Miniquad
April 2015
Inhaltsverzeichnis
- Miniquad
- PID Dump

Irgendwann brauchte ich etwas Abwechselung vom langsamen rumschweben mit dem Tricopter. Ein FPV Miniquad ist da eine gute Alternative.
Ein gekauftes Frame kommt aufgrund des Preises und meinem Stolz als Bastler nicht in Frage. Also hab ich Anfang diesen Jahres (2015) damit begonnen, folgendes Modell ins Inventor zu hacken.
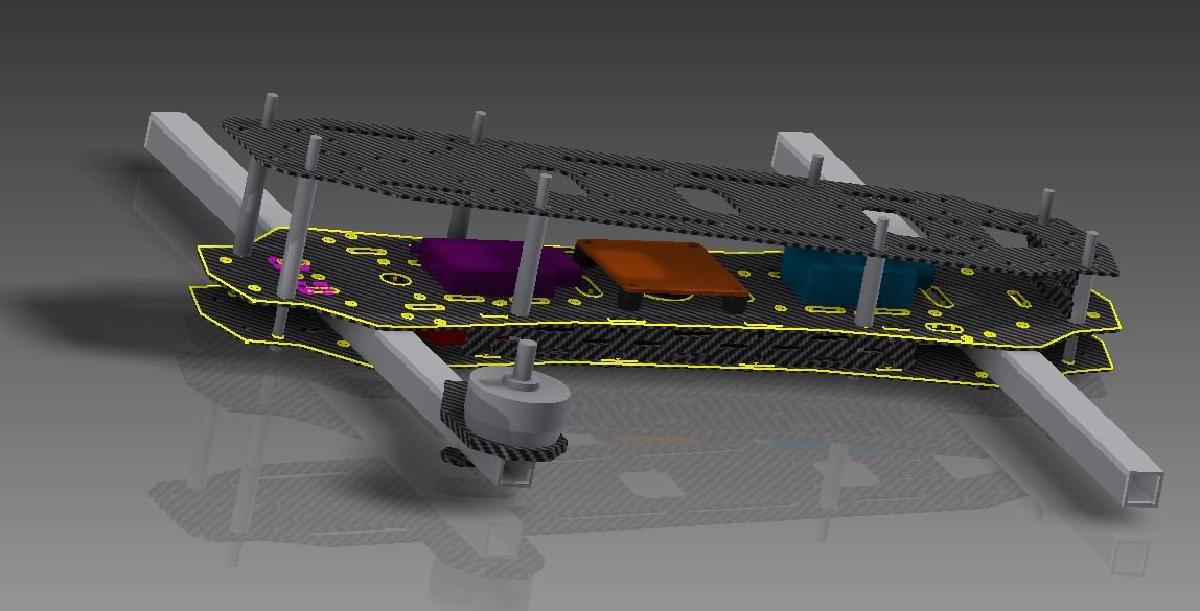
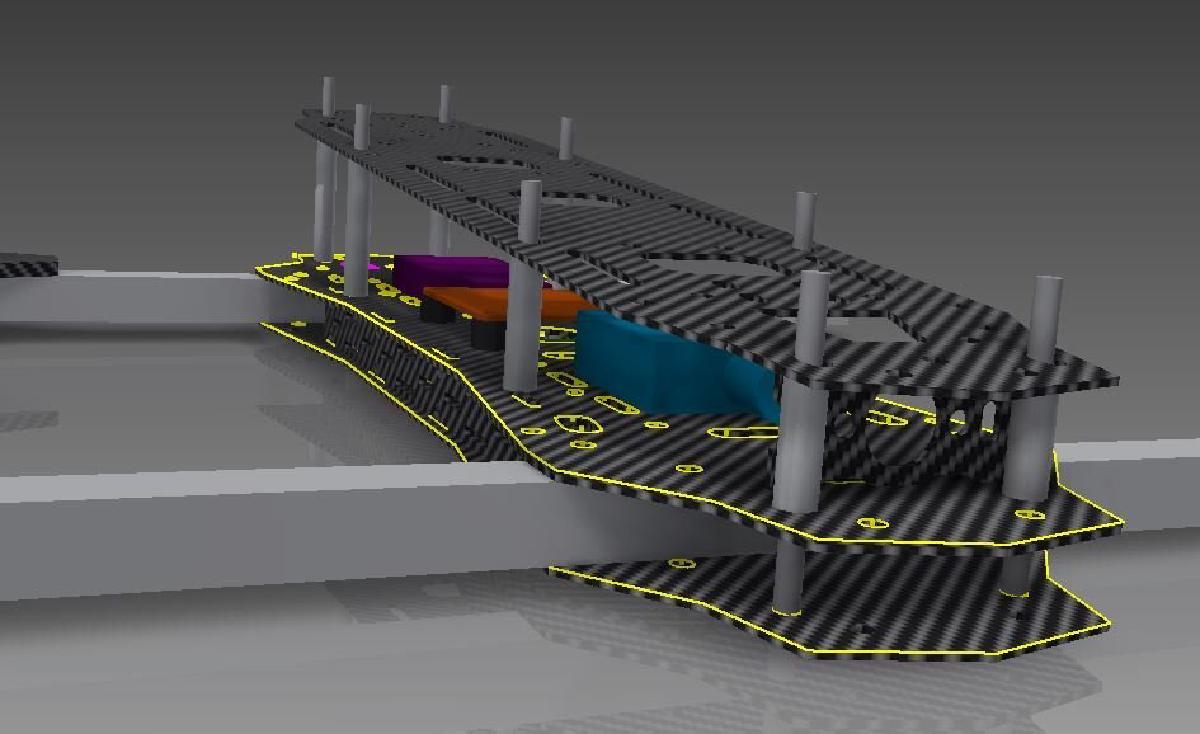
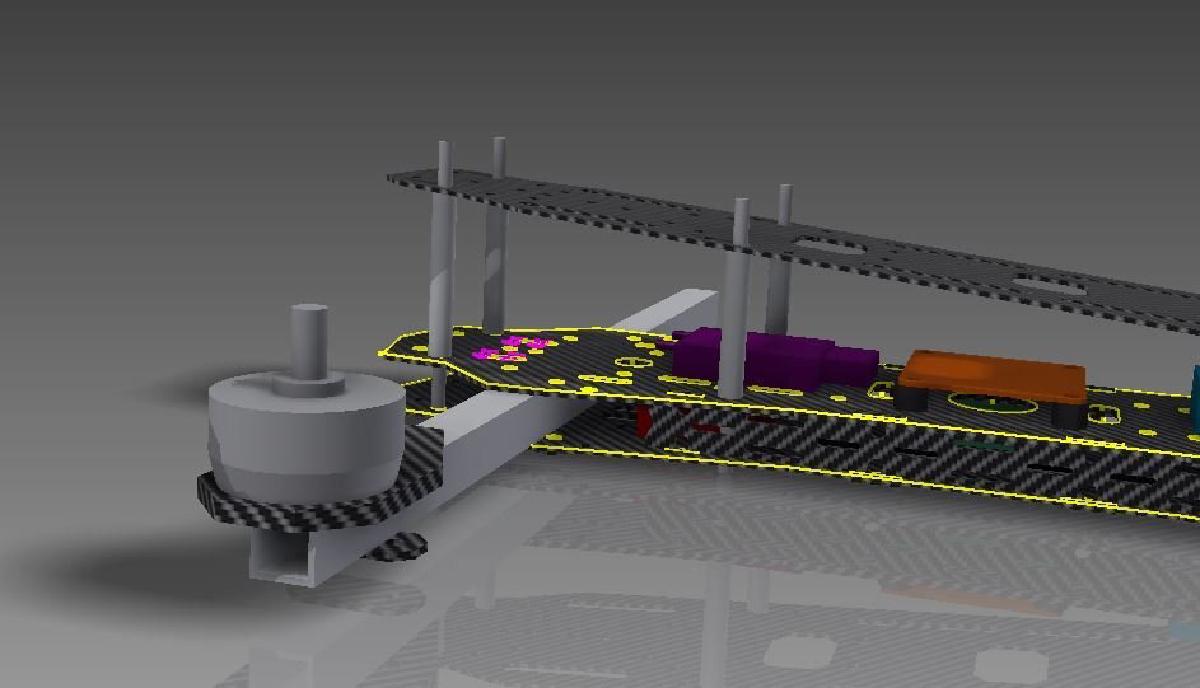
Statt der flachen Carbonarme die man oft bei Miniquads sieht wollte ich durchgehende Profile verwenden. Die Aluprofile sind vielleicht nicht so stabil wie Carbon, verbiegen sich aber eher statt zu brechen. Desshalb werden die Motoren auch nicht am 10x10mm Aluvierkant verschraubt, sondern nur geklemmt. Ebenso die Centerplates. Brechen oder verbiegen sich die Arme also bei einem Crash kann ich diese relativ schnell austauschen.
Weiterhin fällt auf, dass die obere CFK Platte leicht gewinkelt zur Centerplate ist. Normalerweise werden die Kameras etwas nach oben geneigt (bzw. die Motoren nach vorne gekippt), um beim Vorwärtsflug nicht nur Boden zu sehen. Da aber im hinteren Teil des Copters nichts hin muss was sehr hoch ist, kann ich mir den Platz dort auch sparen. So kann nun die Mobius flach montiert werden und ist bereits etwa 5° geneigt.
Zu den technischen Innereien:
- Naze32
- Kiss 12A ESC
- Sunnysky x2204s
- HQProp 6030, GF 5045, DAL 5040
- 5V BEC
- Frsky D4R-II
- 1000-2200mAh 3S Lipo
- Mini 600tvl Sony Super Had (5-22V)
Um nicht gleich das CFK zu zerfräsen hab ich die drei Platten vorerst aus Hartfaser gefräst und den Prototyp zusammengebaut.

Die CFK Platten hab ich bestellt bei Hadeg-Recycling.
Die untere Centerplate besteht aus 1mm, die dadrüber auf etwas dickerem 1.4mm CFK. Ebenfalls 1mm CFK hab ich für die oberste Trägerplatte verwendet. Links und rechts zwischen den Centerplates werden zwei 1.4mm dicke CFK Streifen eingeklemmt.
Die Motorträger müssen bei einem Crash wohl das meist aushalten und sind desshalb 3.2mm dick. Für die kleinen Platten auf der Unterseite zum anschrauben reichen 1.4mm aus.



Die Powerdistribution besteht aus einer doppelseitigen Platine in der größe einer Naze32 (Lochabstand 30,5mm).
An den Seiten war noch Platz für jeweils zwei Rote LED’s.


Bei dem BEC von XXL-Modellbau musste ich den Elko an der Eingansseite entfernen, damit die Platine noch zusammen mit dem PDB zwischen die Centerplates mit 10mm höhe passt.
Die Signalmasse hab ich zusätzlich noch direkt an den BEC Masseausgang gelötet. Alle vier ESC Signalleitungen gehen in ein 4 Poligen Stecker. Bevor ich die ESC’s eingeschrumpft hab hab ich noch den Jumper JP1 gesetzt, somit nehmen die Regler nurnoch Oneshot125 Steuersignale an. Unter Baseflight müssen dazu die Features “SYNCPWM” (für Oneshot) und “FASTPWM” (für die 125us) aktiviert werden.



An der Naze hab ich auf alles unnötige verzichtet und versucht, möglichst Flach zu bauen. Dadurch sind so ziemlich alle Stiftleisten gewinkelt und auf der Unterseite angebracht. Der D4R Empfänger kann durch brücken der Signalausgänge 3 und 4 CPPM auf Kanal 1 ausgeben. Dadurch reicht ein kurzes Stück Servokabel mit Stecker.


Zurück zur Stromverteilung; Diese wird von unten mit Plastikschrauben befestigt, welche auf der anderen Seite gleichzeitig die Flightcontrol halten. Zwischen Platine und CFK dient ein Reststück Schaumstoff als Abstandshalter und Isolierung. Fürs gute Gewissen hab ich dann doch noch zwei 100uF Elkos angebracht.


5V, Spannungsmessleitung und die ESC Singalkabel finden durch die großen Löcher in der Mitte ihren Weg nach oben. Dort werden sie von unten mit der Flightcontrol verbunden. Der Frsky Empfänger und der 5.8Ghz mini Videosender werden davor bzw. dahinter mit Klett angebracht.
Die beiden 16AWG Silikonkabel zur Verbindung mit dem Lipo passen wunderbar durch zwei Langlöcher an den Seiten kurz vor den hinteren Armen.
Wer genau hinsieht wird entdecken, dass der Micro USB Anschluss der Naze an der Seite herausschaut. So kann ich nachher viel einfacher den Copter mit dem Rechner verbinden. Das Board hab ich also um 90° nach rechts gedreht. In der CLI gibt man dazu ein: “set align_board_yaw=90”



Als Abstandshalter dienen 6mm (außen) Alurohre mit den Längen: 15mm, 22mm, 28mm und 35mm. Diese sind an einem Ende etwas angeschrägt.
Die entsprechenden M3 Schrauben sind entsprechend: 40mm, 45mm, 54mm und 60mm lang.


Je zwei kleine Gummiringe sollen die obere Platte minimal Dämpfen.


Die 5.8Ghz Antenne ist mit einem Aircell5 Kabel an einem RG58 Stecker aufgebaut. Sie wird innen angeschraubt und durch eine kleine Platte am hinteren Ende davon abgehalten, sich in die Propeller reinzuverbiegen. Das Loch ist mit 10mm Durchmesser gerade so gross, dass der RP-SMA Stecker durch passt.

Die Silikonkabel sind mit Kabelbinder als Zugentlastung an der oberen Platte festgemacht.
Der Lipo wird oben drauf mit Klett festgezogen. Die dünnen Schaumstoffflächen sollen den Lipo vorm Verrutschen schützen. Hier nich zu sehen, aber unter der Mobius hab ich auch solche Schaumstoffteile als Vibrationsdämpfer angebracht. Eventuell werde ich diese aber durch besseren Vibrationsschutz austauschen.


Kurz noch Motoren verlötet, Drehrichtungen überprüft und die Kabel mit Kabelbinder am Arm festgezogen.
Weil ich so ein unglaublicher Rebell bin drehen meine Motoren andersrum als in der Anleitung des Naze32. Also der Propeller vorne rechts dreht rechtsrum (im UZS). Wenn man dran denkt die yaw_direction in der CLI auf -1 zu stellen (“set yaw_direction=-1”) funktioniert das genauso wunderbar. Keine Ahnung ob es so rum ein Vorteil ist, ich sehe aber ebenso keinen Nachteil.

Und da isser fertig aufgebaut.
An den PIDs brauchte ich rein garnichts ändern, fliegt sich so schon wunderbar.
Mit den 6030 HQ Props (die Carbonverstärkten) an 3S bei einem Gewicht von etwa 560g (Flugfertig) fließen 7,7A Strom beim schweben, 32A Peak bei Vollgas aus dem Stand bzw. Schweb.
Und hier auch ein Zusammenschnitt der “spannendsten” Momente der ersten Flüge.
Und noch ein paar schnellere Wochenendflüge:
Juli 2015, der Quad hat nun schon so einiges mitgemacht. Die Aluarme musste ich hin und wieder nach sehr ungluecklichen Crashs zurückbiegen oder tauschen, der Rest hat sich aber gut bewährt.
Aus Kostengründen bin ich dann recht früh auf die halb so teuren Gemfan 5040 umgestiegen.

Hier mal ein paar Stromtests mit verschiedenen Props. Auf dem Minquad war dabei ein 3S 2200mAh Akku.
| Prop | Schweben | Peak |
|---|---|---|
| HQ 6030 | 7.7A | 32A |
| Gemfan 5040 | 6.8A | 31.1A |
| DAL6040 Bullnose 5" | 10A | 51A |
| DAL6040 Bullnose 4.5" | 7.2A | 43.8A |
Mittlerweile ist es 2016 geworden und es wurde das erste mal Zeit, das Frame komplett auseinander zu bauen zwecks Austausch der Nylonschrauben an der FC, die allesamt abgebrochen waren.
Zudem fing das Carbon vorne langsam an, zu zerfransen. Da mich auch der Dreck stört, der sich zwischen den Carbonplatten bei matschigen Crashs sammelt, kam dort ein 3D gedruckter Matschfänger rein.

Files
Hier noch die DXF Dateien: Version 20150326