Steck-Tricopter Aufbau
Februar 2014
Inhaltsverzeichnis
- Planung
- Aufbau
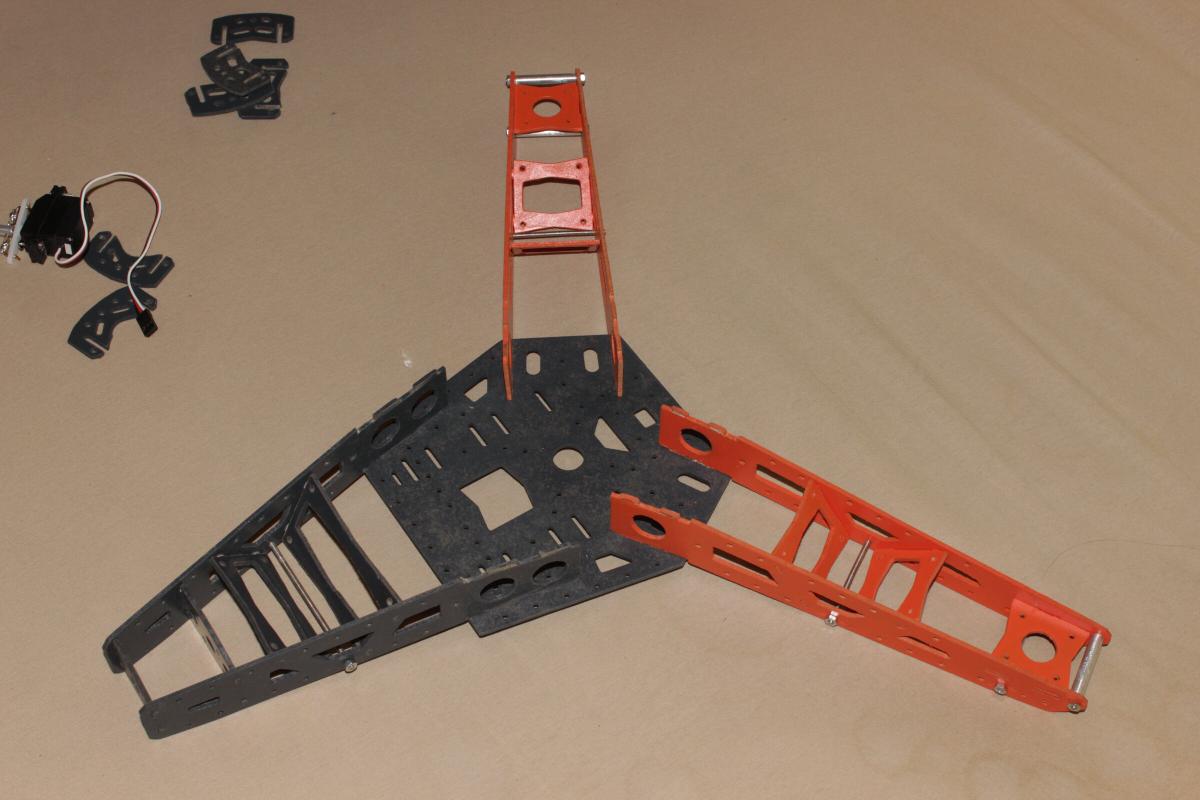
Nachdem das Frame in Inventor zusammenpasste konnten die Teile auch gefräst werden.
Um nicht gleich alles direkt aus teurem CF- oder GFK zu bauen sondern erstmal was in der Hand zu haben reichen mir 2mm dicke Hartfaserplatten.
Der erste testgefräste Arm hielt selbst aus dem labberigen Pressholz durch das Zusammenstecken erstaunlich gut. Also hab ich den Rest weiter aus Holz gefräst, wenn er nicht beim ersten Flug auseinanderfällt lass ich ihn eventuel komplett aus Holz. Zum rumflippen und heizen ist er primär nicht gedacht.
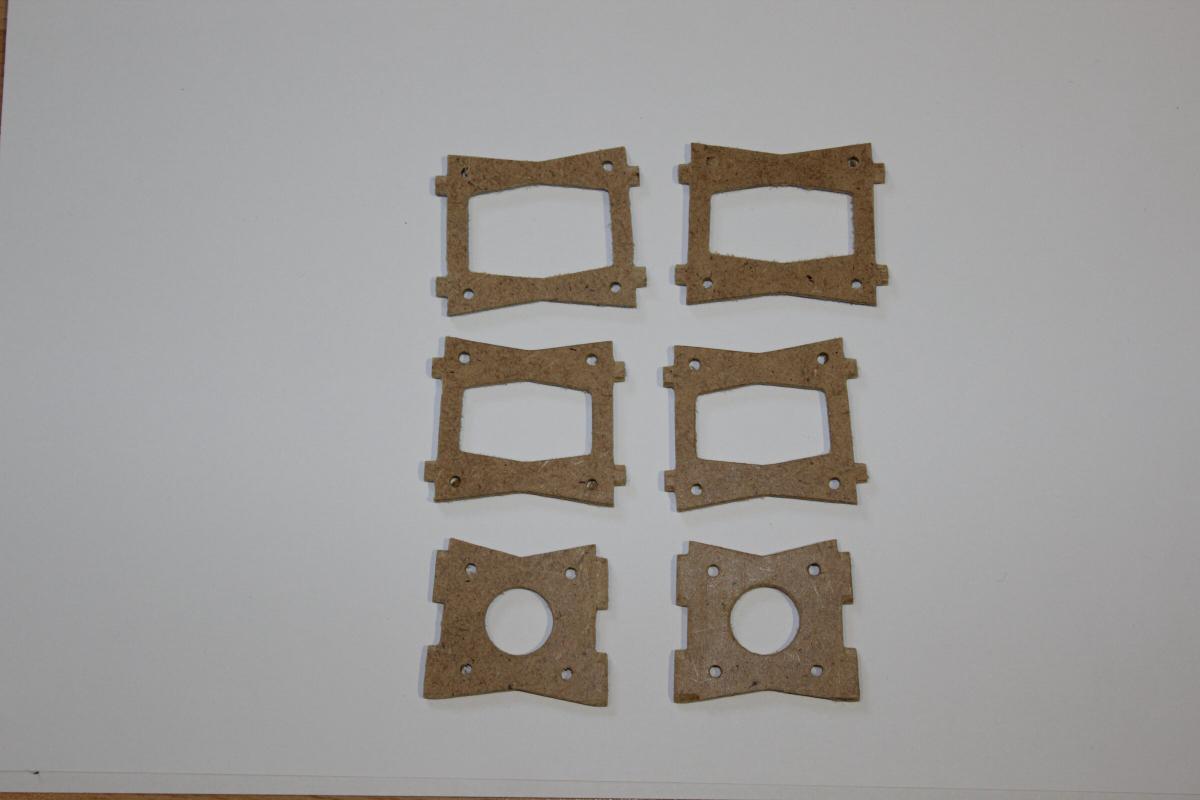
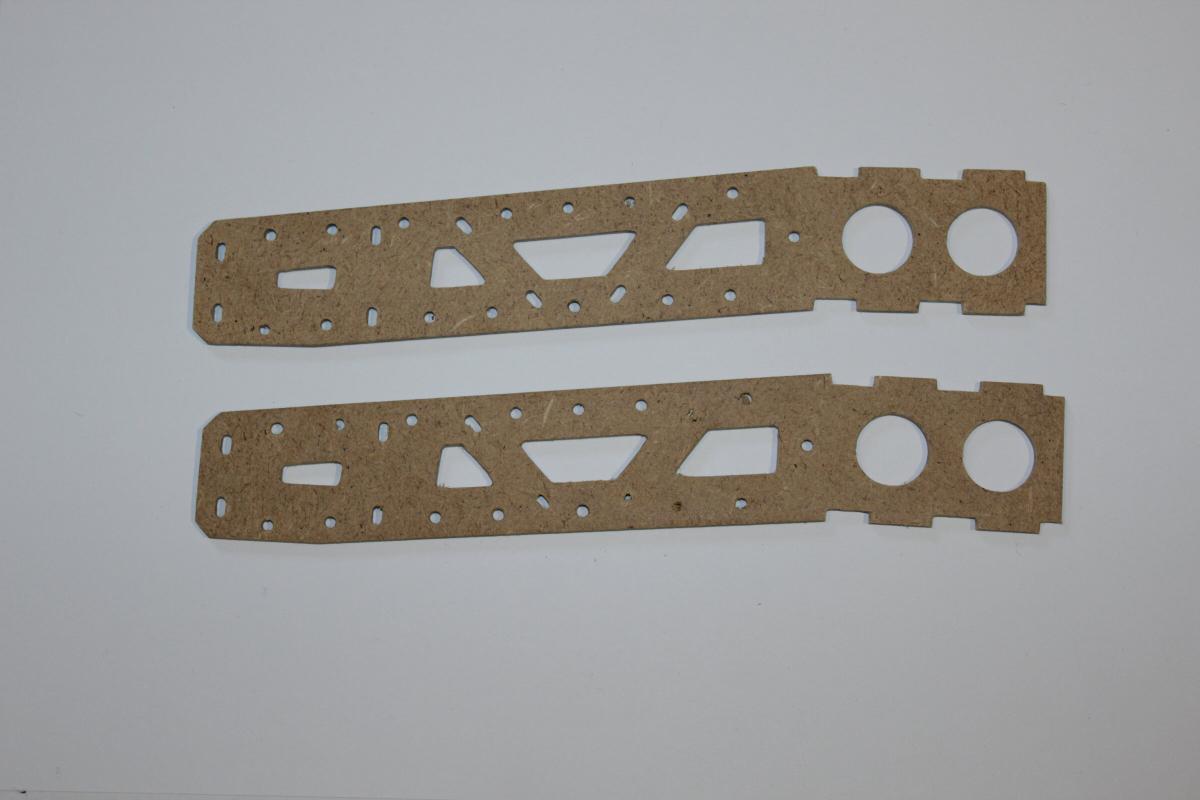
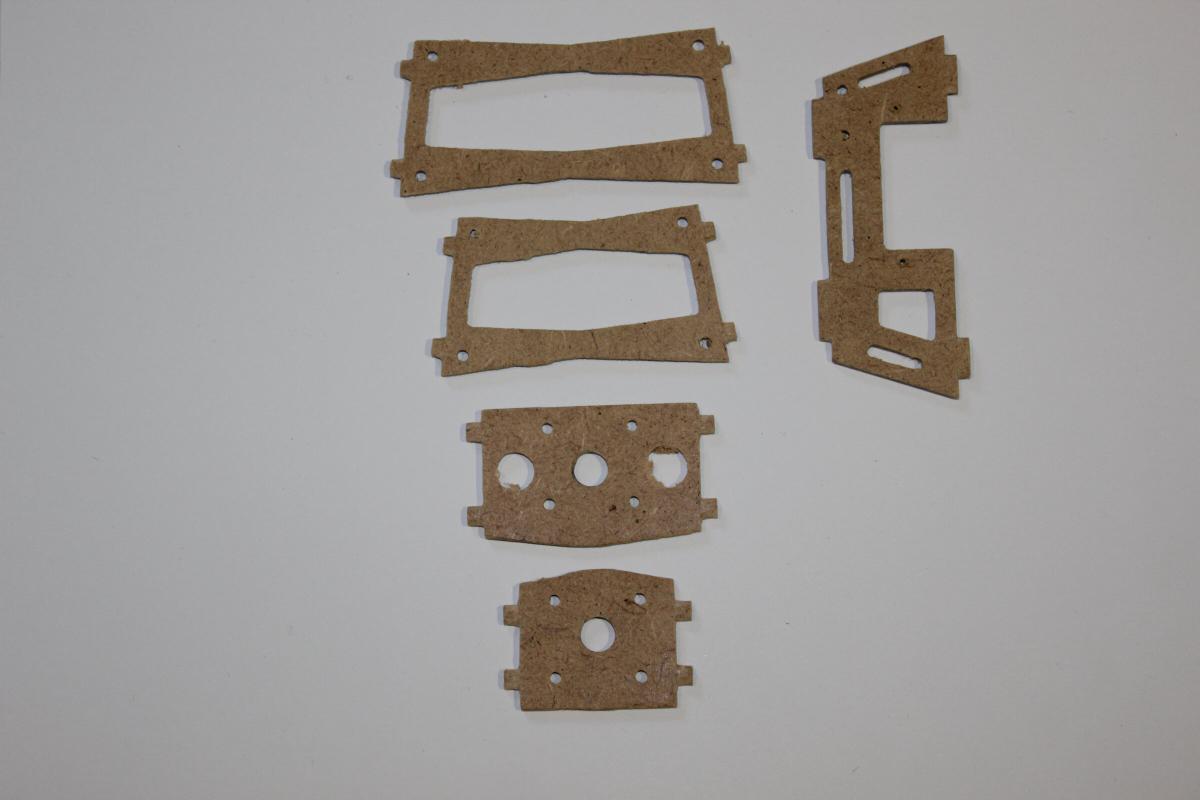
Hier die Teile, jeweils mit Dateinamen aus zuvor genannten Archiv (Steck-Tricopter: Planung). Das “*” steht für das angegebene Erstellungsdatum. Aufgelistet jeweils von oben nach unten, bzw links nach rechts.
Frontarme:
- 4x frontarm_*.dxf
- 2x arm_front_zwischenplatte_innen_*.dxf
- 2x arm_front_zwischenplatte_aussen_*.dxf
- 2x frontarm_motormount_*.dxf
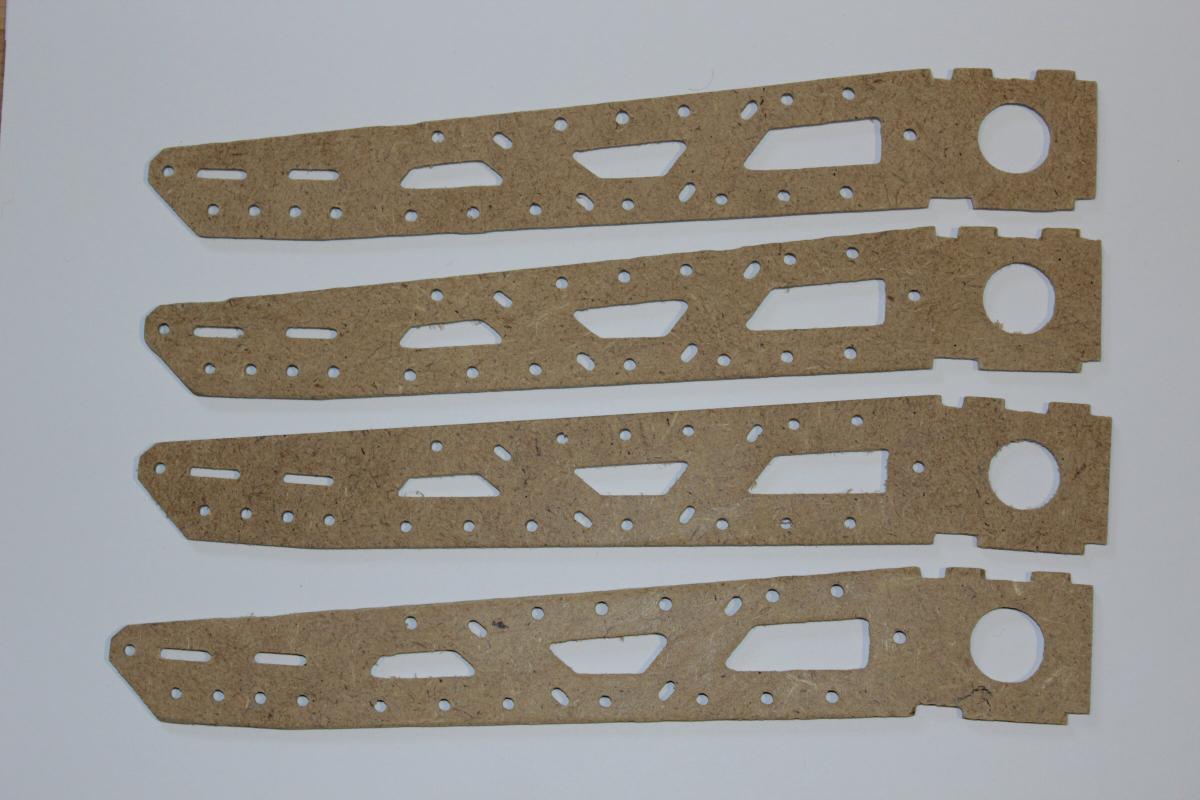
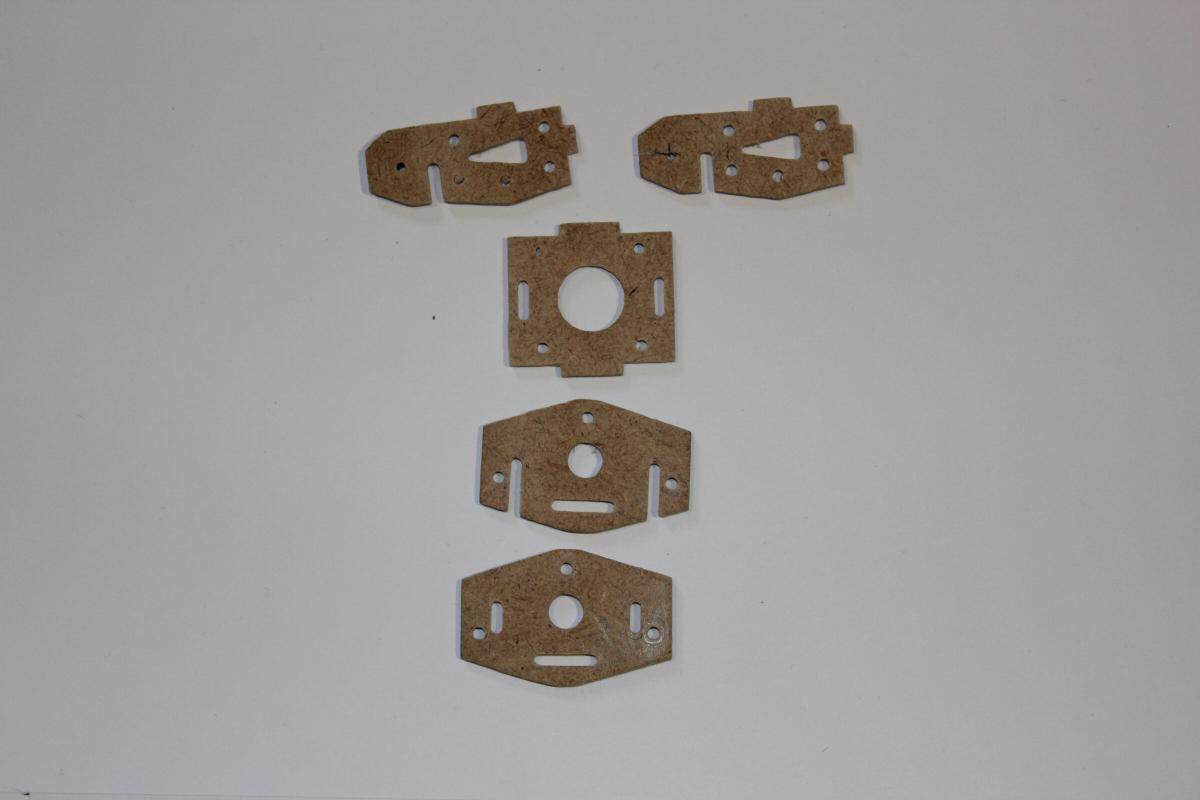
Hinterer Arm:
- 2x arm_rear_*.dxf
- 1x arm_rear_zwischenplatte_innen_*.dxf
- 1x arm_rear_zwischenplatte_aussen_*.dxf
- 1x arm_rear_yawplatte_innen_*.dxf
- 1x arm_rear_yawplatte_aussen_*.dxf
- 1x cp_servowall_*.dxf
Centerplate Klemmen und Yaw:
- 4x arm_front_cphalter_*.dxf
- 2x arm_rear_cphalter_*.dxf
- 2x arm_rear_yaw_seite_*.dxf
- 1x arm_rear_motorplatte_*.dxf
- 1x arm_rear_yaw_aussen_*.dxf
- 1x arm_rear_yaw_innen_*.dxf

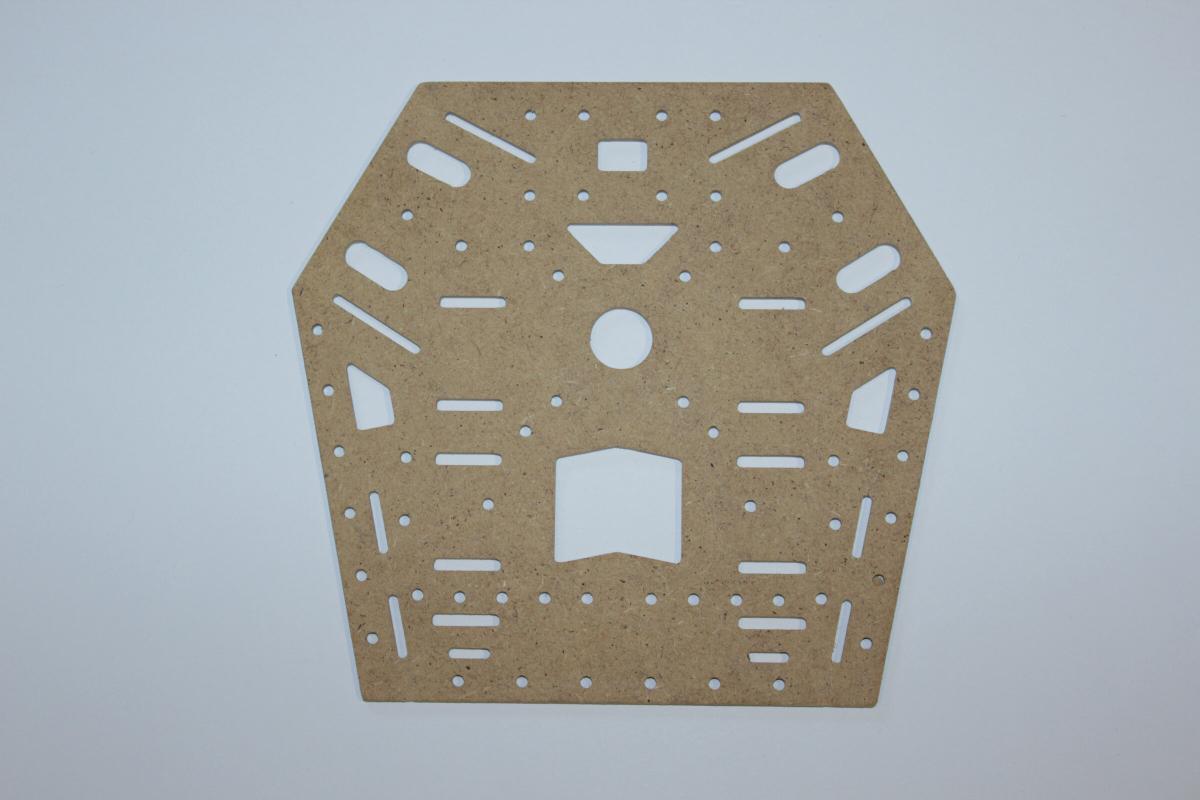
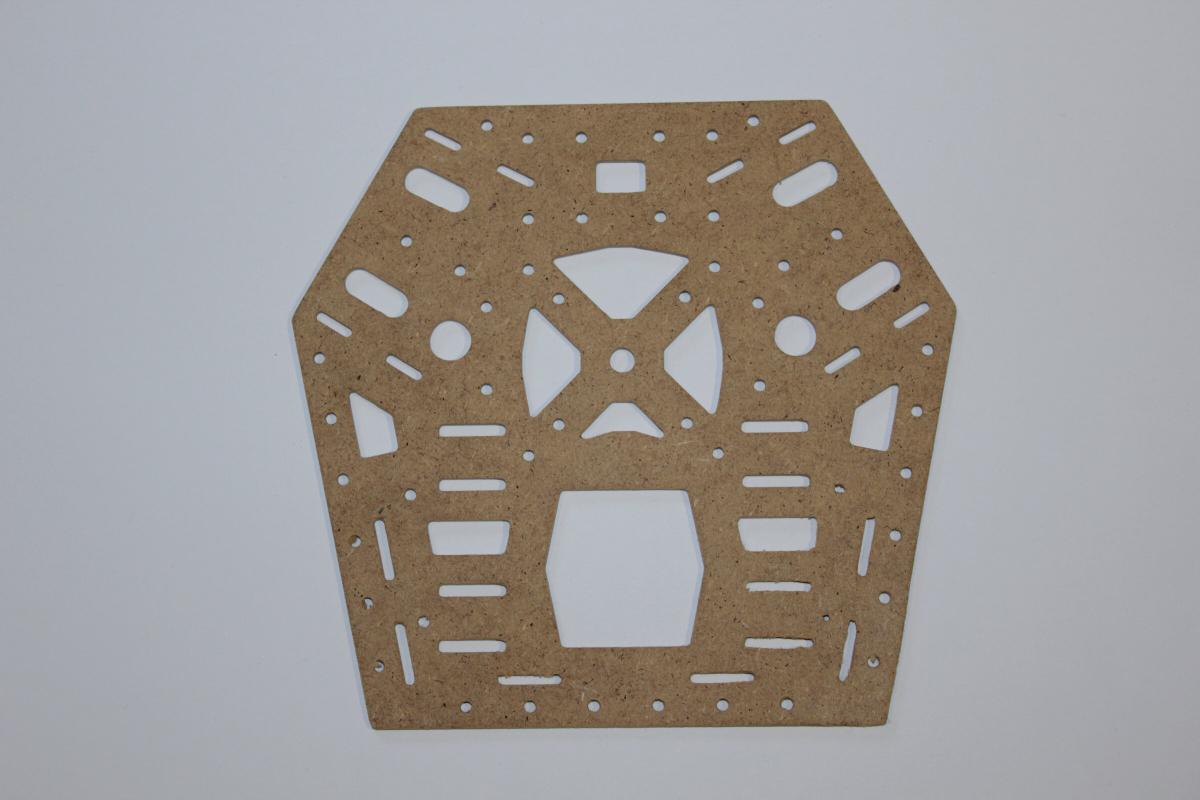
Centerplates:
- 1x centerplate_bottom_*.dxf
- 1x centerplate_top_*.dxf
Da nicht alles von selbst Zusammenhällt und möglichst wenig geklebt werden soll braucht es noch ein paar M3 Schrauben. Damit die Schrauben von der Länge perfekt passen hab ich eine M3 Gewindestange wie folgt zurechtgesägt:
-
2x 44mm (Frontarme aussen)
-
2x 46mm (Frontarme unter Motor)
-
2x 53mm (Frontarme mitte)
-
1x 52mm (Hinterarm aussen)
-
1x 81mm (Hinterarm mitte)
-
7x 40mm (3 für Yaw, 4 für Centerplate)
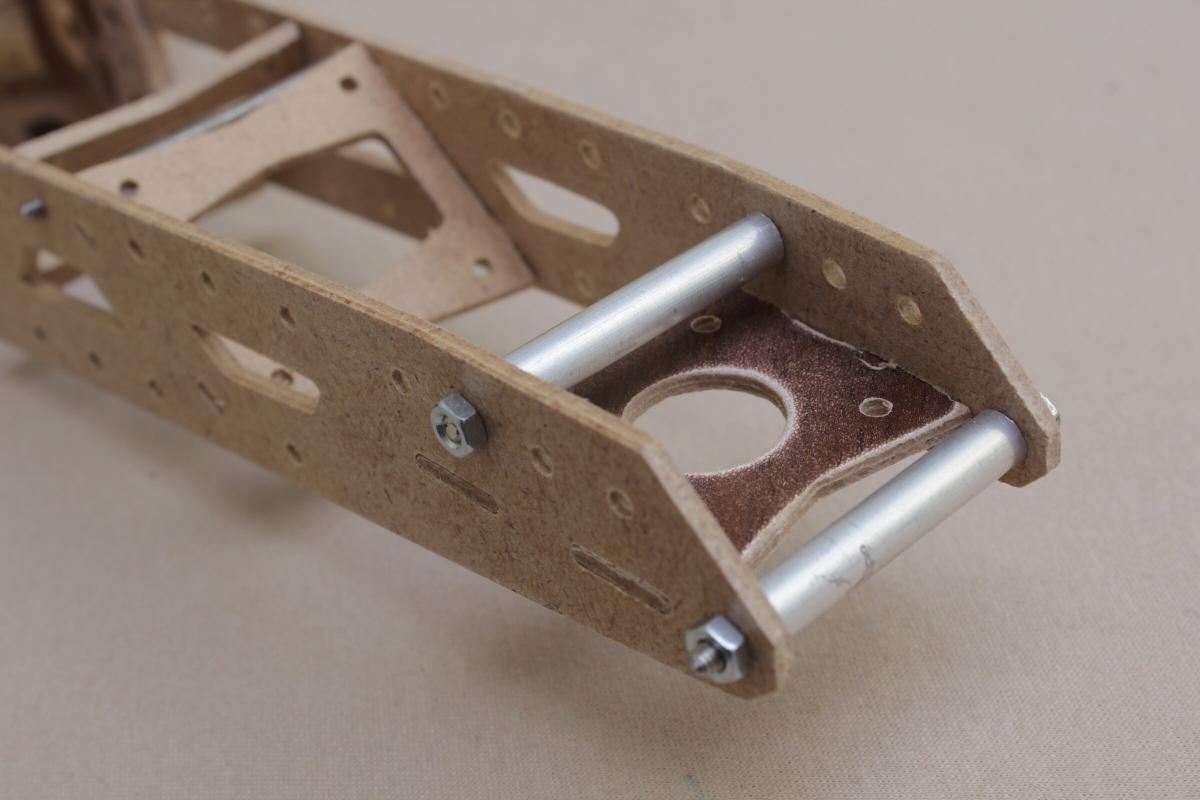
Von beiden Seiten kommen dann Muttern auf die Stangen. Damit sich das Ganze beim festziehen nicht verbiegt kommen auf einige Gewindestangen Alurohrstücke. Innendruchmesser mindestens 3mm.
- 2x 34mm (Frontarme aussen)
- 2x 36mm (Frontarme unter Motor)
- 1x 31mm (Yaw)
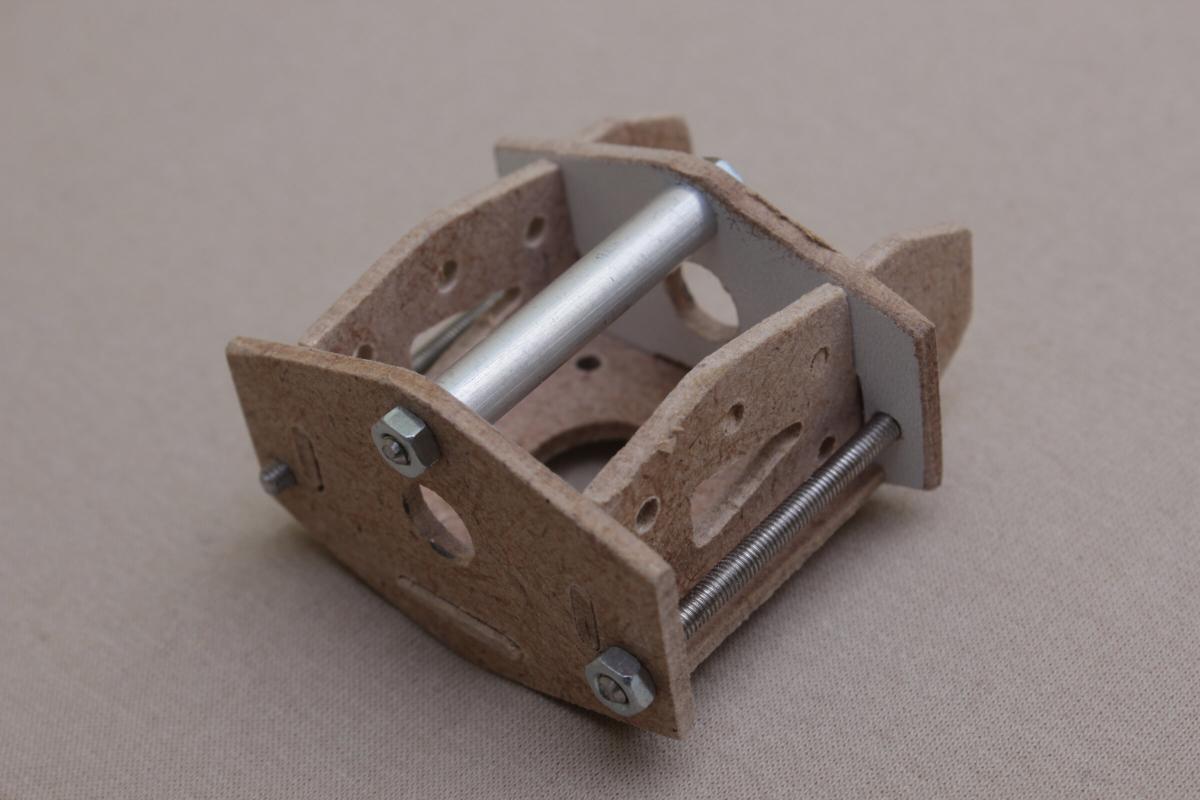
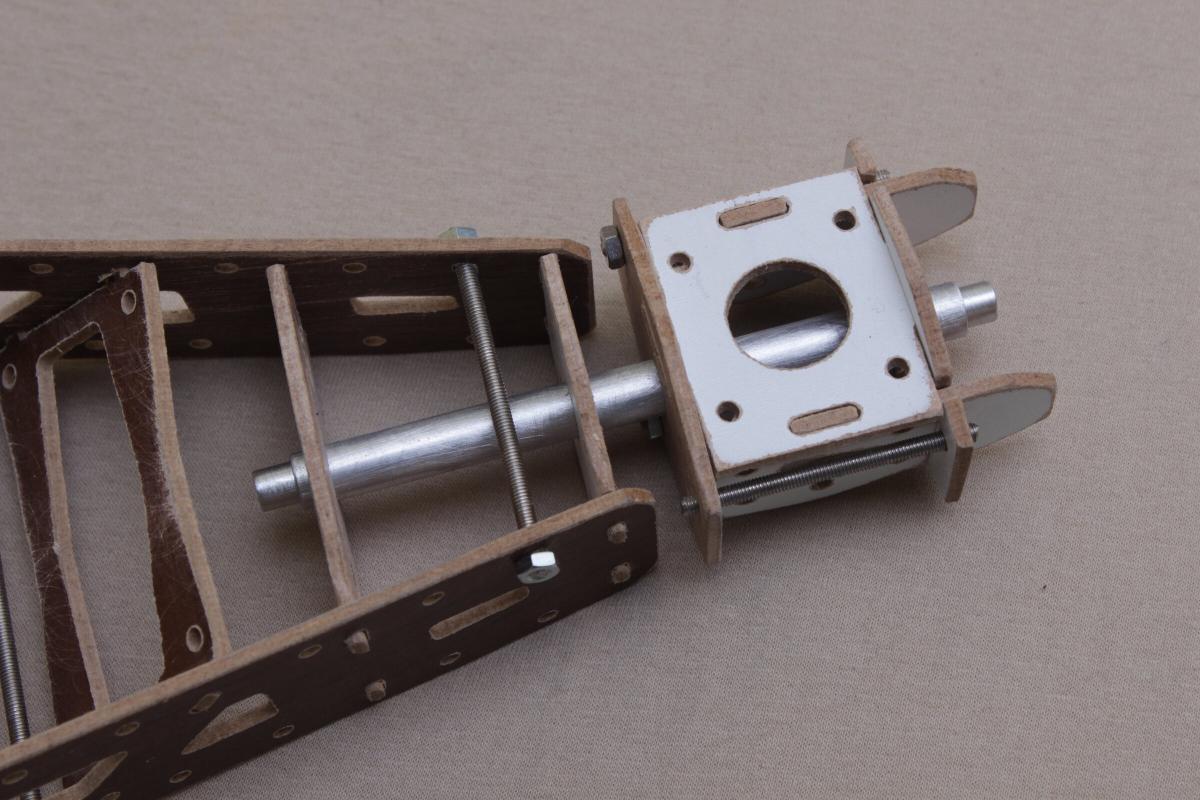
Der kleine “Kasten” für das Yaw wird auf ein 8mm Alurohr geschoben, welches sich nicht dreht. In dem 8mm Rohr wird sich ein 6mm Alurohr befinden, welches am äußeren Ende fest mit dem Yaw verbunden wird. Hier erstmal die Maße der beiden Rohre:
- 1x 95mm, Durchmesser innen=6mm, Durchmesser aussen=8mm
- 1x 105mm, Durchmesser innen=4mm (Innendurchmesser nicht so wichtig), Durchmesser aussen=6mm (Außendurchmesser = Innendurchmesser vom größeren Rohr
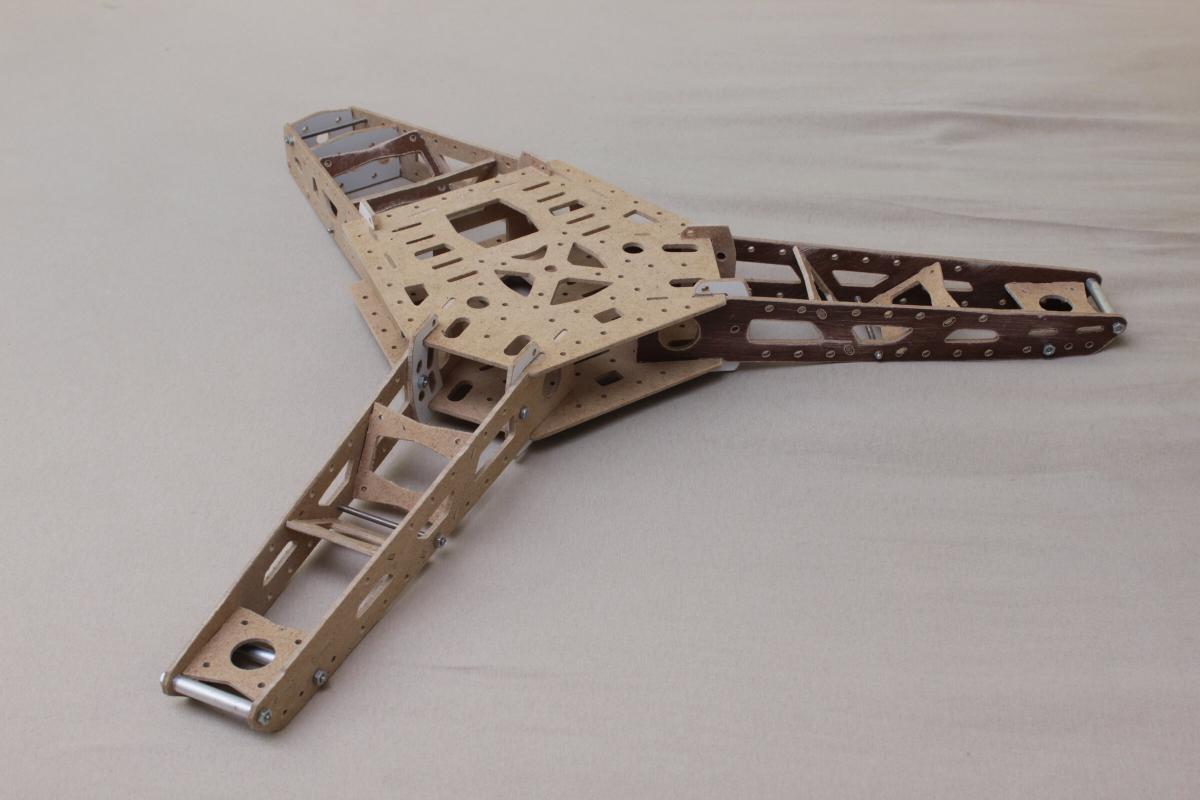
Mit diesen Bauteilen kann das Frame bereits zusammengesteckt und geschraubt werden und hällt von selbst gut zusammen.
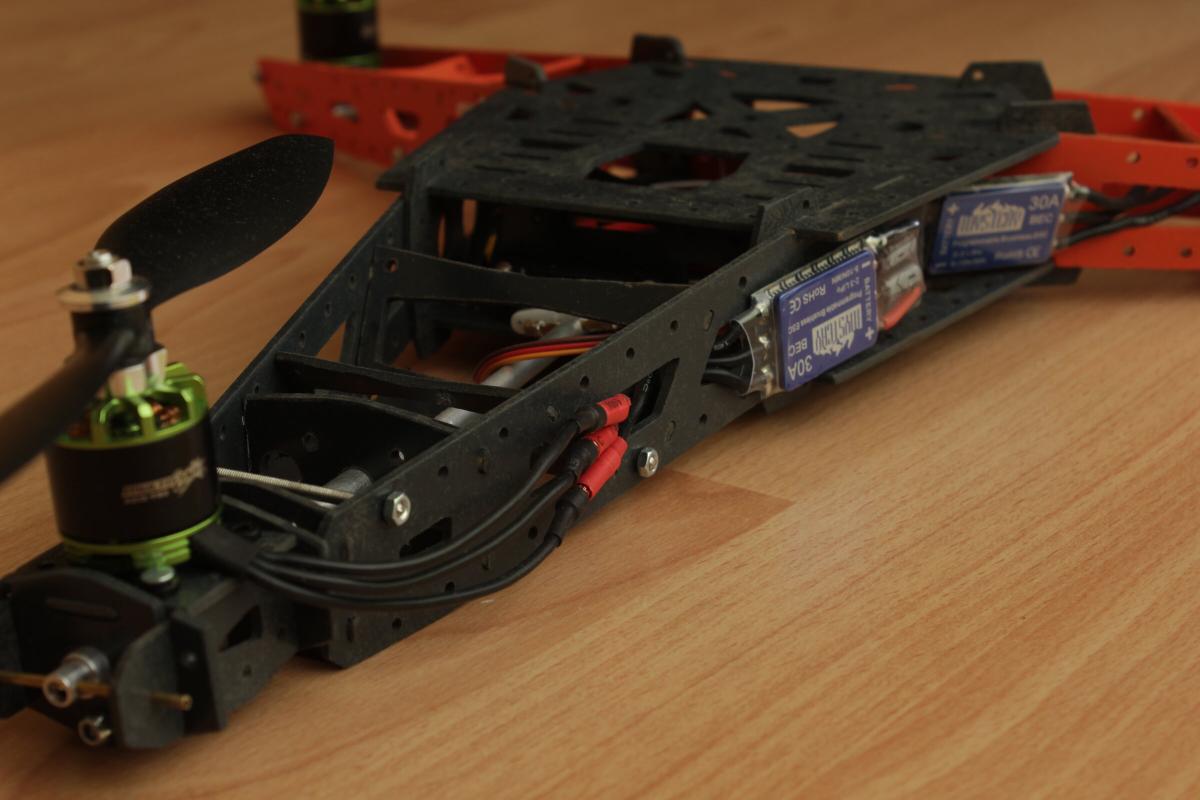
Hier ein Closeup vom äußeren Ende eines Vorderarms von unten.
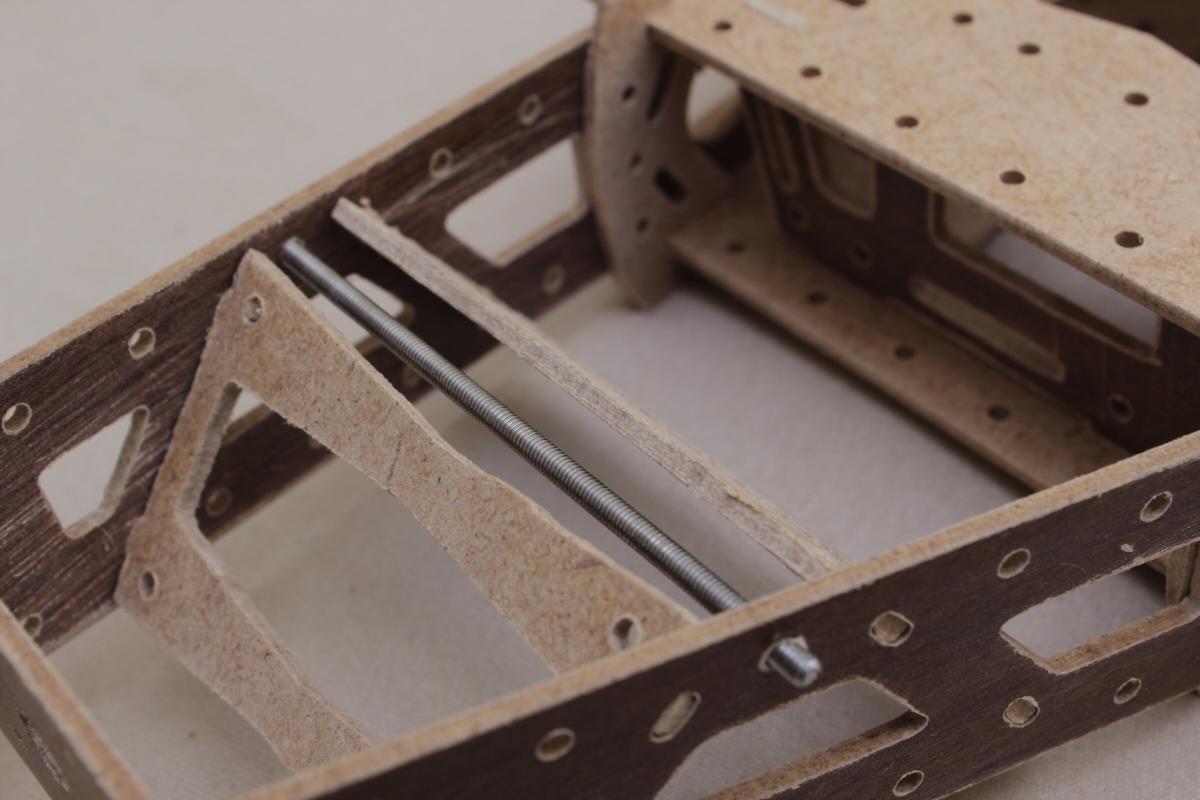
Die längste Gewindestange kommt an den hinteren Arm zwischen die beiden “Zwischenplatten”.
Der Yaw-“Kasten” ist etwas frickelig zusammenzustecken. Aufgrund der Steckkonstruktion mit mindestens einer Gewindestange fällt er nicht so schnell auseinander.
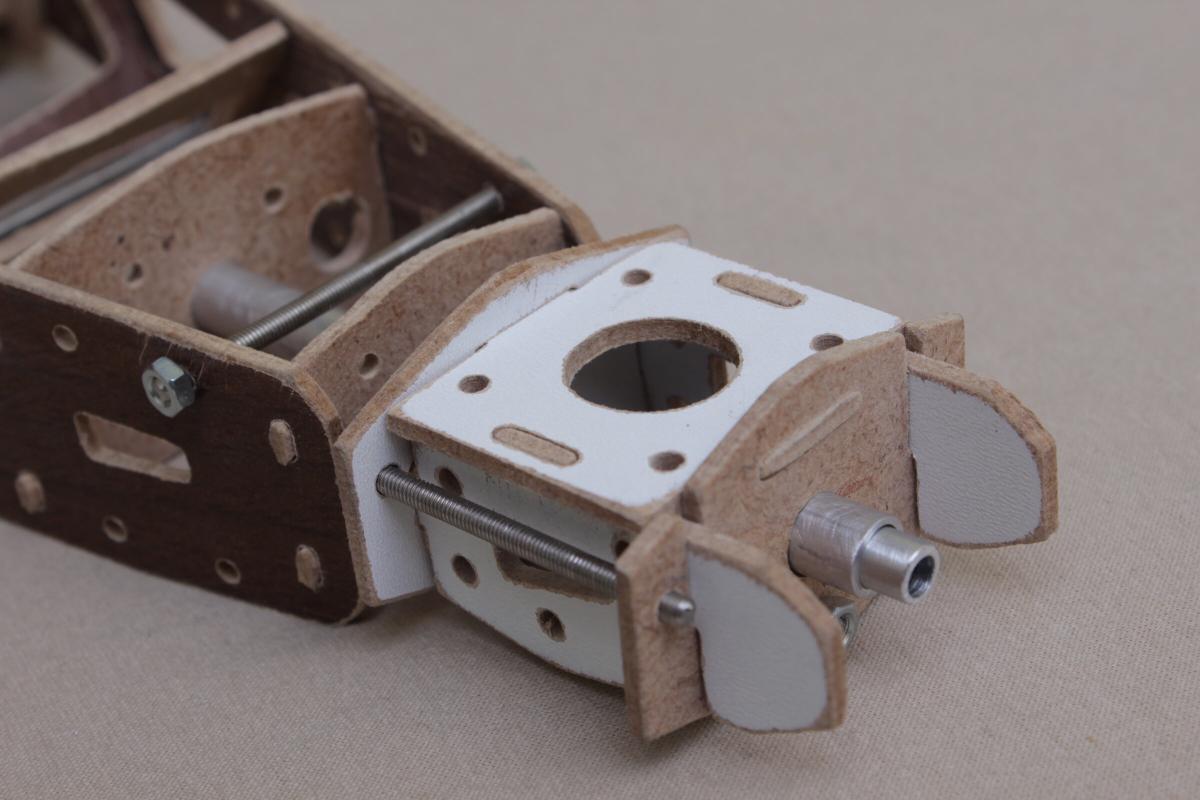
Mit einem dünnen Messingrohr durch ein passendes Loch am Ende des inneren Alurohrs ist das Yaw nun neigbar.

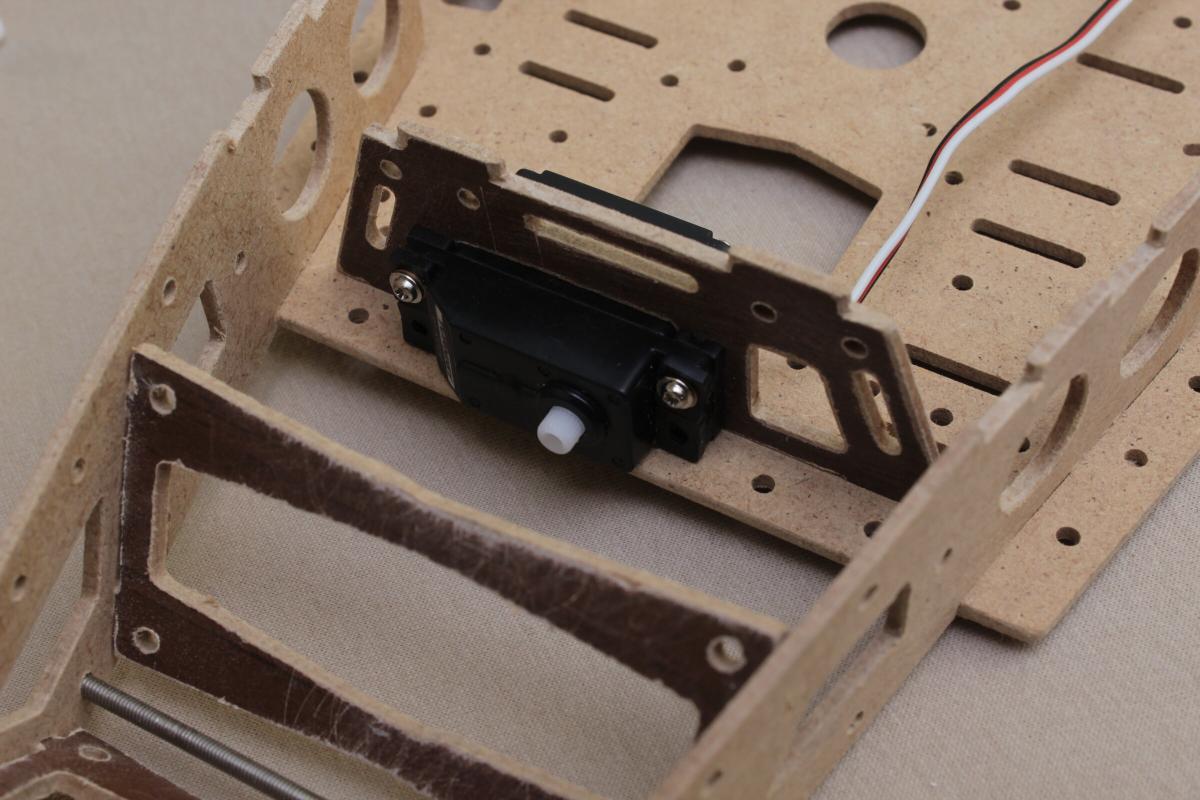
Fehlt nurnoch der Servo. Einen “Turnigy S3317B Servo 19g / 2.5kg / .14sec” (link) hatte ich noch rumliegen. Mit den beiliegenden Schrauben hab ich ihn einfach von außen in die “cp_servowall” geschraubt.
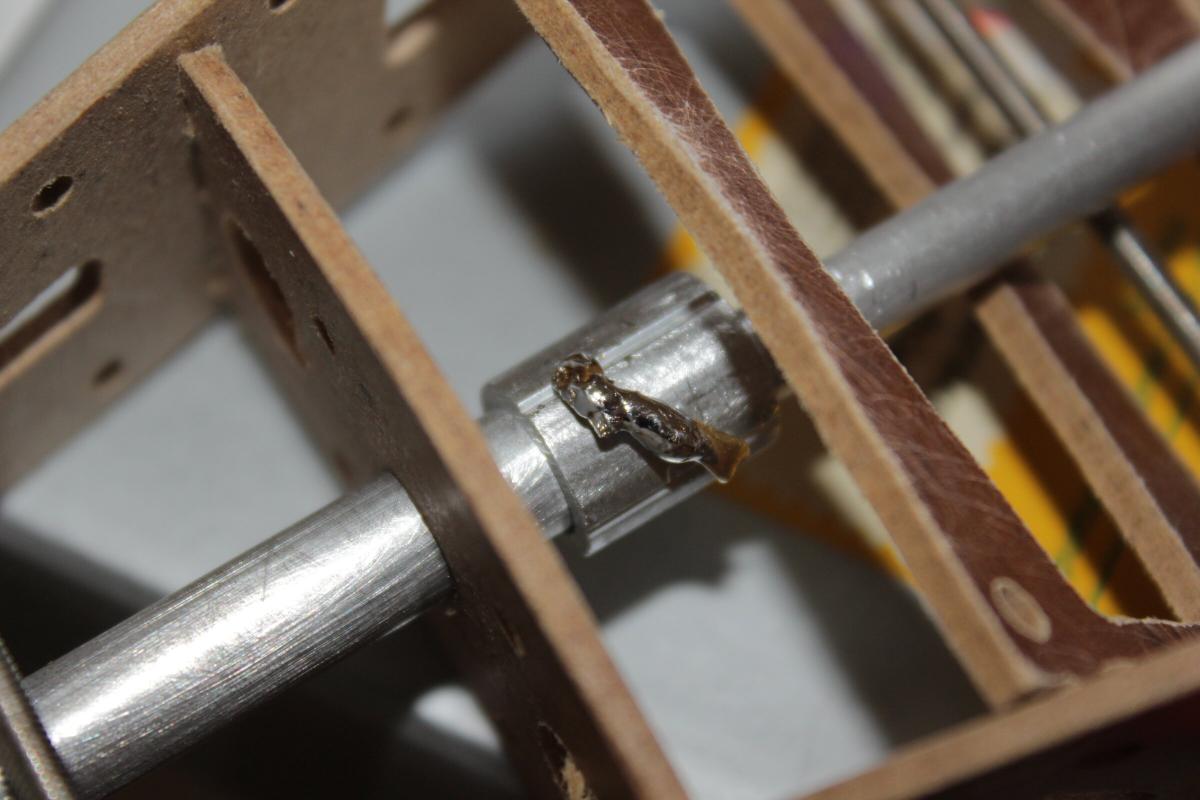
Da sich Messing recht gut löten lässt war kurze Zeit später eine Verbindung zu einem weiteren Alurohr hergestellt. Verwendet hab ich hier das Alurohr mit 6mm Außendurchmesser.

Da alle Arme einen leichten Knick nach unten machen verläft das Alurohr vom Servo zum Yaw nicht ganz gerade und benötigt daher ein Gelenk.
Dazu hab ich ein etwas größeres Stück Alurohr zwei mal über Kreuz und versetzt durchbohrt. Mit zwei Messingrohrstücken sind die beiden zu verbindenden Alurohre an dem Gelenk befestigt, sodass sie sich etwas bewegen können aber die Drehbewegung gut übertragen wird.
Lackierung
Wo nun alles zusammenpasst konnten die Teile lackiert werden. Wie schon erwähnt sollte es Anthrazit Grau und Orange werden.
Nach dem Lackieren hab ich die Holzteile kurz gewogen: 190 Gramm (+ etwa 90 Gramm für die Schrauben).

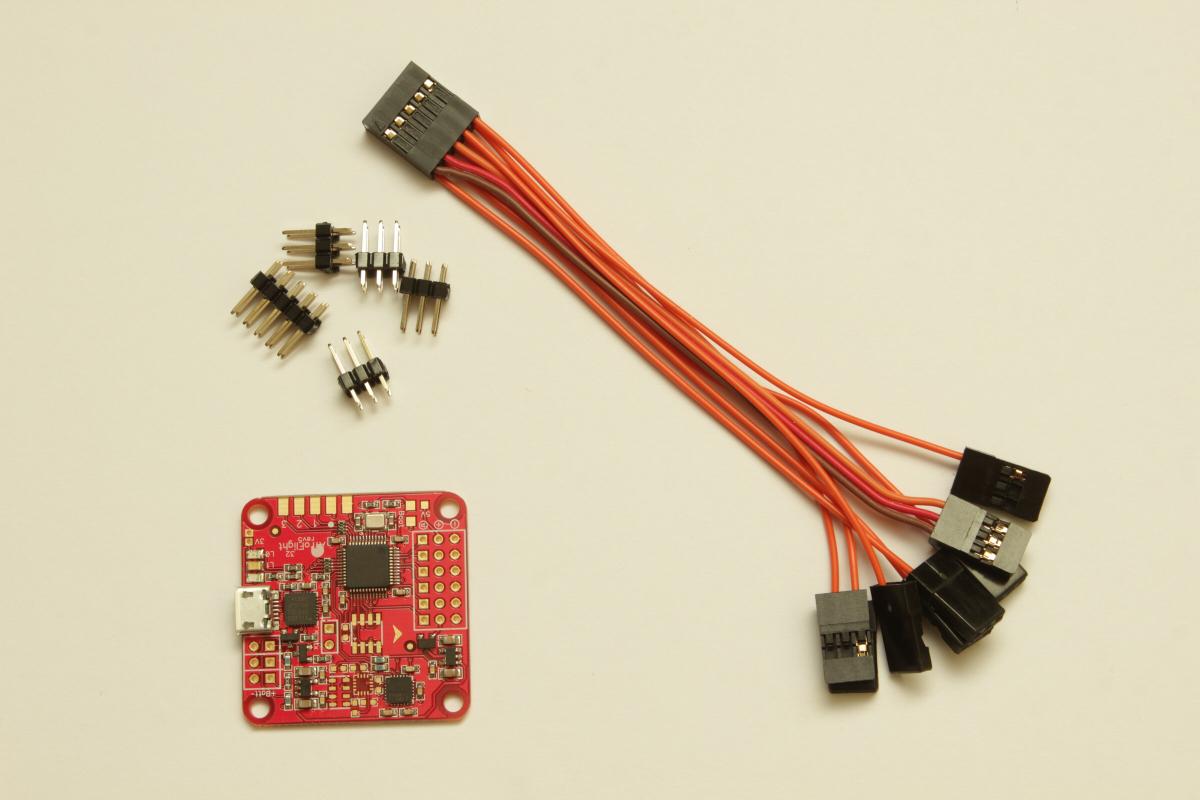
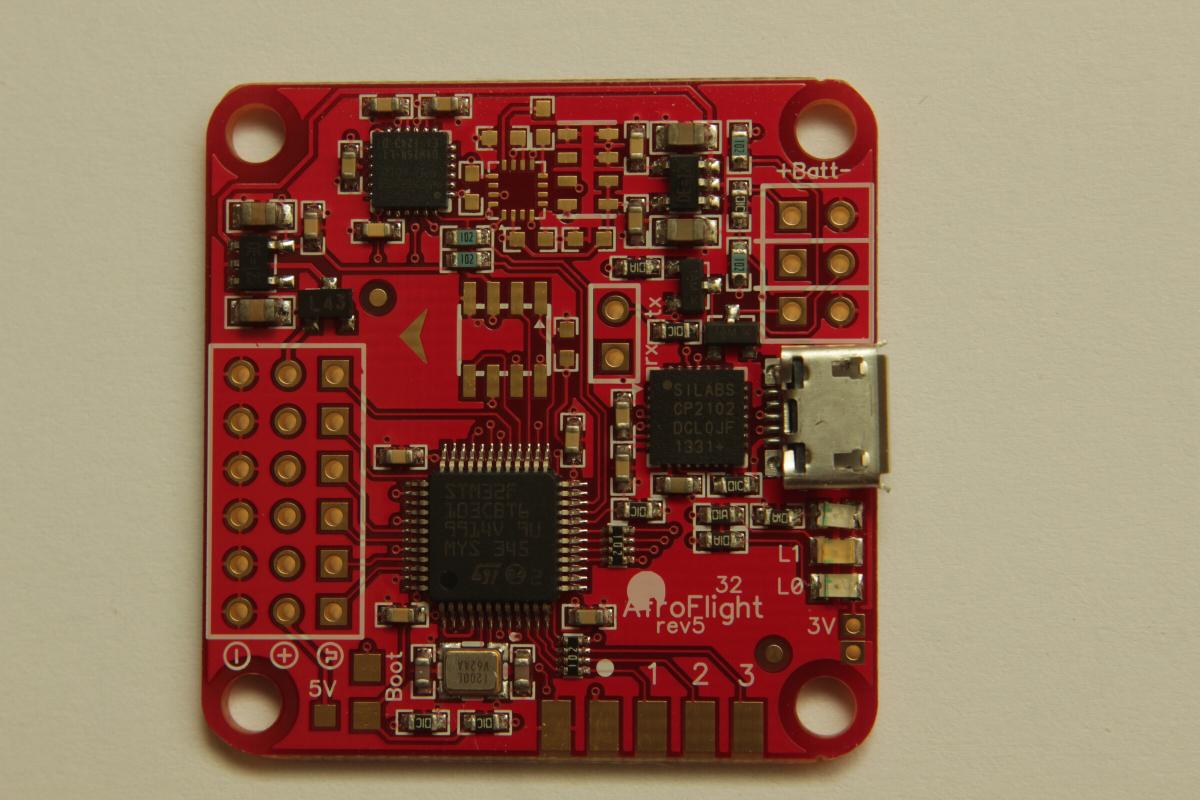
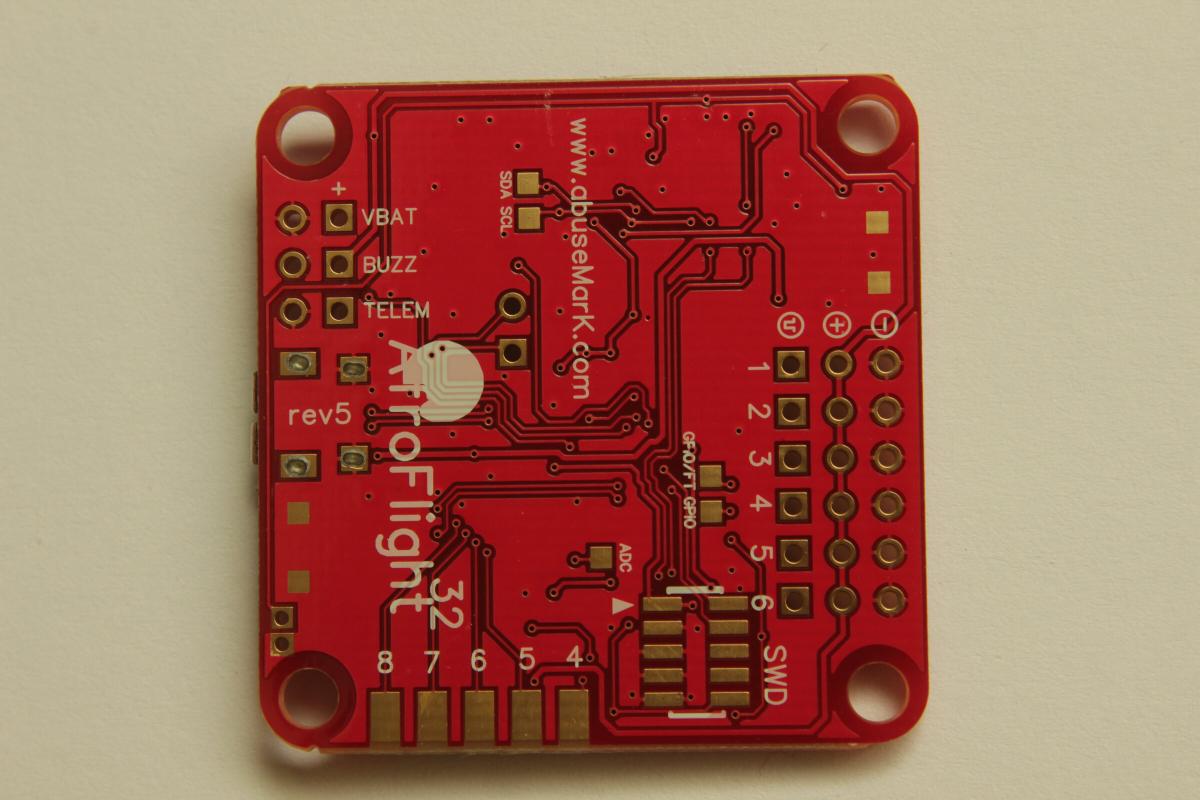
Flight Control und ESCs
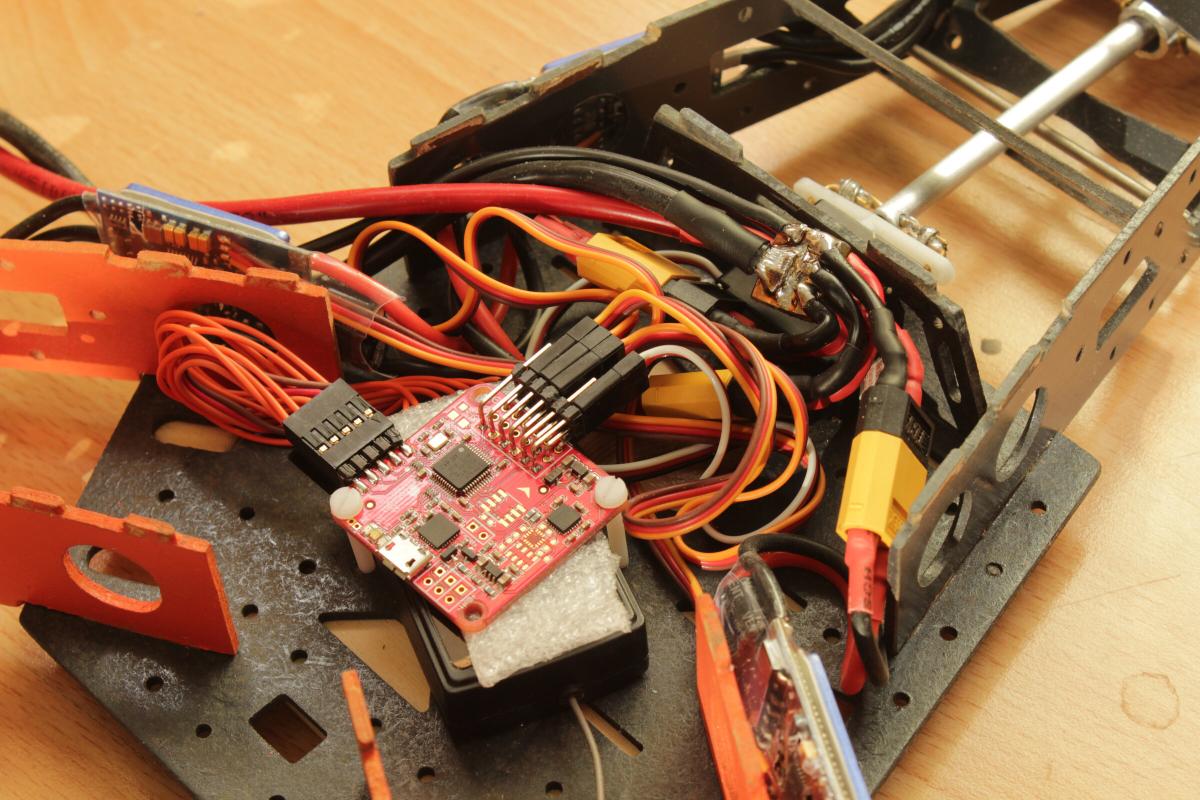
Bei der Flightcontrol entschied ich mich für das Naze 32, genauer das Acro Naze da ich nur zum rumfliegen Barometer und Magnetometer als überflüssig empfinde.
Leider waren gerade die Orangenen ausverkauft, aber Rot ist auch OK.
Da ich noch ein 30A Mystery da hatte hab ich mir einfach zwei weitere gekauft.
Um noch etwas mehr aus den Mystery’s zu holen hab ich auf alle drei SimonK geflasht. Welche Firmware benötigt wird kann man z.B. hier nachlesen. Für die Mystery 30A wird die bs.hex benötigt.
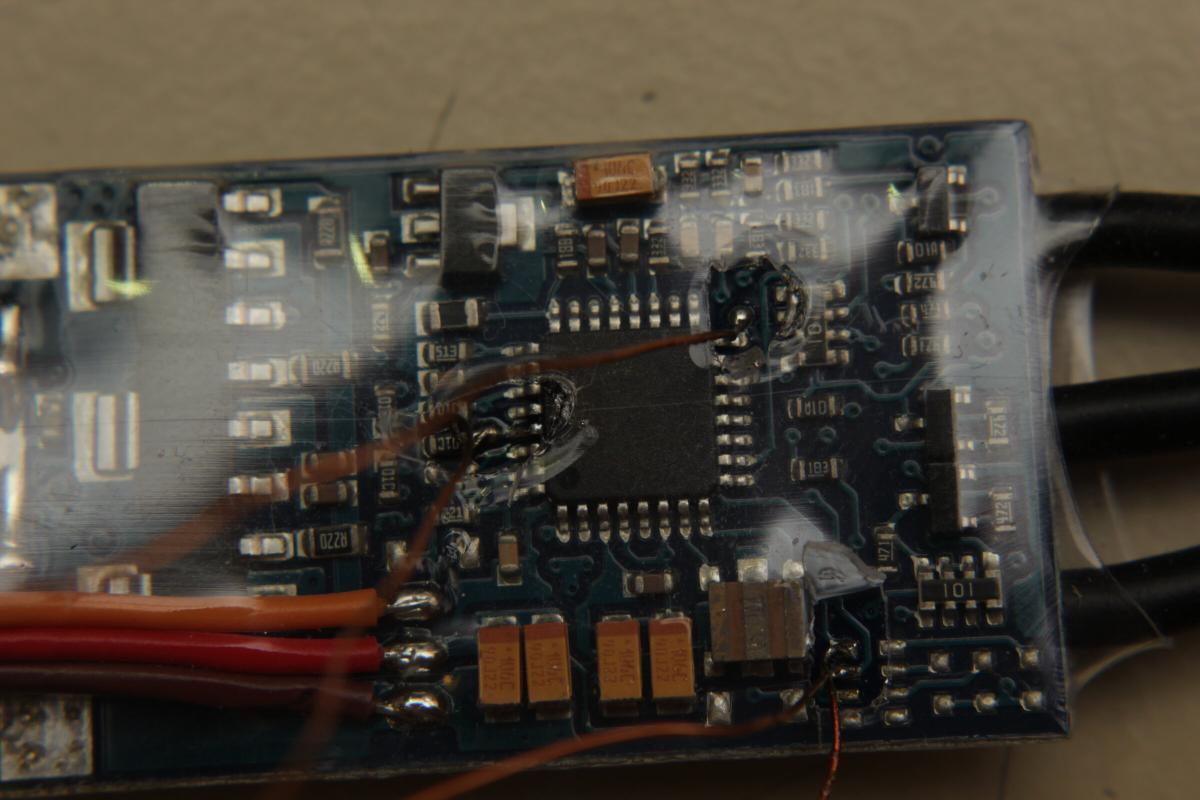
In der vergrößerten Ansicht vom linken Bild hab ich die Pinbelegungen eingezeichnet (zum Vergrößern Bild anklicken).
Reset kommt an das kleine Lötpad links vom Atmega8. SCK und MOSI an die beiden übereinanderliegenden Lötflächen unten rechts. MOSI kommt an das Lötpad oben rechts vom Atmega.
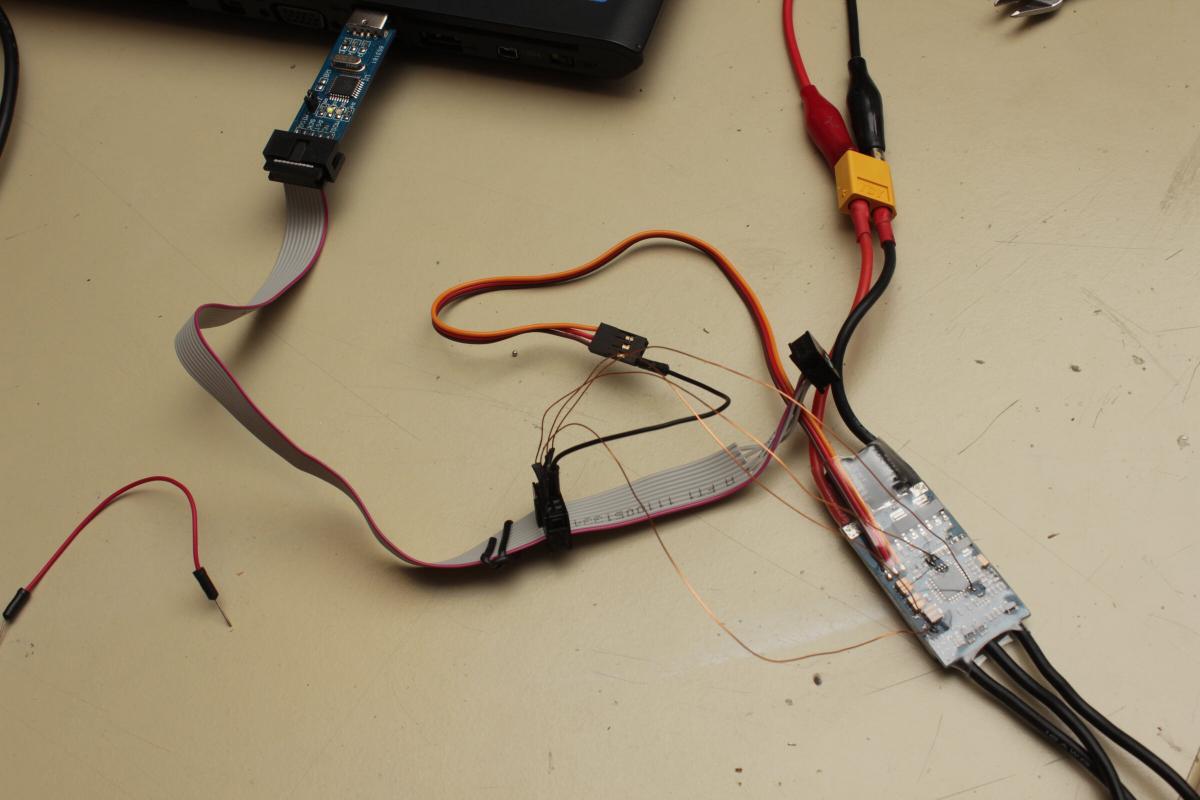
Desweiteren wird noch GND und 5V benötigt. Dazu hab ich ein Labornetzteil an das ESC angeschlossen (12V an den XT60) und beide Massen, also vom Netzteil und vom USBasp verbunden (über den Servostecker). Die 5V vom USBasp werden dann nicht benötigt.
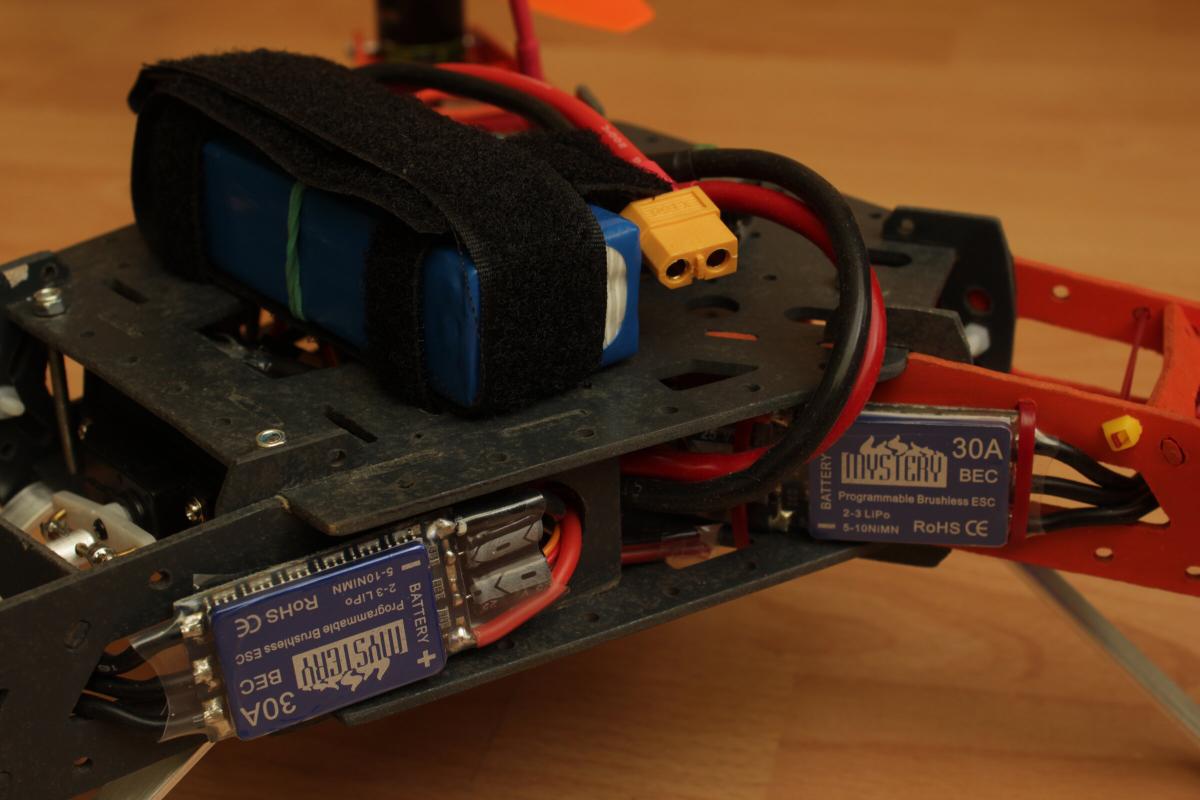
Dann alles zusammen in das Frame rein. Den Turnigy 9x Receiver hab ich direkt under die FC geklemmt.
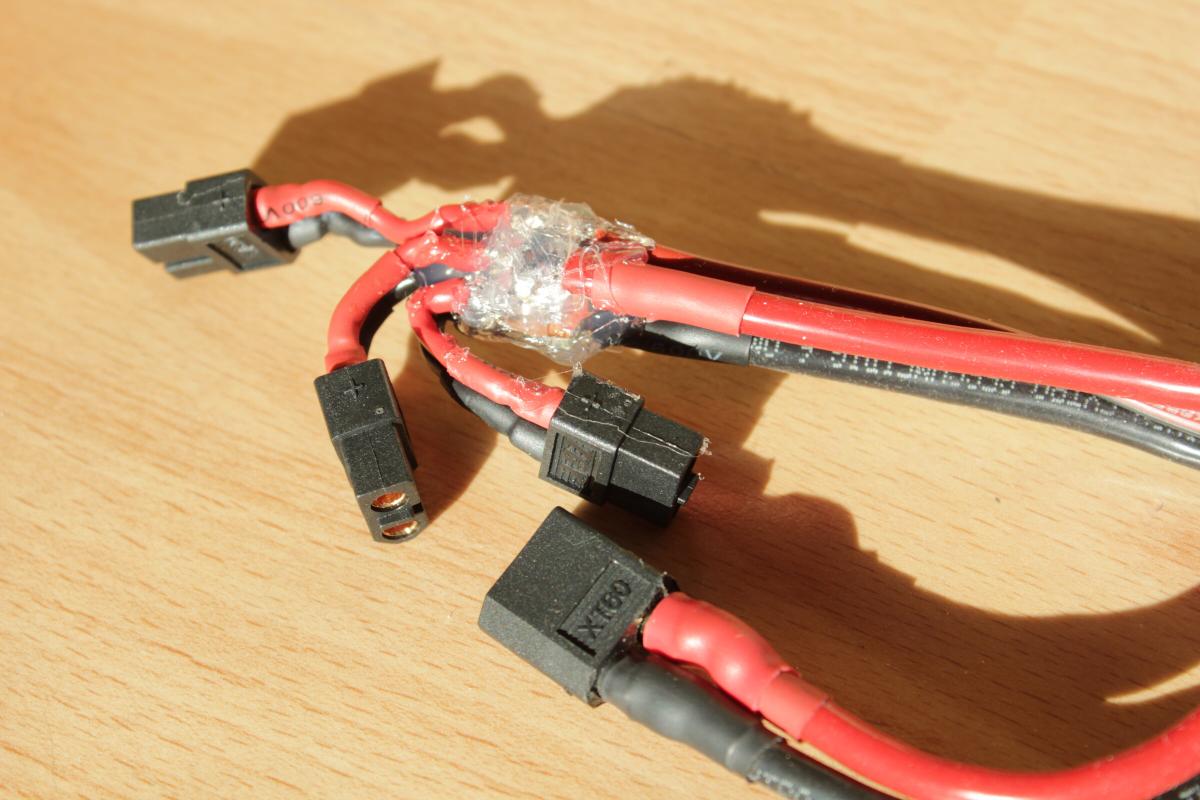
Die ESC werden alle an einen XT60 “Dreifachstecker” gesteckt. Die Kabel sind dabei auf eine doppelseitige Platine gelötet und mit ordentlich Heißklebe gegen Kurzschlüsse geschützt
Damit die ESC nicht rausfallen, sind die Kabel durch die diversen Öffnungen gesteckt.

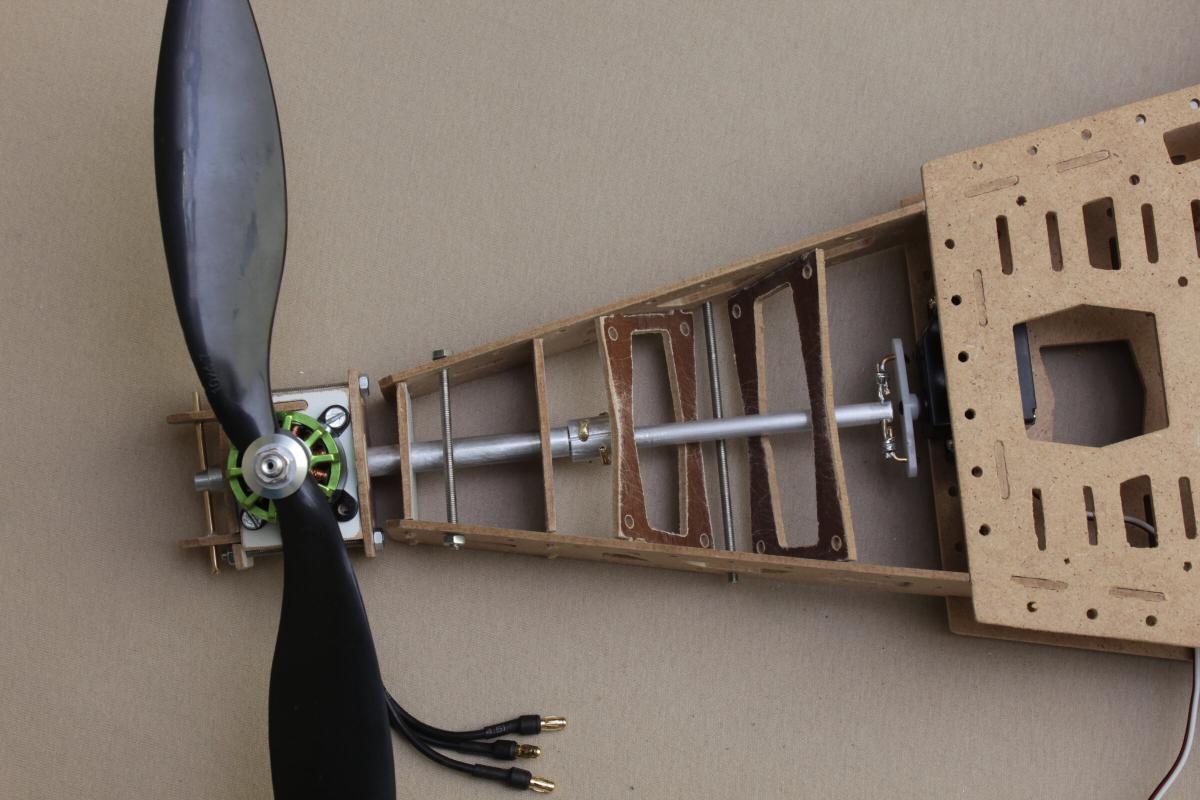
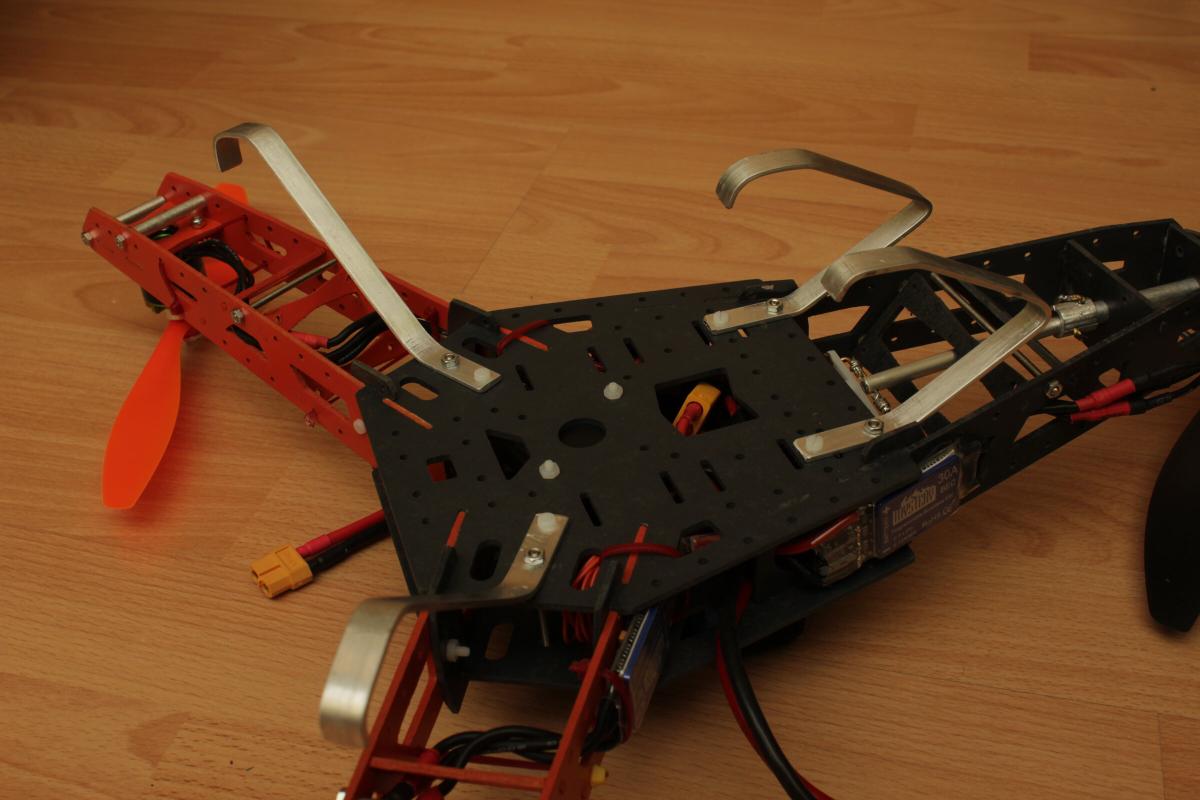
Landefüße
Da der hintere Propeller durch den Servo beim Armen sehr weit ausschwenkt brauchte es unbedingt Landefüße.
Dabei hab ich wieder auf die altbewährten Alustangen zurückgegriffen. Dadurch, dass die Landebeine direkt an der Centerplate angeschraubt sind, werden die empfindlicheren Arme beim härteren Landen geschützt.

Fertigstellung
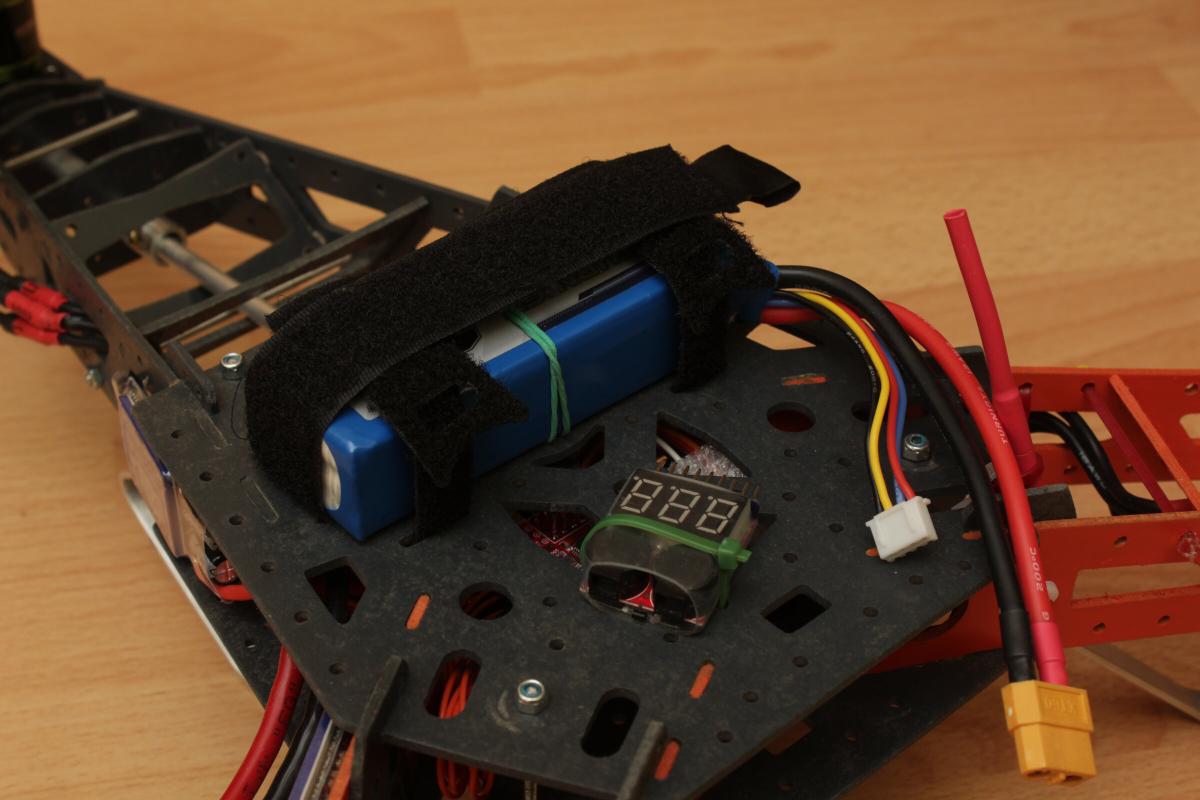
Der 3S 2,2Ah Lipo kommt oben drauf und wird längs und quer mit Klettbändern gesichert.
Hier gibts auch noch nen Video als Zusammenfassung vom Bau und zum Schluss noch ein bisschen Rumgeschwebe.