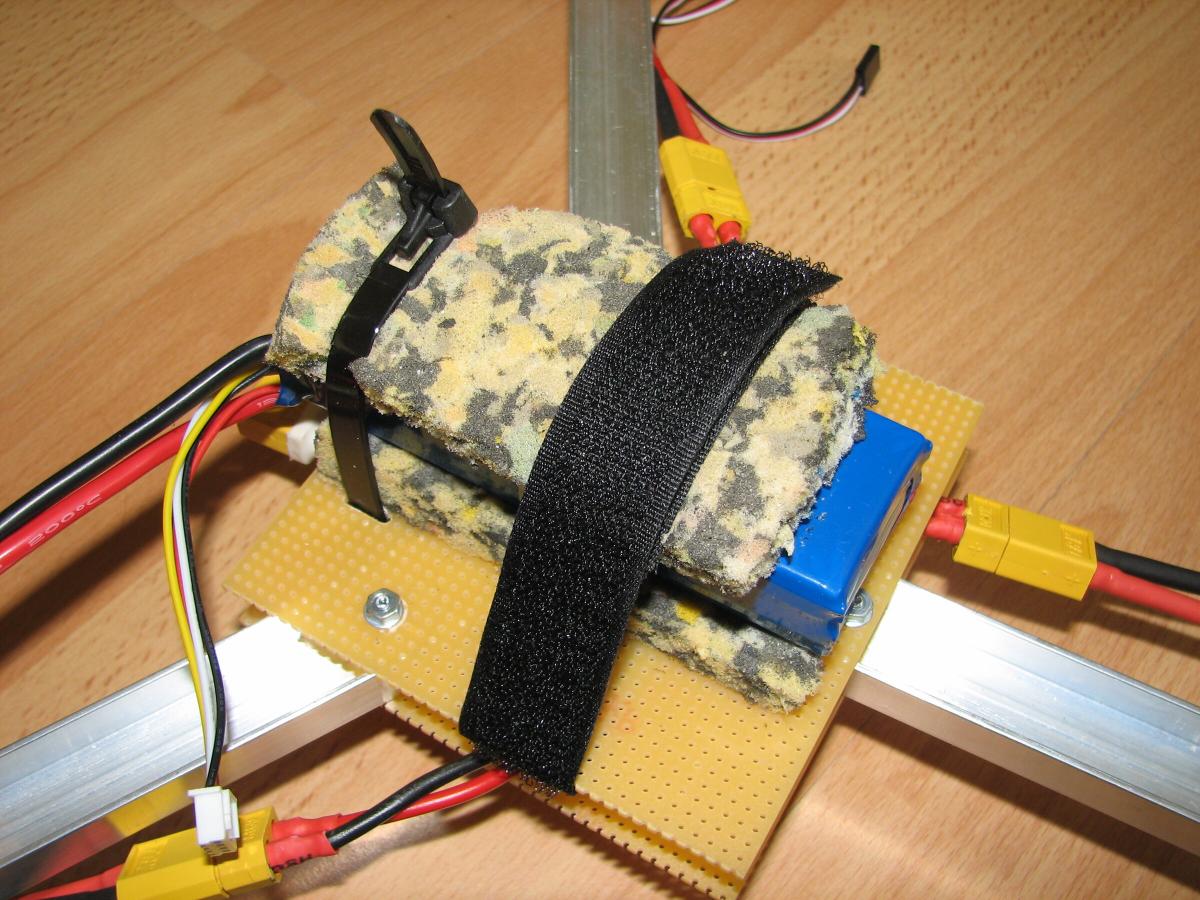
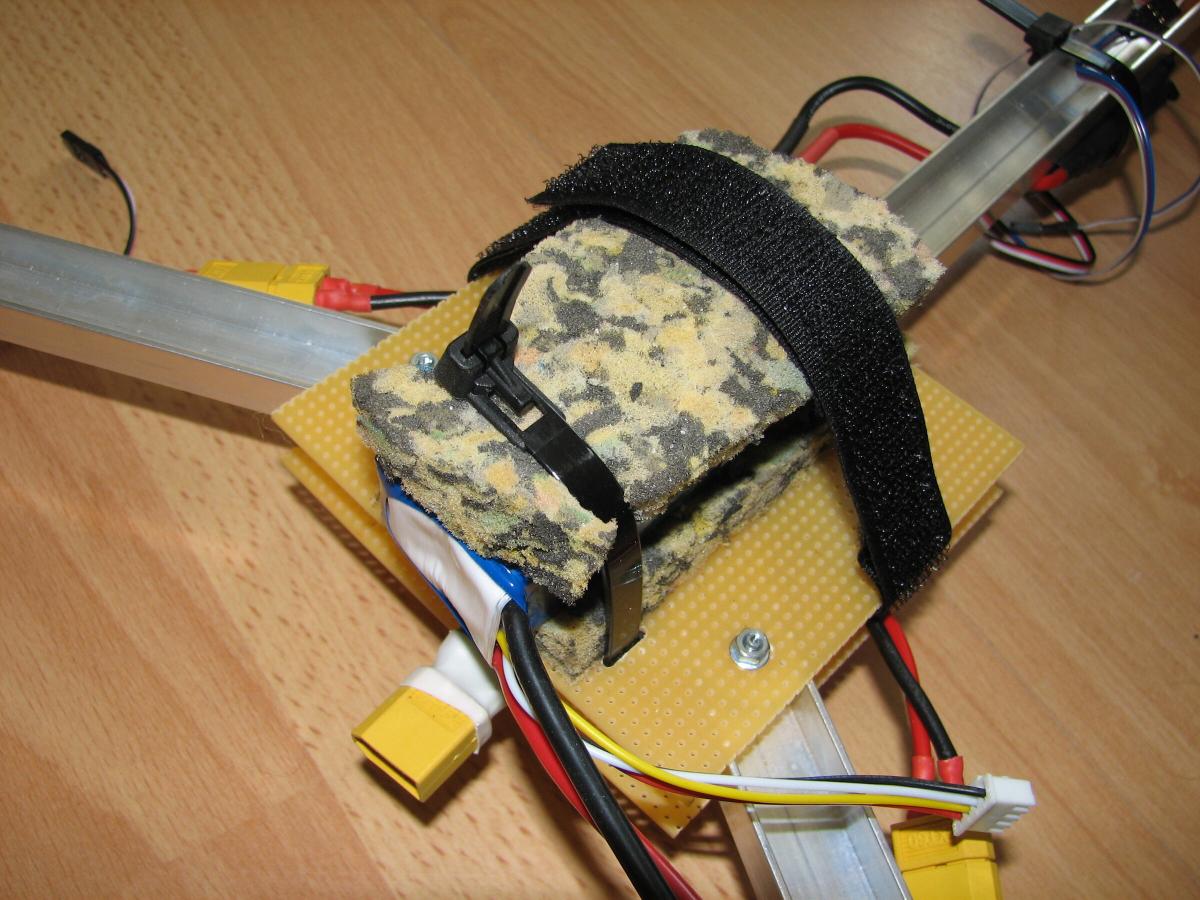
Unter die Centerplate kommt wie gesagt der Energielieferant in Form eines Lithium-Polymer Akkus. Da dieser sehr druckempfindlich ist hab ich ihn mit zwei Stoffpolstern eingedeckt und sanft mit wiederverschließbaren Kabelbindern und Klettband befestigt. (Ich weiß, es sieht wunderschön aus)
Nun wurde es zeit für das Controllerboard. Dazu zum Beispiel hierlang.
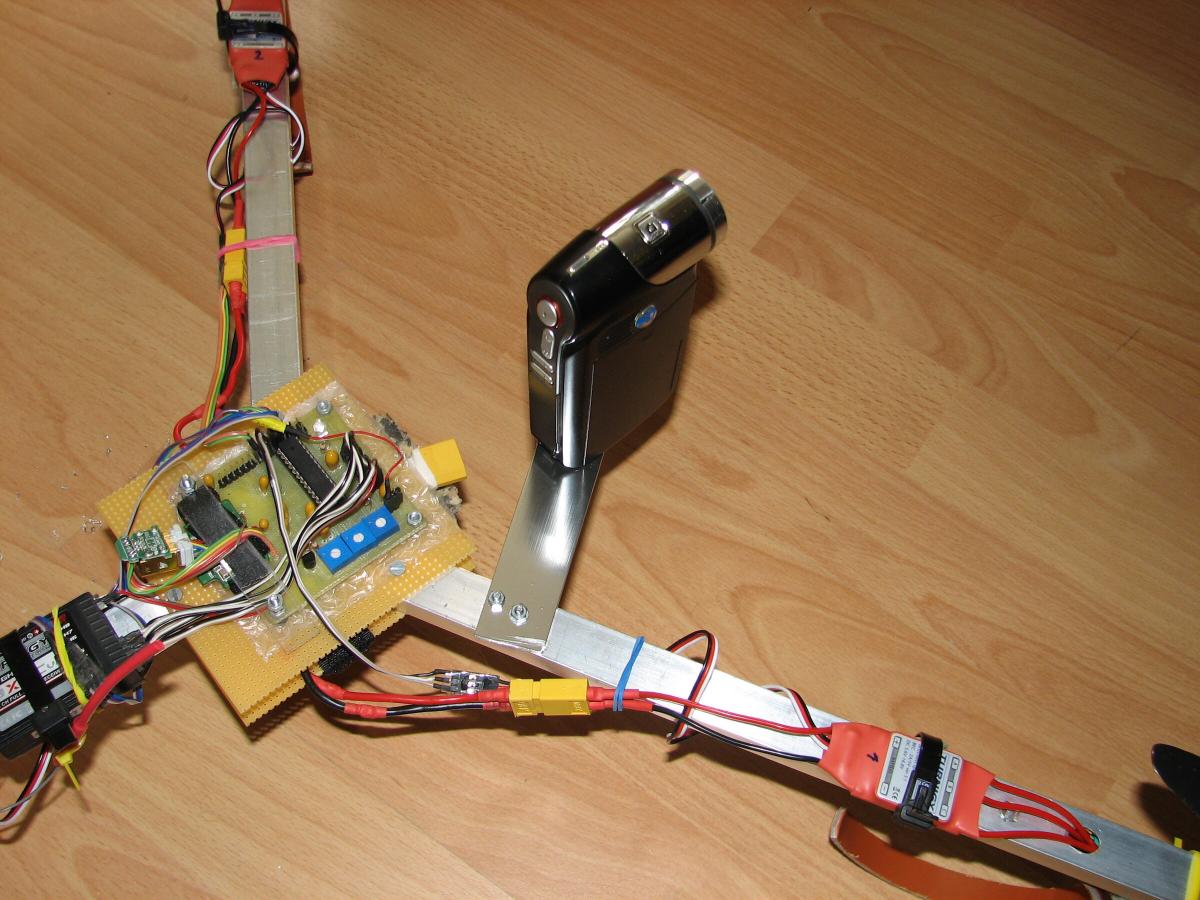
Als der Copter Prototyp dann schon einigermaßen fliegen konnte sollte er auch eine Onboardkamera tragen. Für den Prototyp reichte erstmal eine simple Lösung.