PTZ Movinghead
Dezember 2024

Das Gerät besteht aus einer Basis, an der eine Platine mit RJ45 Buchse für Stromversorgung, Steuerung und Video befestigt ist. Alle Signale werden über einen Schleifring mit 12 Kontakten an den sich drehen Teil übertragen. Daran sind zwei Schrittmotoren montiert. Die Schrittmotortreiber befinden sich zusammen mit anderer Signalverarbeitung auf einer weiteren Platine. Senkrecht zur ersten Rotationsachse ist der Arm für die Tilt-Achse angebracht. Diese trägt das Kameramodul mit Fokus, Zoom und Motoren für die Blende. Die Kamera muss sich nur um 90° drehen können. Ein Mikrotaster wird für die Referenzierung der Tilt-Achse verwendet. Da die Pan-Achse unendlich drehbar ist wurde ein Hall-Sensor verbaut und kein harter Endstop.

Die Idee bestehende Motortreiber weiter zu nutzen und die Ansteuerung herauszufinden habe ich verworfen, da auf den Platinen ebenfalls die Kamerasteuerung zu finden war, die ich nicht mehr benötige. So wäre ich weniger flexibel neue Funktionen hinzuzufügen.

Ein paar TMC2130 Treiber waren noch im Sortimentskasten sowie ein ESP8266. Kurze Zeit später drehte sich die erste Achse.

So richtig gut ließ es sich nicht testen, wenn Kabel sich um alles herum drehen. Der Anreiz war also da schnell eine Platine für ESP und Schrittmotortreiber zu zeichnen.
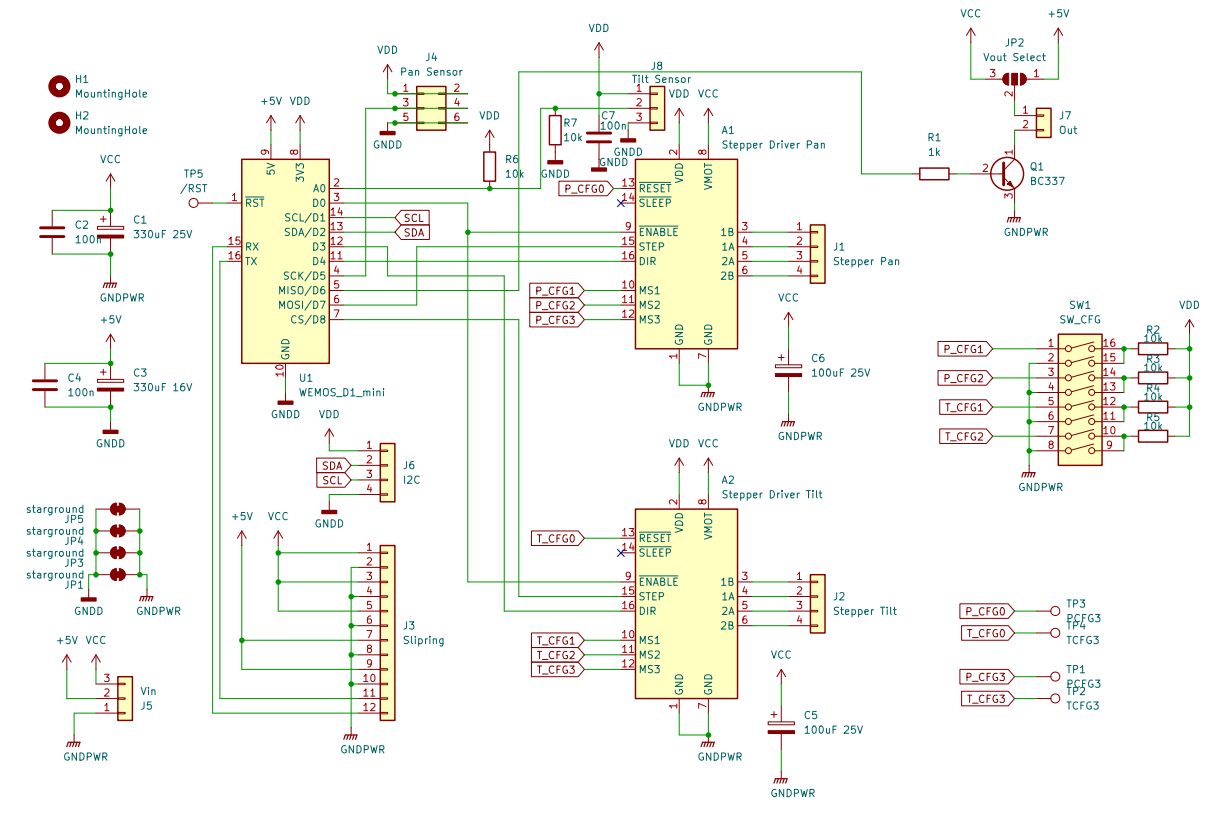
Ein paar Bauteile habe ich von der Originalplatine abgelötet und weiterverwendet. Neben den Buchsen/Steckern für Motoren und Schleifring war das der Dip Schalter (zur Konfiguration der TMC Treiber) und der Hallsensor auf einer kleinen Platine, die später knapp über dem an der Basis montierten Magneten vorbeifahren wird.


Der ESP kann mit dem WLan verbunden werden. Somit ist nur die Stromversorgung als physische Verbindung notwendig. Wenn keine Endlosrotation benötigt wird ist es ausreichend die drei Kabel durch die Mitte zu führen und den Schleifring ausgebaut zu lassen. Drei Kabel deshalb, da ich 5V Logikspannung und die ca 19V Motorspannung außerhalb erzeuge.
Über den Schleifring habe ich jedoch den UART des ESP herausgeführt. Nur auf Wireless vertrauen möchte ich dann auch nicht.

Die Referenzfahrt der Pan-Achse funktioniert wie gesagt per Hallsensor und Magnet. Da ich auf den Kamerakäfig verzichten kann ist es der Tilt-Achse nun möglich, sich ebenfalls endlos zu drehen. Neben dem größeren Ritzel ist dazu ein weiterer Hallsensor (Latching) angebracht. Auf dem Ritzel wird direkt eine Befestigung für den Aktor angeschraubt. Darin befindet sich am äußeren Rand ein kleiner Magnet und definiert den Nullpunkt der Tilt Referenzfahrt.


Die Stromversorgungsplatine kommt seitlich an die Basis. Hier verwende ich die gleichen Schrauben, mit denen die ursprüngliche Platine befestigt war. Darauf befindet sich der Anschluss für den Schleifringstecker und ein Step Down Converter, den ich 1 zu 1 von dem Off-The-Shelf Modul unten link im Bild kopiert habe. UART ist auf die Stiftleiste durchverbunden.

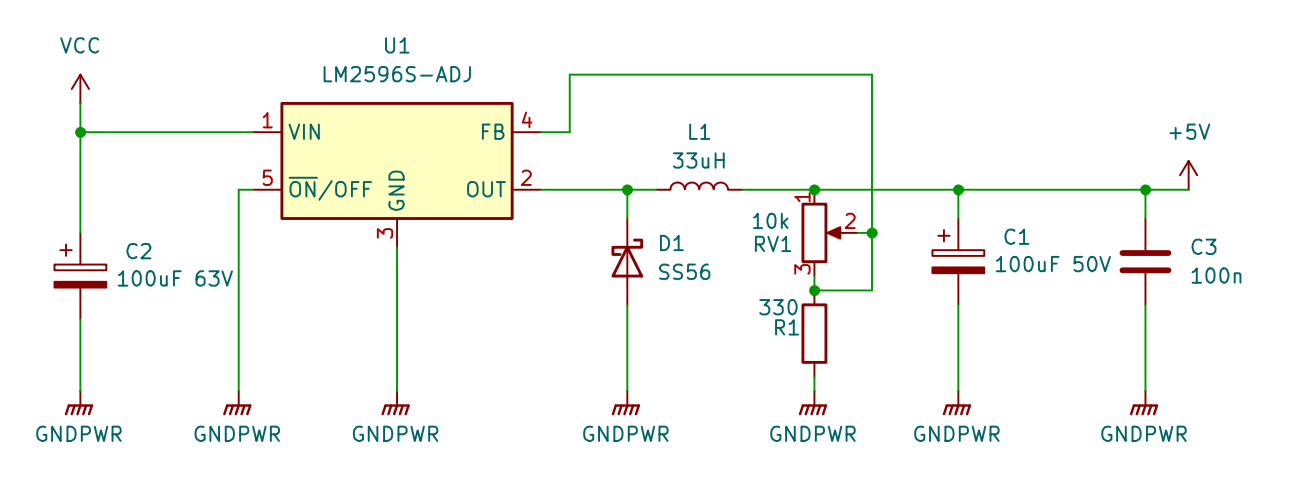
20260110_schematic_powerboard.pdf
Mit etwas Code funktioniert der Movinghead so schonmal schon.
Zum austesten der Bewegungen habe ich zuerst die Referenzfahrt implementiert.
Danach wird auf Artnet Pakete gewartet im Format: pan_coarse, pan_fine, tilt_coarse,tilt_fine, dimmer.
Ich meine den Bewegungsbereich auf je 720° für 16 Bit eingeteilt zu haben, was aber auch nur Einstellungssache ist.
Die Motoren drehen zu sehen ist schonmal nett anzusehen, einen Lichtstrahl durch den Raum zu bewegen wäre aber noch etwas spannender.
Gerne hätte ich eine LED Taschenlampe verwendet mit einem sehr kleinen Lichtspot. Leider konnte ich nichts passendes finden. Mit dem Suchbegriff “Fat Beam Laser” lassen sich jedoch Lasermodule finden, die einen wenige Zentimeter großen Punkt erzeugen. Im Bild sind das die beiden Aluröhren mit 532nm (Grün) und 405nm (Violett).

Im Inneren befindet sich die Laserdiode, dessen Licht durch eine Linse im vorderen Bereich des Aluminiumrohrs kollimiert wird. Da günstige Laser neben der gewünschten Wellenlänge oft Infrarotlicht ausstrahlen habe ich bei dem rechten bereits einen Infrafrot Sperrfilter eingesetzt, welcher mir beim Ausschlachten der Kamera in die Hände fiel. Später dazu mehr.

Laserdioden werden mit Konstrantstrom betrieben. Der Treiber dafür befindet sich im Kabel. Mit dem Potentiometer lässt sich die Stromstärke einstellen.


Die Litzen mit PVC Mantel habe ich durch Silikonkabel ersetzt, damit sie etwas länger halten und sich besser verlegen lassen. Zusätzlich kam eine gedruckte Kappe auf den Kabeldurchlass, da dieser am Movinghead seitlich heraussteht und beim Transport am ehesten schaden nimmt.



Der Movinghead soll für mich als Basis für verschiedene Ideen dienen und daher einfach von Laserpointer auf etwas anderes umgebaut werden können. Alle Befestigungen für den Laser sind daher einfach mit wenigen Schrauben wieder abnehmbar.
Der Tubus wird mit einer C-Klemme auf dem Pan-Motor festgeklemmt. Die Tilt Bewegung entsteht durch einen Spiegel im 45° Winkel zur Drehachse. Als Spiegel dient ein ausgesägtes Stück einer Festplattenscheibe (nicht die aus Glas).




Die Laser werden mit 5V versorgt. Über einen Transistor kann der ESP das Licht ein- und ausschalten.


Files:
git.ctdo.de/interfisch/ptz_movinghead