E-Rollo Steuerung
April 2010
Inhaltsverzeichnis
- Mechanik
- Steuerung
So, dann mal an die Elektronik
Das Ziel ist es, über zwei Kabel (+Masse) dem Rollo zu sagen, ob
es runter oder hoch fahren soll.
Also ~5V auf eines der Kabel und das Rollo fährt dementsprechen hoch oder runter.
Das Problem dabei ist, dass der Motor umgepolt werden muss um sich andersrum zu drehen.
Die Lösung stellen zwei Relais dar.
Hier einmal das Schaltzeichen einer Relais:
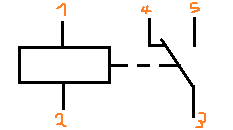
Links ist ein Elektromagnet (Kontakt 1&2), welcher den “Schalter”
rechts umschaltet, sobald er mit Strom versorgt wird.
Also: Ist der Magnet aus, ist Kontakt 3 mit 4 Verbunden.
Ist er an, ist Kontakt 3 mit 5 verbunden.
Nun schließen wir einfach die beiden Kontakte des Motors
an den Kontakt 3 der jeweiligen Relais an.
Die Stromversorgung von ~12V Kommt an Kontakt 4 und 5.
Damit bei nicht aktiver Relais kein Strom am Motor ankommt
wird Masse an Kontakt 4 angeschlossen (bei beiden Relais).
+12V kommt dann an Kontakt 5.
Hier nochmal eine kleine Veranschaulichung:
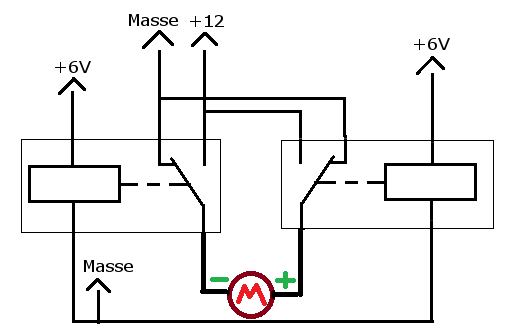
Sobald die rechte Relais schaltet verbindet sich der + Kontakt des Motors mit +12V,
Somit fährt das Rollo z.B. runter.
Schaltet aber die linke Relais wird der - Kontakt des Motors mit +12V verbunden, somit
ist der Motor umgepolt und dreht sich in die andere Richtung.
Das tolle ist auch noch, dass wenn beide Relais geschaltet sind, der Motor beidseitig mit +12V
versorgt wird, was allerdingst so gut wie fast wenig ausmacht.
Damit das auch über einen PC oder einen µC gesteuert werden kann
muss noch eine Schaltung dazu, denn 6V kommen nur schwer aus einem PC oder µC.
Zudem sind die 300mA die so ein E-Magnet zieht zu viel.
Es würde zwar auch schon ein Transistor reichen, jedoch möchte ich
meine PC bzw. einem Atmega8 oder konsorten so etwas nicht zumuten.
Daher verwende ich auch noch einen Optokoppler, welcher den Schaltkreis der Relais vom PC/µC abtrennt.
Da eine Relais beim abschalten etwa 100V Spannung induzieren kann, wird eine Freilaufdiode benötigt. Siehe Wikipedia
Der Optokoppler schaltet also einen Transistor, welcher die Relaisspule mit mindestens 6V versorgt.
Auf der anderen Seite des Optokopplers werden nun ~2V benötigt.
Aus dem LPT Port eines PC oder aus dem Ausgängen eines µC kommen normalerweise etwa 5V.
Mit einem Widerstand kann der Optokoppler nun geschaltet werden.
Diese Optokoppler Transistor-Schaltung muss zwei mal aufgebaut werden (wegen der zwei Relais).
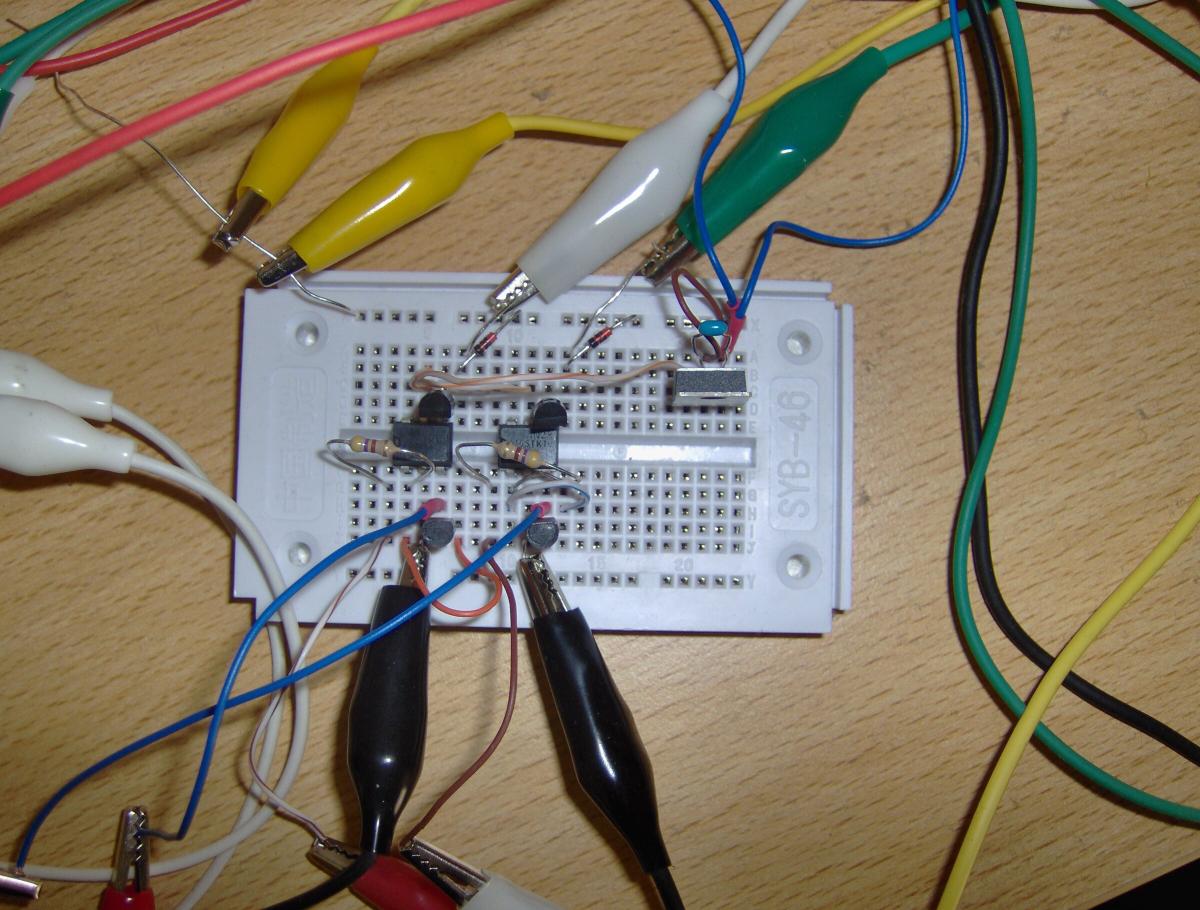
Hier die erste Schaltung
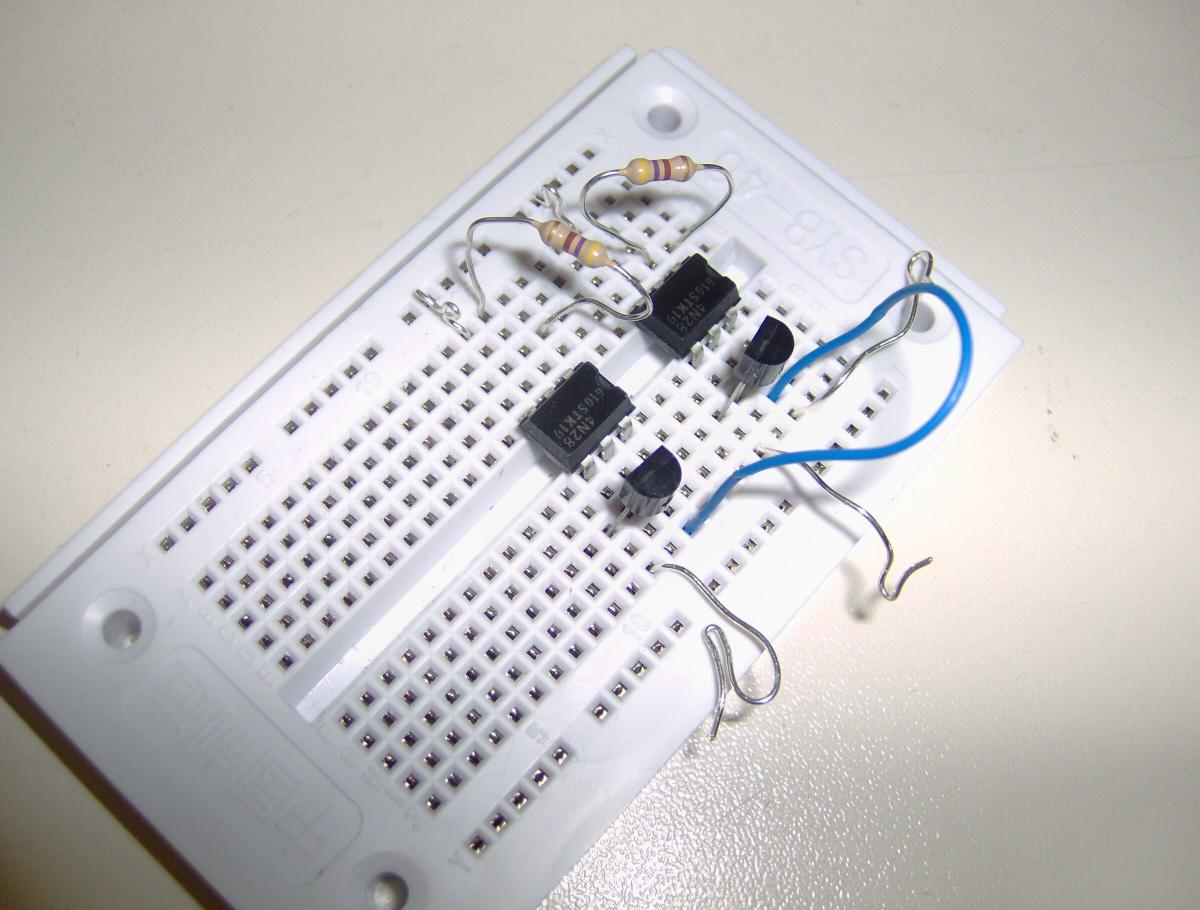
Einen Schaltplan lass ich hier mal einfach weg, sollte eigendlich klar sein.
Hier die etwas erweiterte Schaltung.
Die Freilaufdiode befindet sich jetz auch dort.
Oben rechts steckt ein LM7809 Spannungsregler. Er regelt die 12V auf 9V runter, womit die Relais geschaltet werden.
Jetzt kann das Rollo schon mit einem PC gesteuert werden.
Allerdings weiß der PC dann nicht, ob das Rollo oben oder Unten ist.
Zudem kann es fatal enden, wenn das Rollo zu weit nach oben aufrollt, da es sicht dort einklemmen und reißen kann.
Daher muss es anhalten, sobald es oben ist.
Hierzu wird ein NPN Transistor am Optokoppler angebracht (im obrigen Bild die beiden Unteren).
Das Kollektor und das Emitter Beinchen von Transi werden Parallel zum Optokoppler-eingang verbunden.
Das hat zufolge, dass, sobald das Basis Beinchen des Transistors mit Masse verbunden wird, die LED im Optokoppler nicht mehr leuchtet,
da der Transistor einen geringeren Widerstand als die LED hat.
Jetzt sind wir soweit, dass wir zwei Kontakte haben, die verbunden werden müssen damit das Rollo anhält, wenn es nach oben bzw. am anderen Optokoppler nach unten fährt.
Also schnell überlegen, was man dafür gebrauchen könnte …
Richtig! Nen Reed-Kontakt.
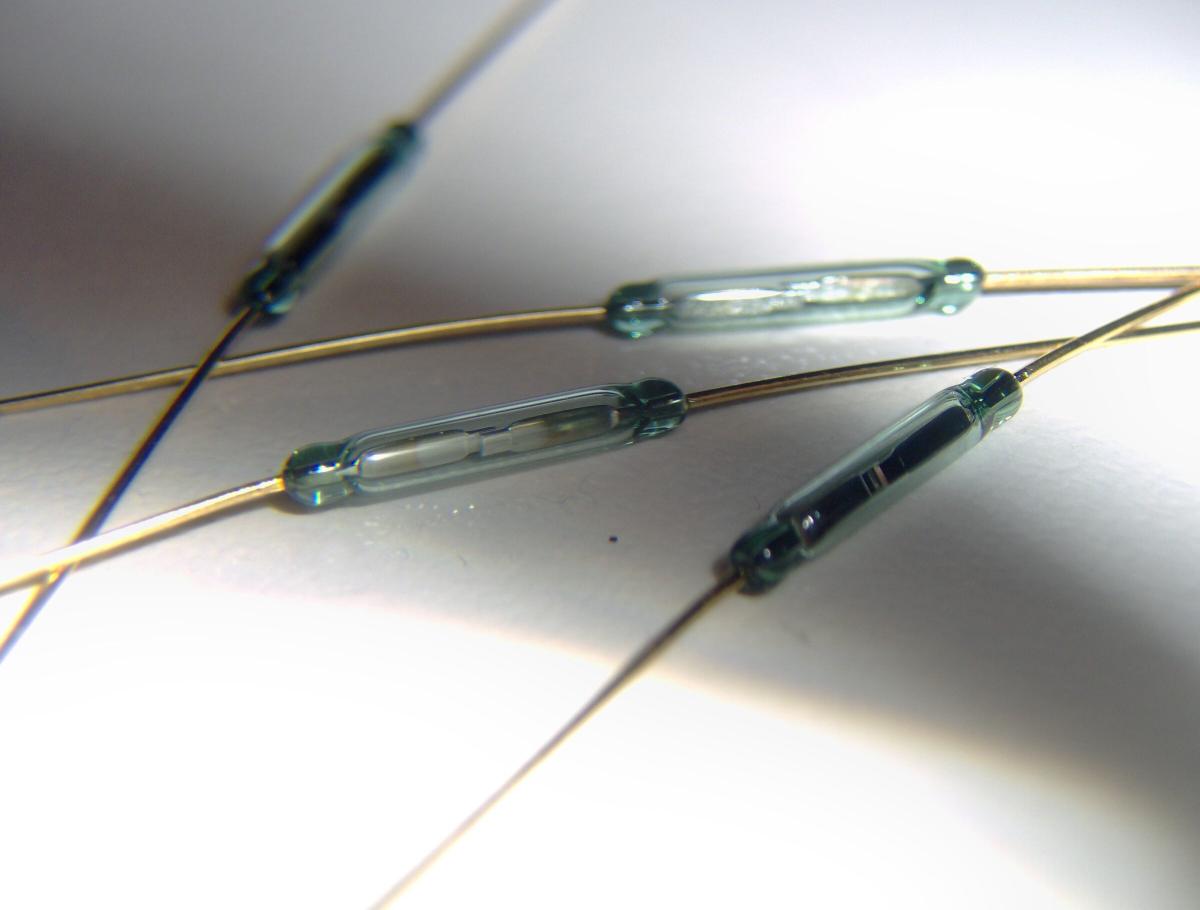
Eben mal ein paar bei Conni für 66ct geholt und oben am Rollo angebracht.
Dann noch am unteren Ende vom Rollo und relativ weit oben am Rollo jeweils ein Dauermagnet befestigt.
Zwei Reed-Kontakte kommen hintereinander in ein Alu-Röhrchen welches oben befestigt wird und nah am Rollo ist.
Die Magnete werden so angebracht, dass wenn das Rollo oben angekommen ist, der untere Magnet einen der Reedkontakte schaltet.
Sobald das Rollo unten ist, schleift der andere Magnet an dem zweiten Reedkontakt vorbei und schließt ihn.
Somit hält das Rollo immer an, sobald es an einem Ende angekommen ist.
Hier die 2 Aluröhrchen für beide Rollos
Durchmesser: 1cm Wandstärke: 1mm Länge: etwa 20cm

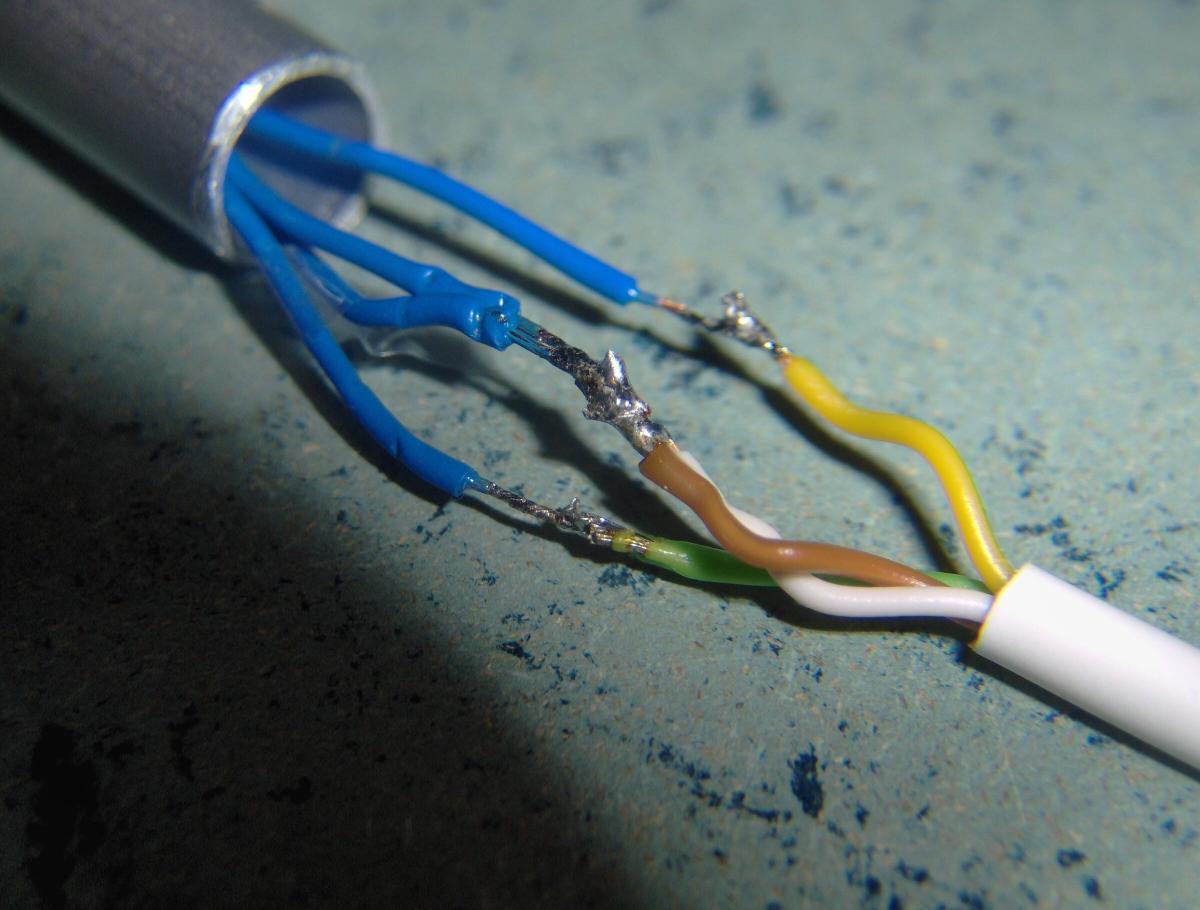
Dann hab ich die Reedkontakte mit Kabeln und Schrumpfschläuchen als Isolierung versehen,
um jeweils zwei Stück auf ein aufgerolltes Stück Papier zu kleben und dann in das Alu-Rohr zu schieben.
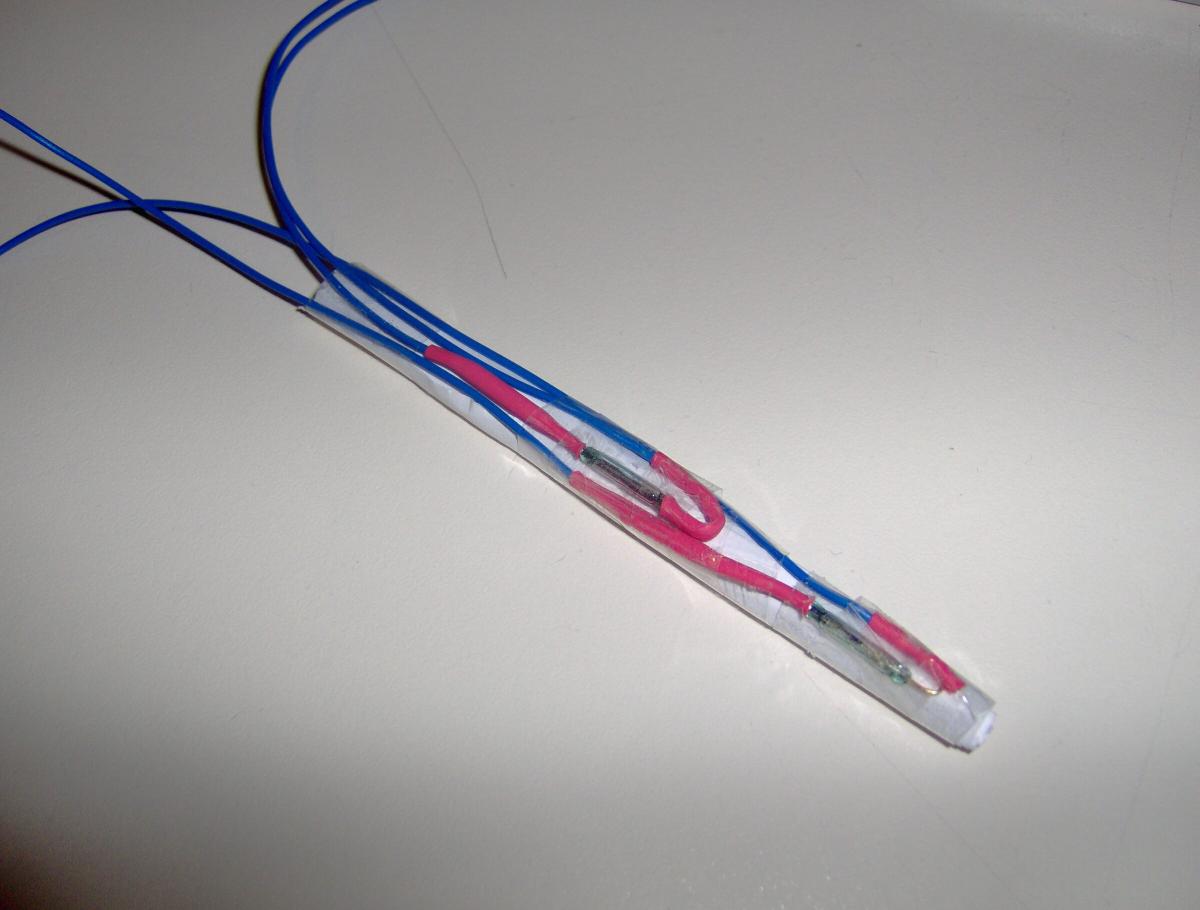
Und hier einmal das fertige Alu-Rohr mit Kontakten drin

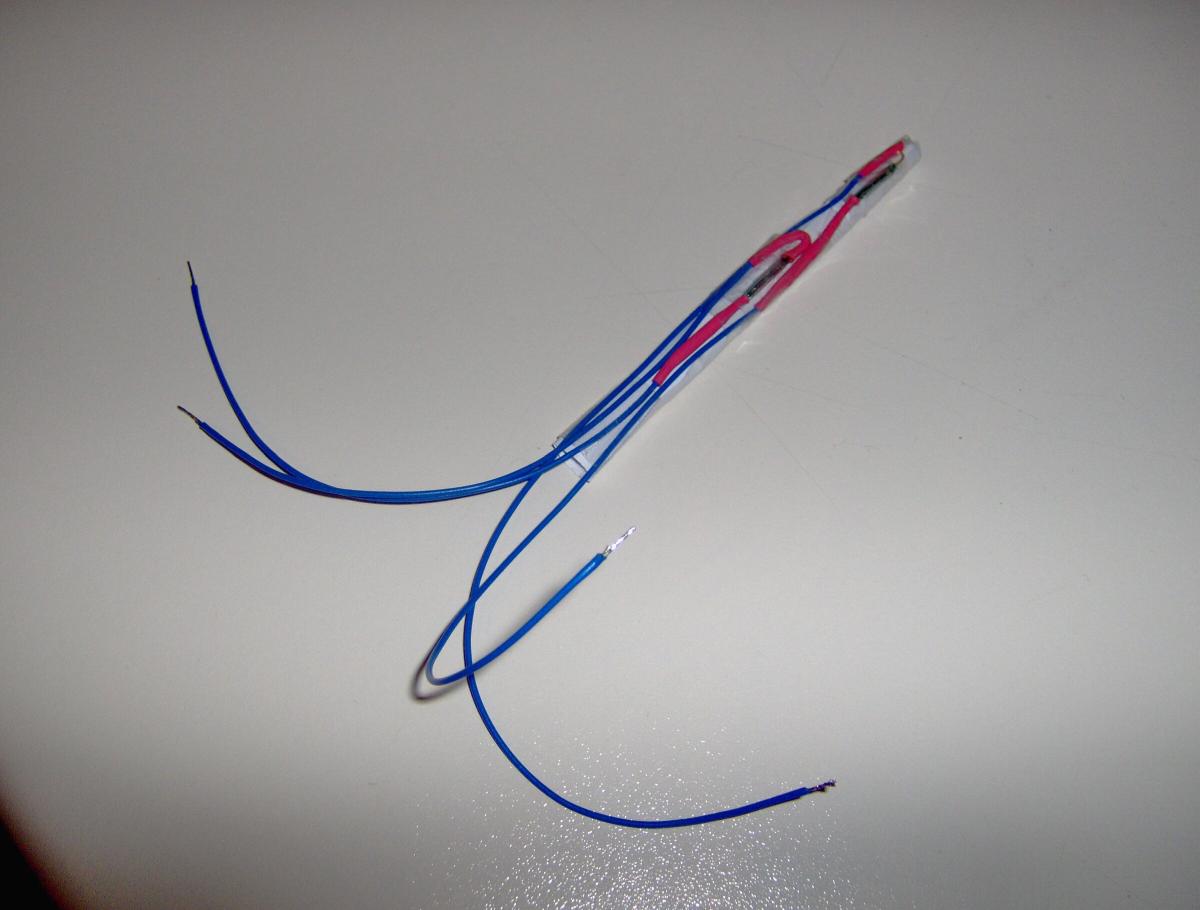
Hier einmal der Blick ins Rohr

Dann noch zwei der vier Kabel zusammengelötet (von jedem Reedkontakt einen) und die dann mit einem Kabel
verlötet, welches zur Schaltung führt (Masse). Die anderen beiden Kabel auch noch ans Kabel und dementsprechend an die Schaltung.
Joa, jetz noch eben mit Tesa an den Motor geklebt.
Und siehe da, es hält an sobald der Magnet kurz vor dem Alu-Rohr ist.
Andersrum gehts natürlich auch
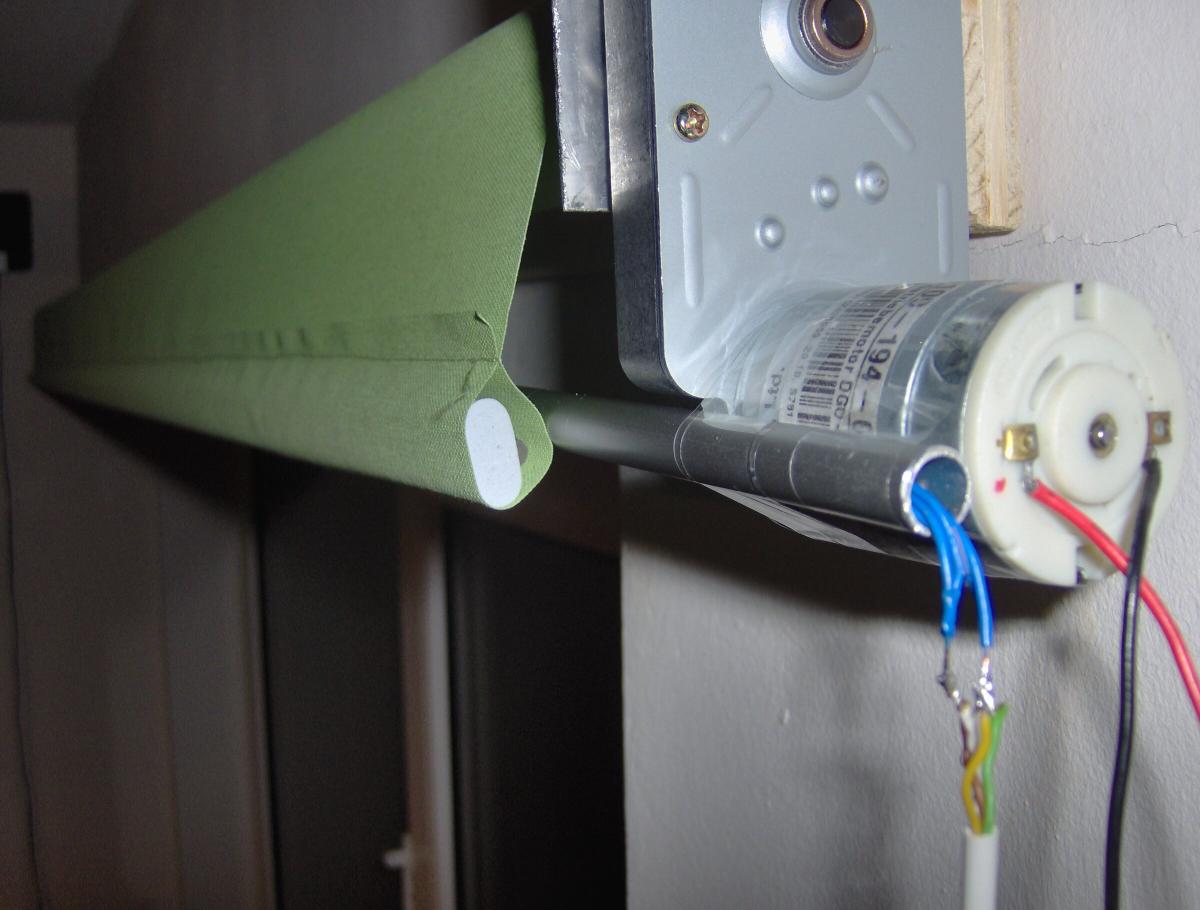
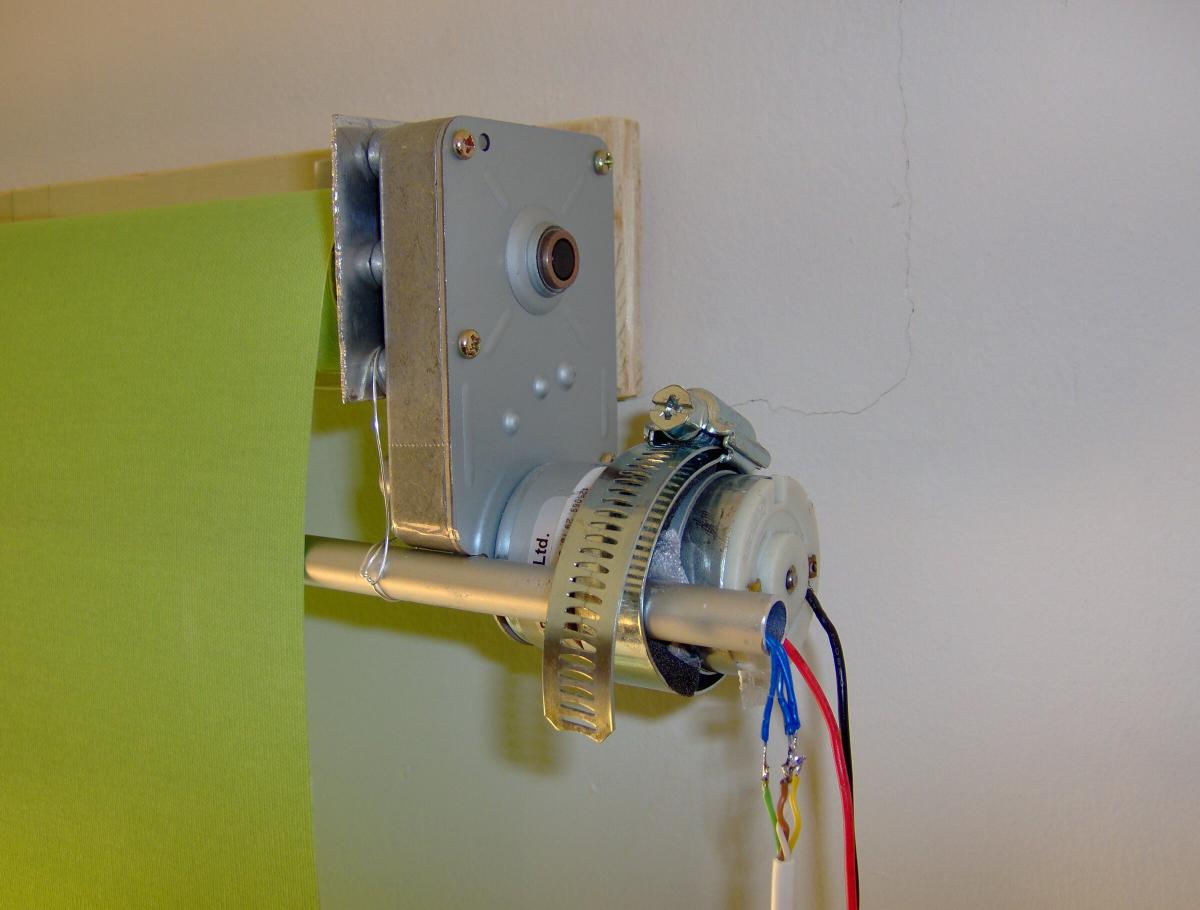
Da das mit dem Tesa sich nicht als Dauerlösung herausstellte
hab ich das Röhrchen mit ner Schelle und etwas Schaumstoff festgemacht.
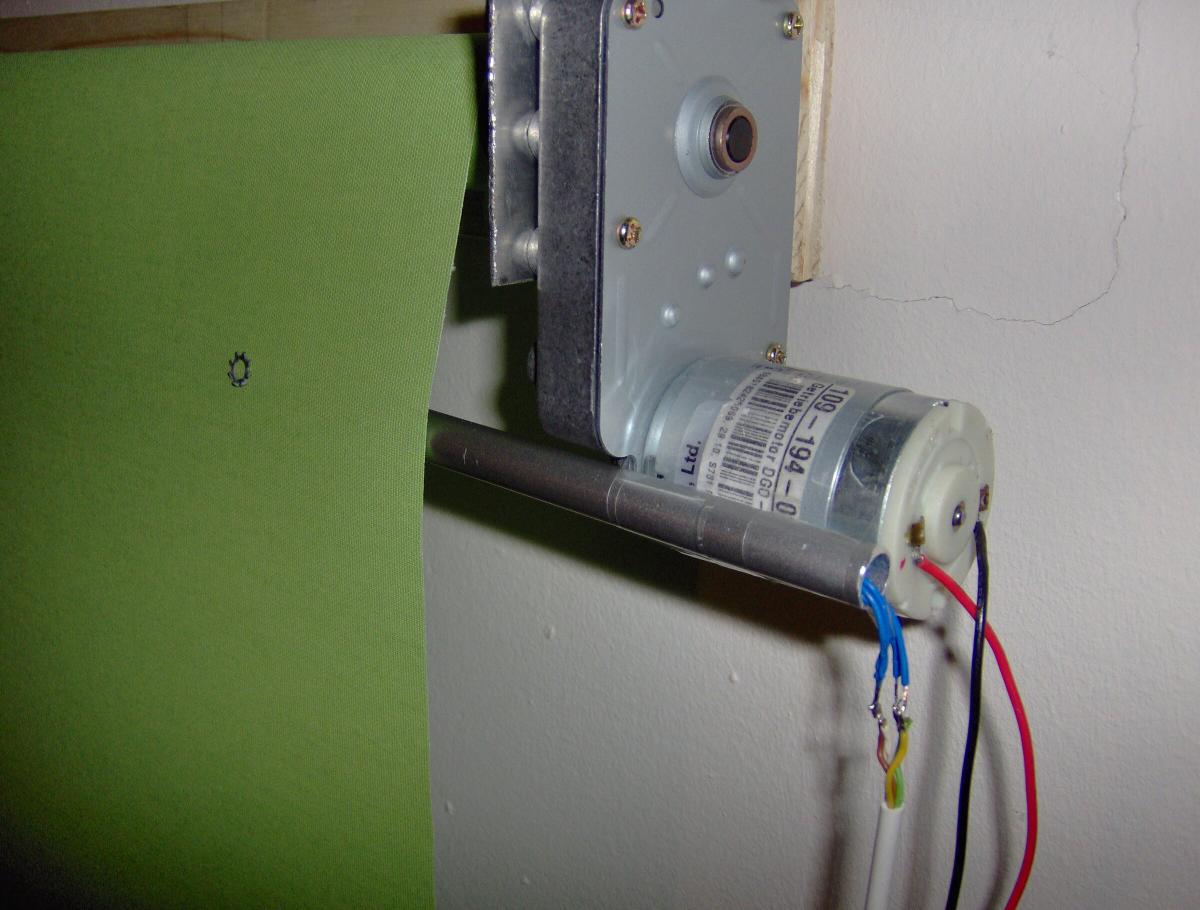
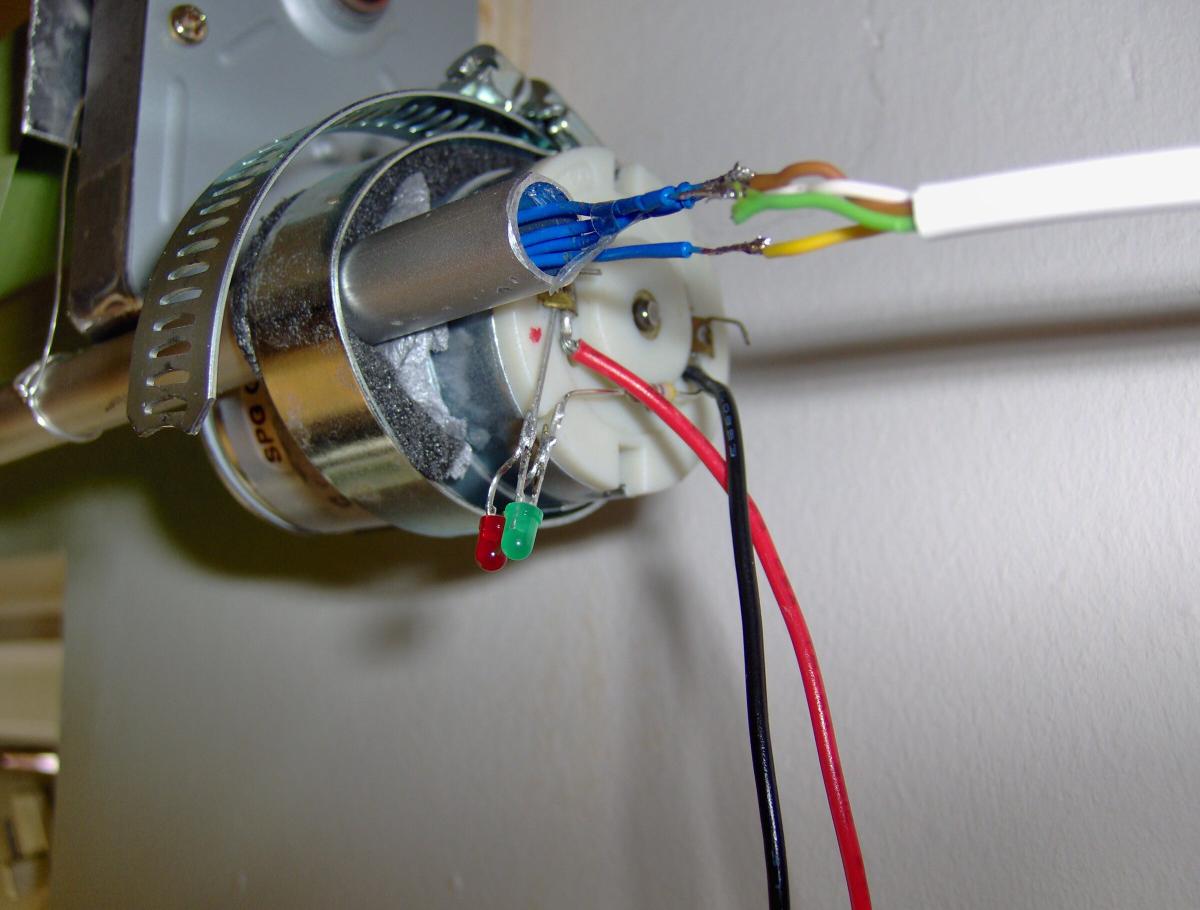
Damit man sieht ob und in welche richtung sich das Rollo bewegt dachte in an
zwei gegenläufig gerichtete LED’s direkt am Motor

Und hier dann an den Motor gesteckt
So das wars auch soweit schon.
Hin und wieder muss ich zwar etwas nachjustieren, aber an sich schon eine Erleichterung.
Das Programm des Atmega’s kann ich bei bedarf auch umschreiben.