E-Bobby Car Controller (Teensy)
Mai 2021
Inhaltsverzeichnis
- E-Bobby Car
- Hoverboard Firmware Hack - How to
- Anhänger
- Controller
- Controller (Teensy)

In der Zwischenzeit kam zum DIY Gasdrücker wieder eine analoge Schultertaste vom X-Box Controller als Bremse dazu. Die Bedienung des Gashebels mit dem Zeigefinger und den Mittelfinger an der Bremse hat sich für mich als brauchbar erwiesen. Damit bleibt die linke Hand frei zum Dinge tragen, oder um sich damit kurzzeitig und oft spontan besser festzuhalten.


Wie erwähnt ist der Teensy sehr einfach und super schnell per USB programmierbar. Für den schnelleren Zugriff ist eine Mini USB Buchse im Tankdeckel verbaut. Der “Engine Start” Button ist mittlerweile auch mit Heißklebe gesichert. Die Vibrationen beim Fahren lösen fast jede Mutter.


Und hier das neue Herz des Bobbycars, ein Teensy 3.2. Zuerste spielte ich mit dem Gedanken, eine Platine zu ätzen, an der alle Verbindungen ordentlich ausgelegt sind. Jedoch wird sich insbesondere hier in Zukunft sehr viel ändern und eigentlich sind es zu 90 Prozent nur direkte Verbindungen von Steckern an den Microcontroller.
Den Schaltplan vom ersten Bobby Car Controller habe ich größtenteils übernommen. Aus Platz, Nutzen und Sicherheitsaspekten habe ich auf den Relais-Hoverboardeinschaltteil verzichtet. Die Startsequenz beinhaltet neben XT90-Antispark einstecken nun das Einschalten des Teensy per “Engine Start” Button und Drücken beider Hoverboard Powertaster.
Die Platine liegt dann, kurzschlussgeschützt durch eine Plastiktüte, zwischen dem Kabelwirrwarr im Innenraum.

Nach einer etwas intensiveren Testfahrt hatte sich das Loch für die Lenkstange oben etwas geweitet. Das habe ich zum Anlass genommen ein Gleitlager aus POM zu drehen, welches in die weiter aufgebohrte Öffnung passt. Ein kurzes Stück Gummischlauch am unteren Ende der Stange verringerte das Lenkspiel zusätzlich. Mit ordentlich Schmierfett an den reibenden Stellen der Lenkung war die Reparatur abgeschlossen. Zuvor war das Kabel vom Lenkrad mit Kabelbindern festgehalten worden, jetzt sind dort 3D gedruckte Kabelclips zu finden.


Einen freien Hardware Serial Port konnte ich für das Live-debugging noch nach hinten herausführen. Darüber gebe ich variabel mit bis zu 50 Hz alle interessanten Werte im CSV Format aus. Ein kleines zusammengefrickeltes Stück Software in Processing visualisiert den ganzen Kladderadatsch am Laptop.
Gerne hätte ich diese Übertragung kabellos umgesetzt, die HC-12 866 MHz Funkmodule waren Reichweitentechnisch zu limitierend mit 2m maximaler Entfernung. Was zugegebenermaßen auch an der schlechten Positionierung am hinteren Ende des Bobbycars gelegen haben könnte.

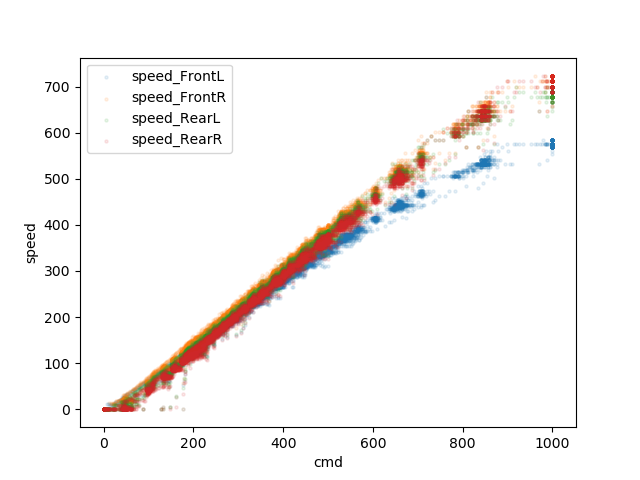
Was ich hier einmal aufgezeichnet habe ist der Stellwert “cmd”, der an die Motorcontroller gesendet wird (auf der X-Achse) im Verhältnis zur erreichten leerlauf Drehzahl der vier Motoren. Hierbei bestätigte sich meine Vermutung, dass der vordere linke Motor eine geringere Drehzahl erreicht. Was sich für den Leerlauf in dieser Grafik darstellt war beim Fahren durch Rekuperation des entsprechenden Rades spürbar. Während drei Räder also Strom verbrauchen, um das Gefährt zu beschleunigen Bremste das vordere Linke und speiste Strom zurück. Ein Perpetuum Mobile habe ich damit leider nicht erzeugt. Viel mehr war ein leichter Zug der Lenkung nach Links hin zu spüren.
Tatsächlich hatte das schuldige Rad ein sichtbar anderes Reifenprofil als alle anderen. Ob das wirklich ein Indiz ist gilt es noch herauszufinden.
Nach dem Tausch ist der Motor im Leerlauf noch immer etwas langsamer als die Anderen, die Rekuperation beim Beschleunigen war aber behoben.
Wenn das Live Logging per Funk schon nicht geht kann es wenigstens Aufgezeichnet werden. Hierzu wird einfach ein Sparkfun OpenLog angesteckt. Dieser zeichnet die Daten in eine TXT Datei auf. Beim Start des Teensy gibt dieser zuerst den Header der CSV aus, bevor die Daten Zeilenweise gesendet werden. Damit kann die resultierende Datei direkt ausgelesen oder analysiert werden.


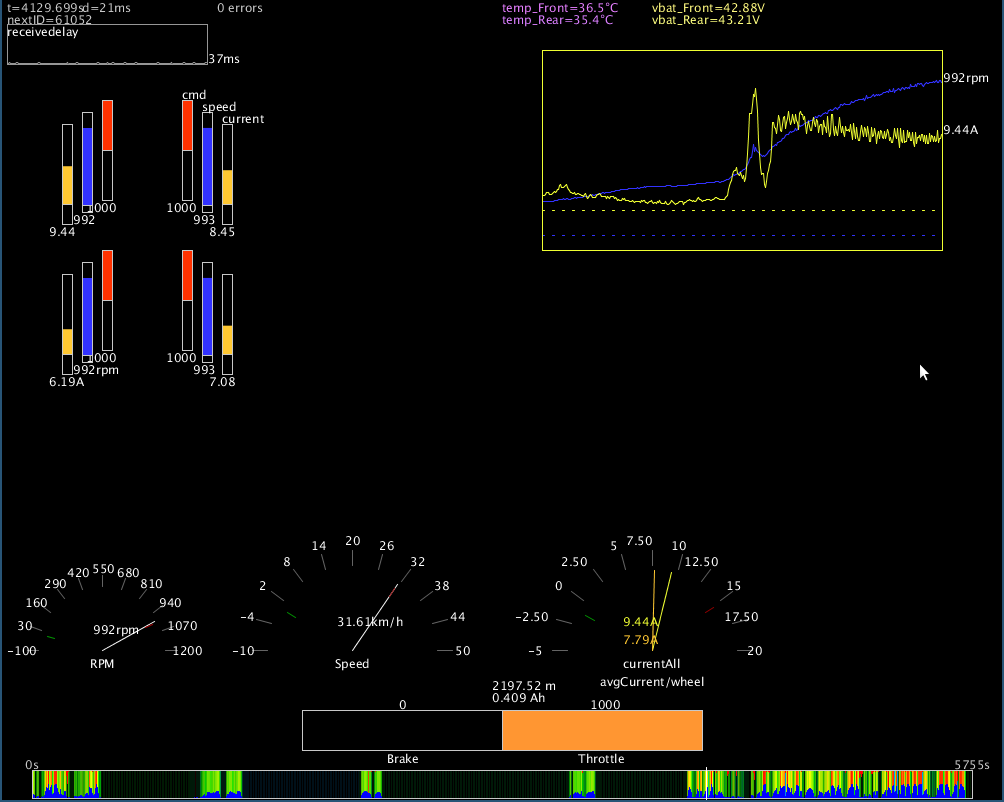
Hier auch mal ein Screenshot, wie die Visualisierung einer Logdatei aussieht. Der bunte Zeitstrahl am unteren Bildrand dient der besseren Übersicht. Gas, Bremse und Strom sind hier Farbkodiert dargestellt.
Mittlerweile bin ich auf Hoverboardcontroller Seite wieder von Torque Mode auf Sinusoidal zurückgegangen. Der Grund hierfür war mir die nicht “direkt” anfühlende Fahrweise. Für den Torque Mode ist eine Stromregelung im STM auf der Hoverboardplatine implementiert. Damit fühlt es sich von der Beschleunigung natürlicher an, da mit dem Finger die Leistung der Motoren bestimmt wird.
Eine der ganz frühen Versionen des Hoverboard-Firmware-Hack implementierte eine Steuerungsmethode (Commutation oder Sinusoidal), bei der beim Loslassen des Gashebels die Motoren im Freilauf ausrollen. Soweit ich das Verstehe war es dort eher ein Bug als ein Feature. In allen aktuellen Versionen verhalten sich diese einfacheren und “direkteren” Methoden so, dass bei einem geringeren Stellwert die Motoren abbremsen. Würde ich den Gaswert 1 zu 1 an die Motorcontroller schicken hätte ich nach wenigen Fahrten mit versehentlichen Loslassen des Gashebels schnell eine nach vorne verbogene Lenkstange.
Schön wäre ein Kompromiss zwischen direkter Sinusoidal Steuerung und Stromregelung. Umgesetzt habe ich dies im Teensy. Die Hoverboard Platinen dienen weiterhin nur als ESC.
Die Idee war im Fall der Beschleunigung (Neuer Potiwert > alter Potiwert) die Werte ohne Weiteres zu übernehmen. Sobald der Gashebel einen geringeren Wert liefert, als die Motoren aktuell angesteuert werden, soll der Stellwert (cmd) nur langsam verringert werden, um ein Ausrollen zu “simulieren”. Mein “simuliertes Ausrollen durch konstante Verringerung des Stellwertes” schob mich jedoch zielsicher gegen die Wand. Mit den Füßen zu bremsen wird demnach komplett ignoriert. Aufschluss über diese externen Bremskräfte gibt der Motorstrom. Sobald dieser ansteigt sollte der Stellwert zu den Motoren schneller verringert werden. Beide gerade beschriebene Ansätze habe ich zunächst implementiert. Hauptsächlich um sicher zu stellen, dass, wenn aus irgendeinem defekt die Motorströme nicht korrekt gemessen oder übermittelt werden, ein Langsamerwerden dennoch möglich ist. Da jetzt auch ein Bremshebel am Lenkrad angebracht ist sind beide Arten des Bremsens dazu in Proportion gesetzt.
Nun konnte ich endlich wieder gemütlich, aber auch ungemütlich fahren. Ausrollen ging super, nur die Bremsweise war eher stark einzustufen. Verringern der Bremsparameter führte jedoch gleichzeitig zu einem längeren Bremsweg bei einer Notbremsung. Als Ursache vermutete ich die Verzögerung von dem Moment der Betätigung der Bremse bis zum Zeitpunkt, an dem die Motoren spürbar bremsen. Die Lösung könnte es hier sein, der Stromregelung auch die Erhöhung der Stellwerte zu erlauben. Damit wäre ich jedoch wieder bei einer vollständigen Stromregelung wie es grob der Torque Mode umsetzt.
Geholfen hat mir das Prinzip des “Ducking”, wie es u.a. in der Musikproduktion bekannt ist. Für mein Bobbycar heiß es, dass noch einmal zusätzlich der Stellwert verringert wird, je stärker auf die Bremse gedrückt wird. Hier jedoch nur temporär, sodass ein Teil des Stellwertes nach Loslassen wieder hergestellt wird. Das initiale Bremsen wird damit keinesfalls geschwächt, jedoch Bremsen die Motoren nach Loslassen der Bremse nicht mehr so weit ab wie zuvor.
Noch eine Exponentialkurve auf die Bremswerte und es fährt sich besser als je zuvor.

10 Ah Akku
Seitdem das Bobbycar nun wieder funktioniert bin ich es ein paar Mal draußen gefahren. Die Einstellungen bezüglich maximaler Strom und somit Leistung sollten nicht zu verschieden von dem sein, was ich vor ein paar Jahren eingestellt hatte. Dennoch fingen die Controller beim Beschleunigen früh an zu piepsen wegen niedriger Akkuspannung, obwohl der Akku gerade erst aufgeladen wurde. Ein Blick in die Logs zeigte eine Spannung von 49V (4,1V/Zelle * 12 Zellen) zu Anfang, welche jedoch beim Fahren auf unter 42V einbricht. Es war so zwar möglich eine ganze Weil zu fahren, da ich allerdings eh nur alte 18650 Hoverboardakku Zellen verbaut hatte war es an der Zeit für ein neues Akkupack.
Eigentlich wollte ich den günstigen Weg gehen und einen defekten E-Bike Akku ausschlachen, jedoch hatte ich keinen zur Hand. Mit Blick auf einen Spaßigen Sommer hab ich in den sauren Apfel gebissen und einen Haufen refurbished LG ICR18650-HE4 2500mAh cells bei nkon.nl gekauft. Damit der Akku ohne weiteren Umbau ausgetauscht werden kann sollten es erneut zwei 6S4P Packs werden mit insgesamt 48 einzelzellen, welche zusammen fast 200 € gekostet haben. Das ist mehr als mich das ganze Bobbycar bisher gekostet hat, Autsch!


Platzierung und Anschluss ist gleich wie beim letzten Akkupack. Dieses mal hab ich die Zellen mit unterschiedlichen Spannungspotentialen besser voneinander isoliert. Ein weiterer guter Tipp ist es die fertigen Punktschweissungen abzudecken, bevor ein neuer Nickelstreifen aufgelegt wird. Ein Kurzschluss kann hier schnell in einem Brand enden.


Schaumstoff schützt die Lötverbindungen und mit Glasfasterklebeband aussendrum sind die Akkus auch schon fertig. Dieser Akku hat nun etwa die doppelte Kapazität im Vergleich zu vorher und kann zumindest in der Theorie 80 Ampere (4P * 20A) liefern. Das Bobbycar ist sofwareseitig auf 2*15A=30A limitiert.
Ein kurzer Fahrtest zeigte, dass die Spannung selbst bei Vollgas bei 47V bleibt. Die Maximalgeschwindigkeit lag somit bei 38 km/h statt zuvor 32 km/h. Nicht, dass mehr Speed mein Ziel gewesen wäre.


Controller PCB
Auf der MCH2022 ging der 5V Stepdown fü die Teensy Versorgungsspannung kaputt. Später habe ich diesen durch einen DD8024TA ersetzt, der bis 80V Eingangspannung vertragen soll, da ich eine Spannungsspitze als Ursache vermutete.
Insgesamt störte mich aber mehr und mehr die Unordnung der vielen Kabel und mögliche Kabelbrüche an den Lötverbindungen zur Platine. Als ich den Teensy aus dem Bauch des Bobbycar herauszog brach auch direkt das erste Kabel ab. Mittlerweile hatte ich das Gefühl, dass der Aufbau mit dem Teensy 3.2 und der verwendeten Peripherie gut funktioniert und etwas permanenter und sicherer aufgebaut werden kann.
Einen Verkabelungsplan hatte ich bereits erstellt. Diesen musste ich nur etwas aktualisieren und manche Bauteile von dem PCB exkulideren. Statt des internen ADC des Teensy werde ich einen ADS1115 I2C 4-Kanal A/D Wandler nutzen, um Gas und Bremsposition am Lenkrad auszulesen. Da ich zukünftig am Lenkrad ein paar mehr Inputs benötige (nicht zuletzt wegen der geplanten redundanten Sensoren) wird der A/D Wandler im Lenkrad unter der Hupe verbaut. Das vieradrige Kabel dorthin führt von nun an I2C Signale.

Mit dem Schaltplan war es leicht ein PCB zusammen zu Puzzeln. Der größte Unterschied zur Lochrasterplatine ist aber die Verwendung von JST-XH Steckern. Die Buchsen werden mit dem Kabeln vercrimpt, wodruch sie um ein weites robuster gegen Brüche sind.
Auch störte mich schon lange, dass die Platine nur lose herumbaumelte und nicht befestigt war. Zusammen mit Stepdown und Latchschaltung werden die Platinen senkrecht in das Bobbycar geschoben und mit zwei Schrauben am Boden fixiert.



Neben den zwei I2C Anschlüssen sind auf der Platine zwei SPI Stecker zu finden. Für einen davon ist eine SD Karte geplant. Aus Platzgründen musste das SD Karten Modul zertrennt werden. Näheres dazu gleich. Die getrennten Verbindungen wurden mit Lackdraht und Litze wiederhergestellt. Der Modulteil mit den auf 3.3V modifizierten Levelshiftern wird direkt auf das PCB gesteckt.


Warum musste das Modul zersängt werden? Im Tankdeckel befanden sich bisher der USB Anschluss zum Programmieren des Teensy und ein Druckschalter zum Umschalten der Modi. Den Schalter habe ich herausgenommen, da ich ihn selten benutze und er schwer zu erreichen war. Stattdessen soll die Micro SD Karte im Tankdeckel versteckt werden. Diese muss ich normalerweise frühestens am Ende eines Tages oder zum Debuggen herausnehmen.
Dies erklärt jedoch noch nicht den Neubau des gesamten Tankdeckels, wie er in den nachfolgenden Fotos zu sehen ist. Beim Shoppen für ein paar andere Projekte stieß ich auf die Adafruit Neopixel Ringe. Der Ring mit 16 Pixeln würde super auf den Tankdeckel passen und könnte alles mögliche Anzeigen, wie beispielsweise die Akkuspannung oder Fehlercodes. Mit Freecad und einem Messchieber ging es ans Zeichnen. Wenige Iterationen später stand ein Design mit Tankstopfen und Platz für die LEDs. Der Stopfen wird durch eine Drehung um 90 Grad arretiert und gibt dabei einen super satisfying click von sich.




Das Coden lief extrem Reibungsfrei und der Ring leuchtet.

Etwas fummelig war das durchführen der vielen Kabel durch das vorhandene Loch, in dem der Schalter vorher eingeschraubt war.
Die SD Karte wird in einem Winkel von oben durch das kleine Loch im Tankdeckel eingesteckt. Ohne das Modul zu kürzen hätte das keinesfalls gepasst und ist so schon super knapp bemessen.




Beim Fahren ist der Tankdeckel leider durch den eigenen Körper etwas verdeckt und nicht gut zu erkennen. Trotzdem eine sinnvolle Ergänzung, wie ich finde.


Wie bereits geschrieben ist durch den A/D Wandler im Lenkrad dort jetzt I2C vorhanden.
Was gibt es noch mit I2C? Genau, OLED Displays. Und ein solches mit 0.91" und 128x32 Pixeln passt hervoragend an den Rand des Lenkrades. Einen zusätzlichen Anbau bringt die Optik meiner Meinung nach zu weit vom Bobbycar weg, weshalb es bündig eingelassen sein sollte.
Mit dem Wissen über den Radius des Lenkrades und die Form des Hohlraums konnte ich einen Einsatz zeichnen, der das Display hinter einer Acrylglasscheibe hällt. Die Kabel werden durch den Druck links herausgeführt.
Mit einer Trennscheibe am Dremel wurde ein passendes Fenster vorsichtig ausgeschnitten und passend gefeilt.



Das Display wird in seiner Umhausung von oben eingesetzt. Das kleine Teil rechts wird von unten angeschraubt und verhindert ein Herausfallen.


Neben dem LED Ring für einfache Statusmeldungen kann ich im Display konkrete Zahlenwerte anzeigen:
Geschwindigkeit, Momentanverbrauch, Mittlerer Verbrauch, Akkuspannung, Gefahrene Kilometer, Verbrauchte Energie, etc.


Eine der Hoverboardplatinen hat etwas Probleme mit der Temperaturmessung und springt mehrere Grad hoch und runter. Die Messung der Temperatur wird am STM32 gemessen und nicht auf den Mosfets oder der Aluminium Kühlplatte. Zudem ist das Kalibrieren davon sehr umständlich und nicht besonders genau.
Auf dem Schaltplan waren bereits die drei DS18B20 1Wire Temperatursensoren zu erkennen, die an einen der unbenutzten Stecker angeschlossen werden. Zwei davon sind mit Kontakt zu den Aluplatten der Mainboards in das Holzstück eingelassen, der dritte wird frei im Bauch des Bobbycar hängen.
Ein paar Monate zuvor hatte ich bereits zwei 40mm Lüfter links und rechts neben die Hoverboardplatinen eingebaut, um etwas Luftzirkulation im Inneren zu forcieren. Zu dem Zeitpunkt habe ich den Warntönen noch geglaubt und bin von zu hohen Temperaturen ausgegangen. Diese Lüfter werden über Transistoren nun eingeschaltet, wenn die Temperatur steigt. Die Lüfter sind tatsächlich nicht notwendig. Bei meiner letzten längeren Fahrt bei sommerlichen Temperaturen wurden nur einmal kurzzeitig 45°C erreicht. Genau das war die Schwelle, ab der die Lüfter angegangen wären.
Die akustische Schwebung der beiden Lüfter hört sich an, wie ein Netzwerkswitch. Auch eigentlich ganz nice.



Irgendwann zwischendurch wurden an die beiden aneinander reibenden Flächen der Spurstange zum Rumpf Gleitpads angeklebt. Zuvor habe ich den Bereich mit Schmiermittel eingerieben. Allerdings lagert sich dort schnell Sand und Dreck ab, welcher dann die Kunststoffe auf Dauer abschleift.


Gas- und Bremshebel
Auf so einem Bobbycar zu sitzen erfordert ein erhöhtes Vertrauen in Mechanik, Elektrik und Software. Insbesondere, wenn man selbst für alles drei Verantwortlich war. Der Gedanke, was passiert wenn Bauteil X Fehlerfall Y hat, kommt mir recht häfig. Meist führt es glücklicherweise einfach zum Stillstand mit oder ohne anschließenden Hardwaredefekt. Anderes wiederum kann durch etwas Vorausplanung in der Software abgefangen werden und einen Failsafe auslösen.
Sehen wir uns einmal den linearen Hallsensor am Gashebel an. Der Magnet wird durch Betätigung mit dem Finger vor und zurück, entlang des Hallsensors bewegt. Die Kalibrierung deckt die zu erwartenden Minimal- und Maximalwerte ab. Darüber und darunter ist eine Deadzone eingeplant, in der sich der berechnete Wert nicht weiter verändert. Sollte sich eines der drei Kabel zum Hallsensor (GND, VCC oder Signal) lösen, liegt der gemessene Wert weit außerhalb der Deadzone und ein Not-Halt (Stoppkategorie 2) wird per Software ausgelöst. Was aber, wenn der Hallsensor herausfällt oder ein falsches Signal ausgibt? Das Signal könnte irgendwo im erlaubten Bereich liegen. Ergebnis: das Bobbycar fährt ungewollt weiter.
Diesen Fehlerfall hatte ich nach meinem Gefühl nach bisher nicht ausreichend beachtet. Meine Lösung war die Gleiche, wie sie bereits beim Hoverbrett umgesetzt ist: Den gleichen Messwert durch zwei Sensoren ermitteln. Weichen die Messwerte zu weit voneinander ab, wird der Failsafe ausgelöst. Zusätzlich wird die Auflösung höher, da im Normalbetrieb der Mittelwert beider Sensoren für weitere Berechnungen genutzt werden kann.
Sehr viel Text, einfache Umsetzung.


Bei dieser Gelegenheit wurde die Befestigung an der Unterseite des Lenkrades verbessert. Die CAD Zeichnung von dem Lenkradbogen hatte ich bereits vom Display.


Auch fand ich die offene Kabelführung nicht besonders schön und sicher. Die Radien für die Abdeckung gut zu Treffen war etwas komplizierter. Nach wenigen Testdrucken war ich aber dann doch zufrieden. Das Sackloch im Versteifungsgerippe nutze ich, um mittels Madenschraube die Blende darin festzuklemmen.

Nachdem ich den Gashebel neu gebaut hatte wurde die X-Box Schultertaste zum Bremshebel umfunktioniert. Leider ist mittlerweile das eingetroffen, weshalb ich den Umbau auf Hallsensoren vorsorglich angegangen bin. Das Poti schleift und liefert kein sauberes Signal. Der erwähnte Failsafe wurde auch hier eingebaut und sorgt nun hin und wieder für ein ungewolltes Stehenbleiben. Nervig, aber trotzdem gut so.
Daher stand jetzt der Neubau eines Bremshebels an. Diesen habe ich mechanisch sehr ähnlich umgesetzt. Diesmal wird der 15mm lange Stabmagnet (3mm Druchmesser) in die Alustange eingelassen. Eine Schraube an der Seite sorgt für die Endanschläge, indem sie in einem Langloch des aüßeren PVC Rohrs sitzt.
Der Hallsensor wird wieder mittels Epoxydkleber von außen an das PVC Rohr geklebt. Bei der Bremse verzichte ich auf den zweiten Hallsensor. Sollte die Bremse auslösen entschleunigt das Bobbycar sowieso. Die Geschwindigkeit im Rückwärtsgang ist zudem sehr stark Begrenzt. An der Fingerseite sitzt eine Formschöne Endkappe. Axial wird sie durch eine M3 Schraube mit Gewinde in der Alustange in Position gehalten. Zwischen Endkappe und PVC Rohr sorgt eine eher weiche aber lange Druckfeder dafür, dass der Hebel von selbst herausgedrückt wird.
Angepasst an die Form des Lenkrads sitzt ein 3D Druck Teil, welches den neuen Bremshebel teilweise Umfasst. 2-Komponenten Epoxydkleber sorgt hier erneut für den festen Halt.





Bedient werden kann das Bobbycar bislang nur durch einen Ein/Aus Taster und die Gas- und Bremshebel.
Auch, wenn ich zum aktuellen Zeitpunkt eher keine Menüführung am Bobbycar haben möchte, wäre etwas mehr Interaktion in manchen Situationen doch hilfreich. Zum Beispiel das Umschalten in einem langsameren Modus oder Anzeigen weiterer Informationen auf den kleinen OLED Display.
Dazu habe ich zwei Taster gesucht, die besonders an der Anschlussseite nicht zu tief herausstehen. Zwischen den Versteifungen kamen nur zwei Positionen für die 12mm Löcher in Frage.
An dem 4-Kanal ADC im Lenkrad war noch ein Kanal frei. Solange ich diesen nicht für andere Funktionen benötige nutze ich diesen für zwei Taster. Mit verschiedenen Widerstandsgrößen sind für die vier Zustände (Kein Knopf gedrückt, Linker gedrückt, Rechter gedrückt, beide gedrückt) distinkte Spannungen möglich.
Nachfolgend auch einmal der Schaltplan von dem, was sich im Lenkrad befindet. Ein Schaltplan vom gesamten Bobbycar zum Zeitpunkt des 2.3.2024 als PDF: 20240302_Bobbycar_Wiring.pdf



Mitlerweile habe ich mich an diese unübliche Bedienung von Gas und Bremse mit der rechten Hand gewöhnt. Ein bisschen sieht es dann aus, als würde man die Richtung der Lorentzkraft ermitteln wollen.


Da der Gashebel mit zwei Aluminiumteilen aneinander reibt hat sich dort einiges an Ablagerung gebildet. Auch weil dieser nicht mehr ganz gerade sitzt und verkanten kann wurde jetzt das äußere Rohr durch eines aus PVC ersetzt.

Irgendwo im Inneren des Bobbycars hatte sich das Kabel zum Startbutton aufgerieben und zur Status LED kurzgeschlossen. Zuerst hatte ich den Taster selbst unter Verdacht, weshalb dieser direkt ersetzt wurde. Beim Ausbau zeigte sich jedoch, dass das Kabel selbst etwas besseren Schutz bedarf.

Bisher half mir ein Sitzkissen dabei die längeren Fahrten etwas erträglicher zu machen. Nur wenn ich es mal vergaß, hatte ich die nächsten Tage noch was davon.
Ganz passend fiel mir da etwas festerer Verpackungsschaumstoff in die Hände, teilweise noch mit Klebefläche. Aus mehreren kleinen Stücken konnte ich mir eine Sitzgrundlage zurecht schnitzen. Wo es nötig war wurde mir UHU Por geklebt.



Teensy 4.1
Für den Teensy 3.2 hatte ich mich damals entschieden, da ich bereits einen in einem anderen Projekt im Einsatz hatte und so die Ersatzteilversorgung für mich besser war.
Dann kam die Chip shortage und kurz danach wurde der Teensy 3 vom Hersteller eingestellt.
Bevor ich in die Bredouille komme einen defekten Teensy 3.2 im Bobbycar kurzfristig ersetzen zu müssen, wollte ich lieber auf Hardware umsteigen, die es noch zu kaufen gibt. Der Teensy 4.1 ist eh viel besser und schneller und kann viel mehr.
An sich ist die neue Platine aber weitestgehend gleich geblieben.





Erwähnenswert wäre, dass ich jetzt den Micro SD Slot auf dem Teensy nutze und den SD Halter im Tankdeckel ausgebaut habe. Im Code gibt es dafür ein Interface, mit dem per USB Serial der Inhalt der SD Karte übertragen und anschließend gelöscht werden kann. Somit gibt es erstmal keine Notwendigkeit mehr, die Speicherkarte herausnehmen zu müssen.
Allerdings wird die micro SD Karte nur durch Reibung festgehalten. Eine gedruckte Abdeckung wird draufgeklippst und verhindert hoffentlich ein Herausfallen.


Bobbycar Git: git.ctdo.de/interfisch/bobbycar