Multiplex Easystar 2
März 2014
Inhaltsverzeichnis

Anfang 2014 wurde mir eine gebrauchte Multiplex Easystar 2 überlassen; Danke dafür an Pascal.
Da das Gefährt bereits einen Absturz hinter sich hatte ärgere ich mich nicht so sehr, wenn ich sie mal Erde.
Als Hybridsegler ist der Easystar ein bewähres FPV Modell, mal sehn was sich damit so anstellen lässt.
Verbaut ist ein NTM Propdrive 1000kV an einem 25A ESC. Gedreht wird ein 7" Klappprop.
Desweiteren ein paar 9g Servos. Insgesamt vier Stück: Seiten-,Höhen und 2x Querruder.

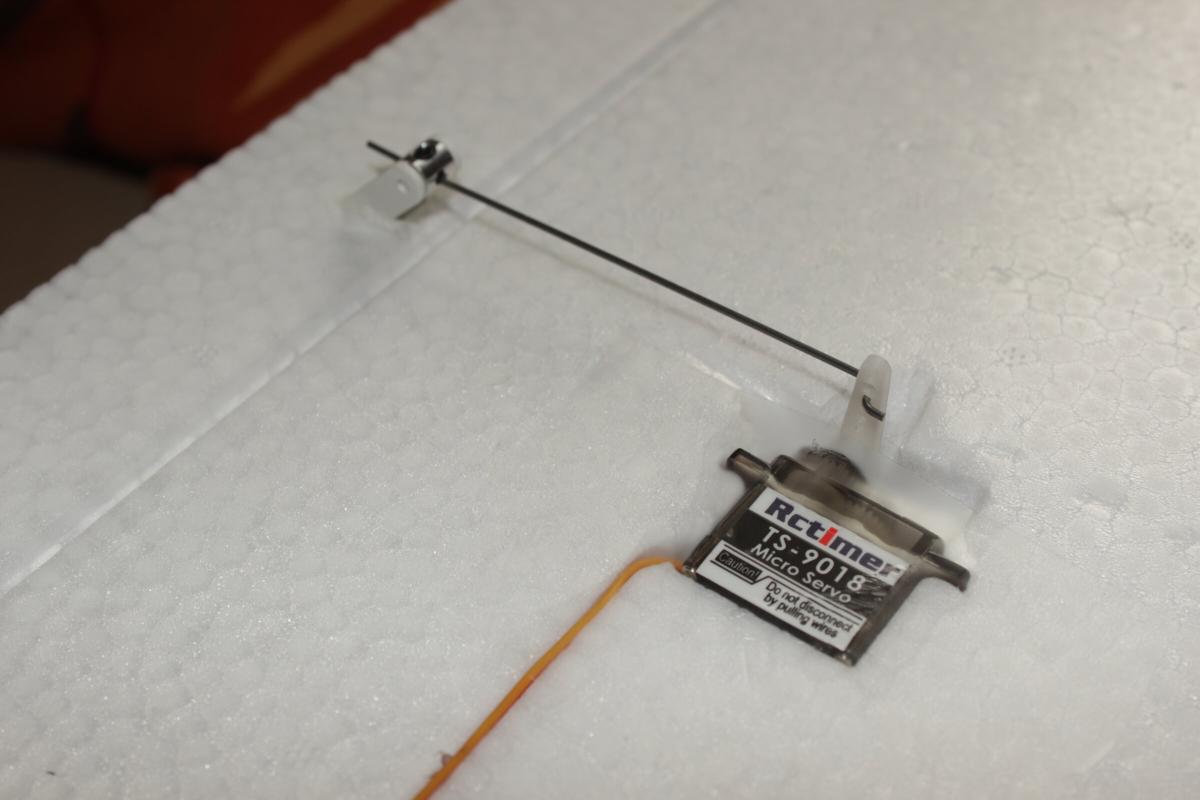
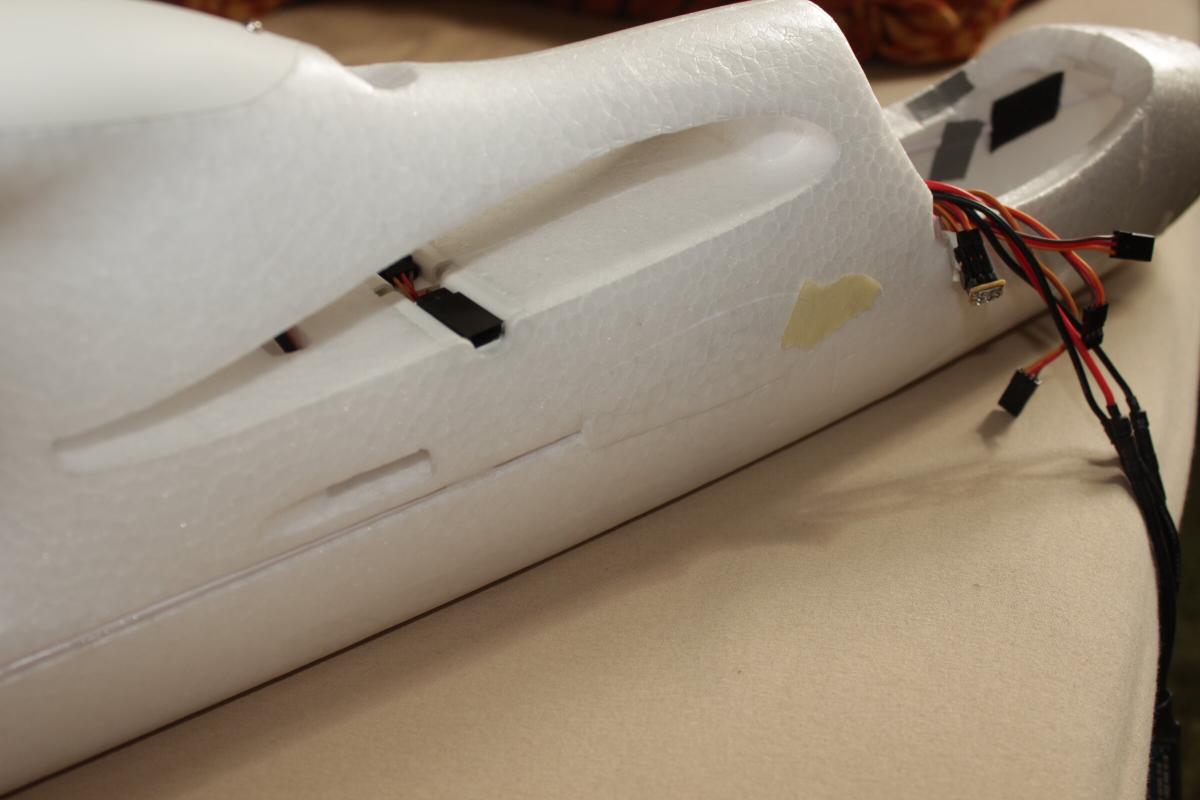
Aufgrund der Spannweite von 140cm ist es sehr Praktisch, dass sich die beiden Tragflächen abnehmen lassen. Die Servostecker werden jeweils in die eingelassenen Buchsen gesteckt.

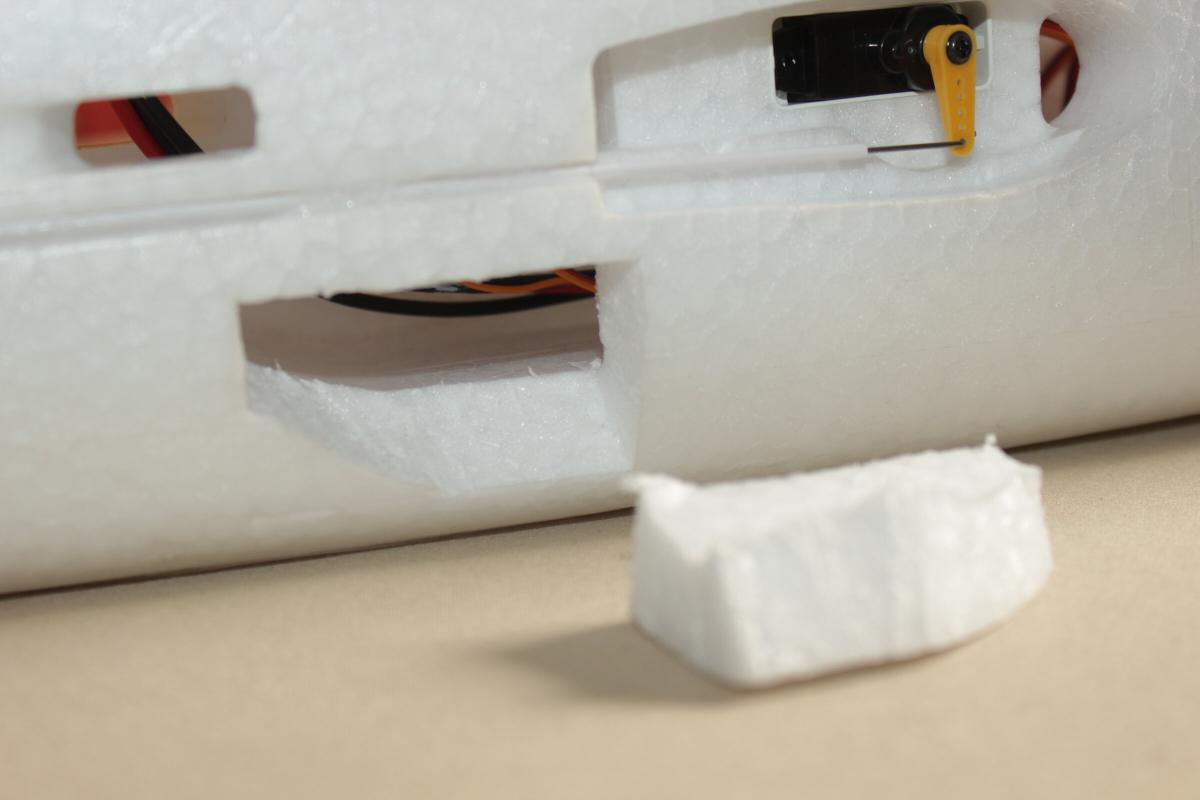
An der rechten Seite musste ich noch eine Öffnung reinschneiden, da ich sonst das ESC nicht vernünftig einbauen kann.
Ob das ESC so tief verbaut noch genügend Luft zur Kühlung bekommt wird sich zeigen. Bis jetzt gab es noch keine Probleme.
Und da ist sie auch schon Flugfertig.
Die ersten Testflüge meinerseits verliefen ohne Absturz. Der Antrieb ist zwar etwas schwach, dennoch aber gut fliegbar.
FPV
Fliegen schön und gut, aber das Spannendste daran ist ja das FPV.
Um eine Kamera anständig anzubringen hab ich eine Ersatzhaube aus Saarpor geschnitzt. Die Klippslaschen sind aus Aluminium-Flachstäben. Loch gebohrt, abgesägt und mit Heißklebe eingeklebt.


Fürs Erste soll die kleine FH18C Kamera mit Tiltservo ausreichen.
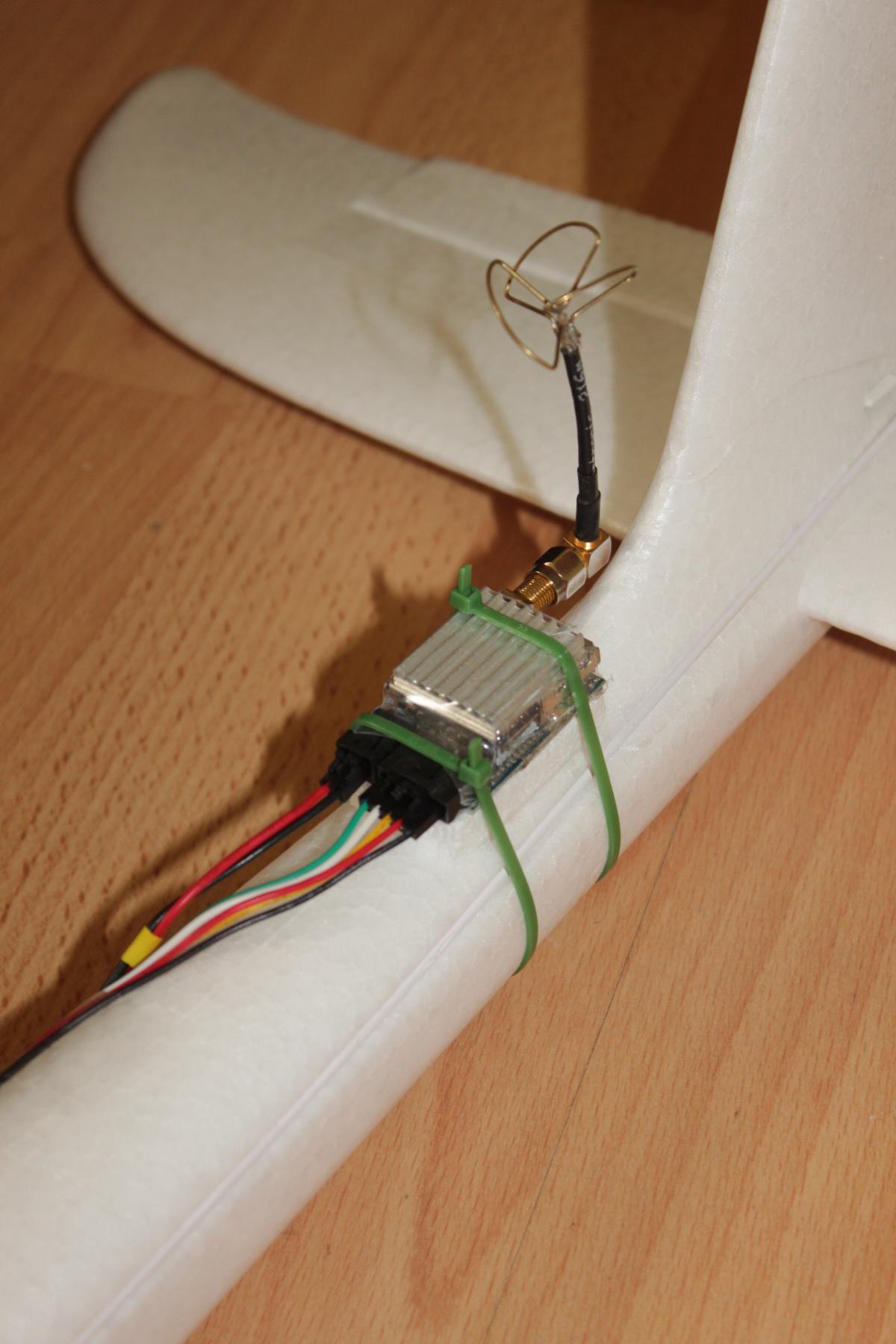
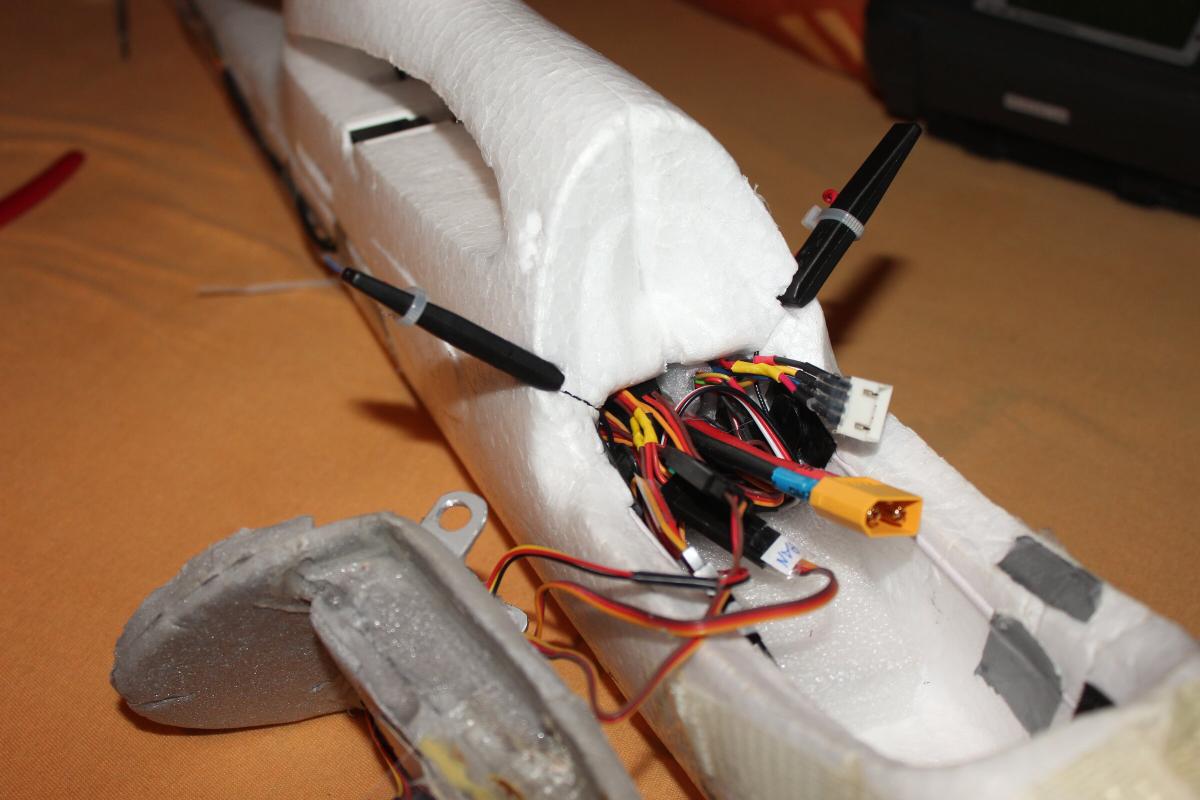
Den Videosender musste ich ganz nach hinten kurz vor dem Seitenruder anbringen, da er vorne zu nah am 2.4Ghz Empfänger gewesen währe. So sind nun 5.8Ghz Sender und 2.4Ghz Reciever so weit wie möglich auseinander, was der Reichweite wohl gut tun sollte.
Die Kabel zum Sender sind an der Seite entlang verlegt und verschwinden irgendwann in der seitlichen Öfnnung.

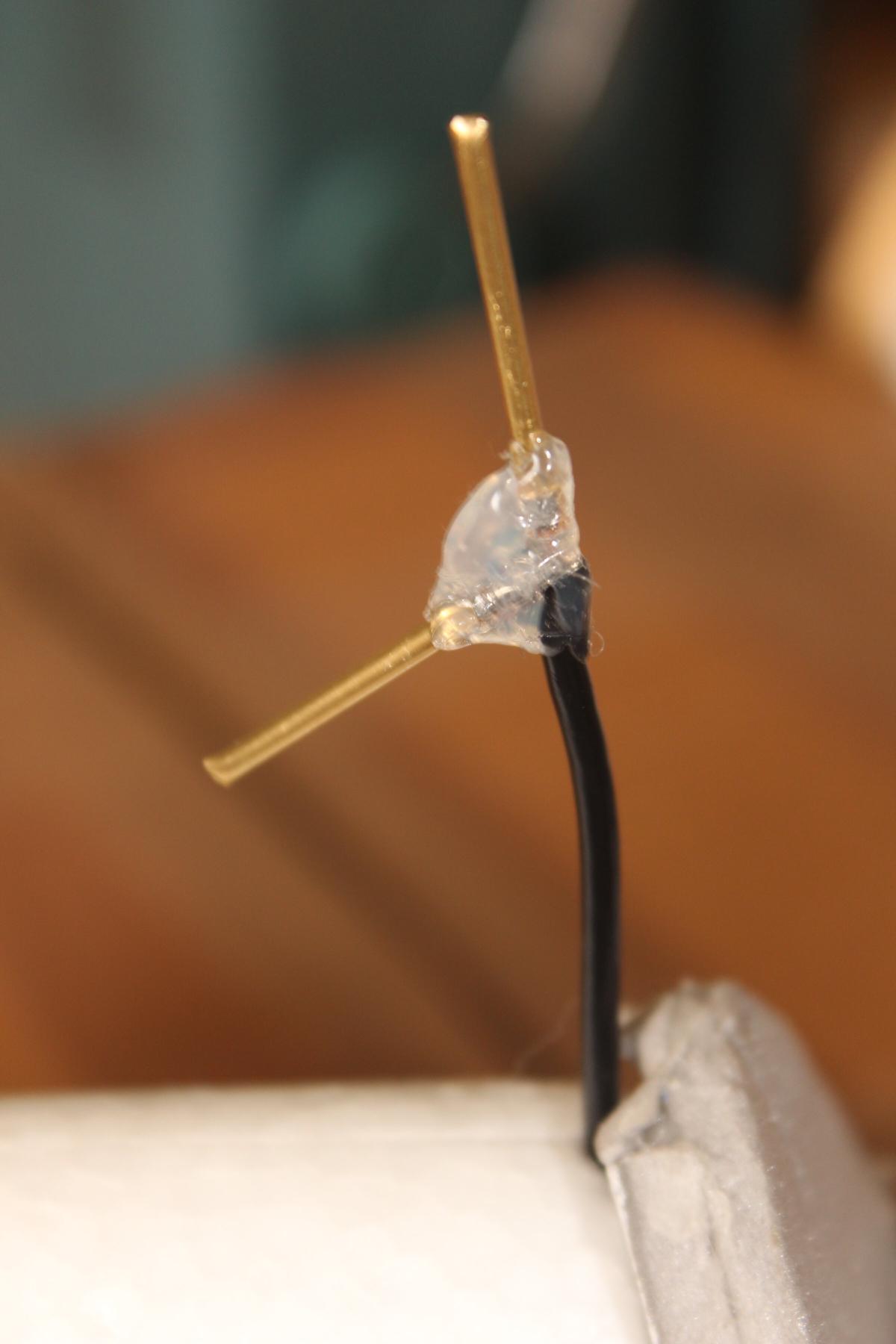
Als Empfänger hatte ich den 9x V2 Receiver aus meinem Tricopter ausgebaut, bei dem ich bereits einen RP-SMA Stecker drangemoddet hab. Als 2.4Ghz Antenne lötete ich dann Spontan eine inverted-Vee (drahtlänge jeweils etwa 29mm), da die ganzen W-Lan Antennen nicht so gut hinter die neue Haube passten.
Innendrin sieht es etwas wüst aus. Die 12V für den Videosender greife ich vom 3S Balanceranschluss, also zwischen Lipo und Lipopiepser, ab. Der 3S 2200mAh Lipo kommt relativ weit vorne in die Nase, sodass der Schwerpunkt in etwa auf Höhe der Verbindungsstange in den Tragflächen liegt.


Nachtrag 13.9.2014: Später hab ich die Antenne nochmal neu gebaut. Diesmal mit 2mm Messingrohr, die Adern aus dem Koaxkabel passen wunderbar in die Rohre rein und sind dort auch verlötet.
Testflug auf Sicht mit Aufzeichnung des Videosignals hab ich an einem wohl etwas zu windigen Tag gemacht (13.4.2014). Eine Böe hat ihn dann in Bodennähe auf selbigen gedrückt. Der Schaden war dennoch überschaubar, ein bisschen Sekundenkleber und Tape und es sieht wieder wie vorher aus.
Die ersten FPV Flüge verliefen soweit gut. Der Easystar ist super einfach zu fliegen, gerade beim FPV eine super entspannte Sache.
Besonders interessant finde ich es, im Flug die Aussicht zu genießen. Dazu ist ein Pan-Tilt ideal. Eine Mobius mit der FPV-Kamera hab ich drehbar auf der Haube des ES montiert. Mit einem Headtracker an der Brille soll es dann möglich sein, sich im Flug umzuschauen.
Nachtrag: Nach ein paar Landungen im etwas Höheren Gras/Gestrüpp hat es mich dann den Pan Servo gekostet. Die Grashalme bleiben an den Kanten des drehbaren Teils hängen und reißen selbigen zur Seite weg wodurch die Zähne der Plastikzahnräder in den günstigen 9g Servos abbrechen. Nur auf glatten Boden zu Landen ist nicht immer möglich, mal sehn was ich da machen werde.


13.9.2014: Endlich kam der neue Motor von Hobbyking an. Der 1200Kv Propdrive 28-26 soll den 1000Kv Propdrive 28-26s ersetzen.
Damit fliegt es sich schonmal deutlich besser. Immernoch keine Rakete aber immerhin geht er etwas steiler nach oben.

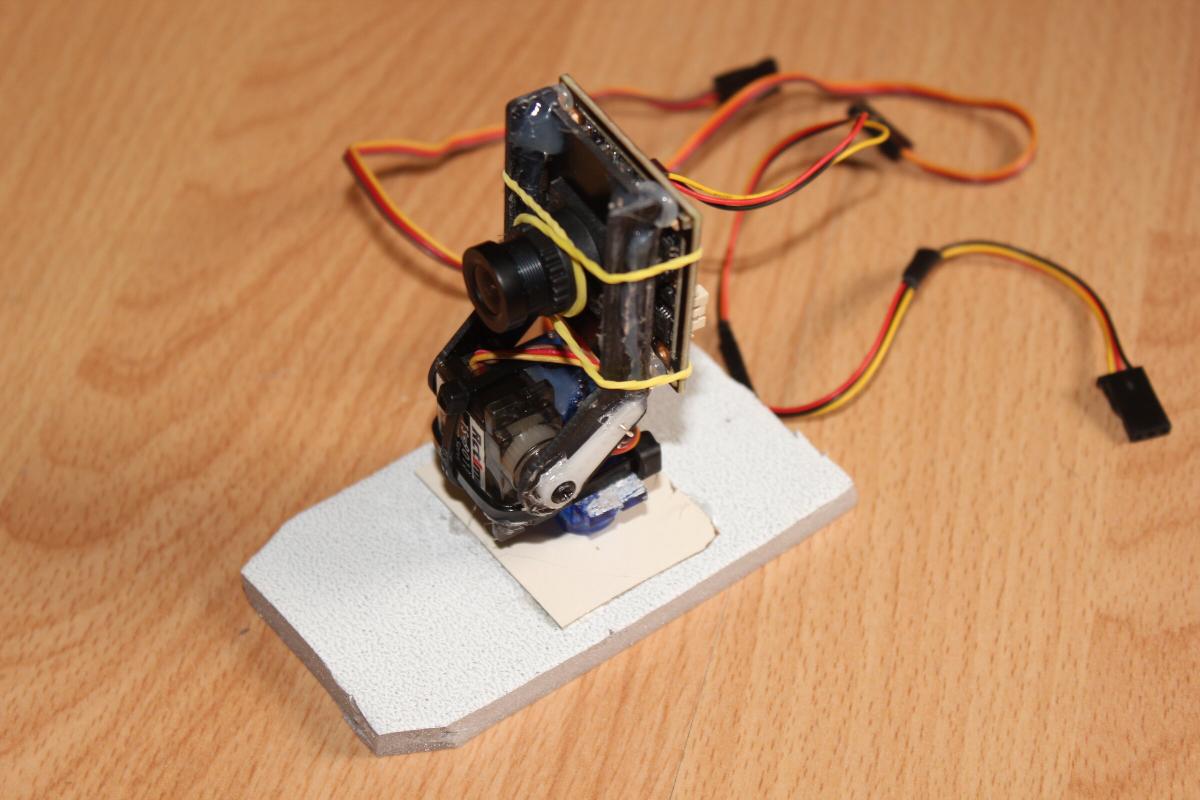
1.10.2014: Nachdem die Teile für den DIY Headtracker ankamen wurde es Zeit für ein neues Pan Tilt, diesmal passend für die Sony Super HAD II Platinenkamera.
Zuerst wollte ich etwas Richtung des Hobbyking Pan-Tilt bauen, habe dann aber meine bestehende Tilt Vorrichtung beibehalten (bzw. angepasst für die Sony) und direkt an den Tilt-Servo den Pan-Servo geklebt. Der Servo für das seitliche Umgucken (Pan) ist ein HXT 900, welchen ich mit zwei 2,2k Widerständen auf knapp 180° gepimpt habe.
Ein kleines Visier vor dem Pan-Tilt soll lange Grashalme beim Landen daran hindern, sich um die Servos zu wickeln und diese abzubrechen.

Hier noch einen kleinen Zusammenschnitt in dem man das Pan/Tilt bei der Arbeit sieht. Gesteuert wird es über den Headtracker.
Stromsensor und Videoswitch
Neben der Akkuspannung ist es manchmal doch interessant, den aktuellen Stromverbrauch und den verbrauchten Strom zu kennen.
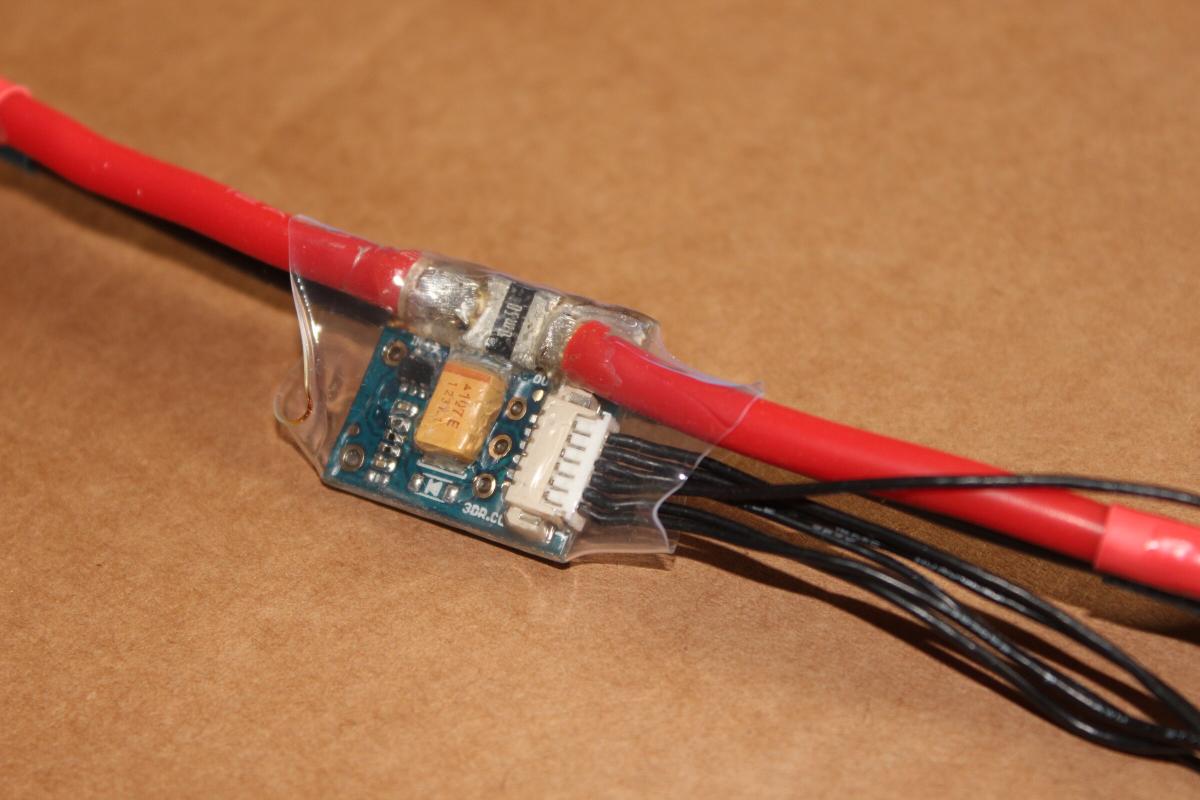
Dazu ist es nötig, einen Shunt zwischen Akku und dem Rest einzubauen. Ein Shunt ist ein Widerstand, meist <1 Ohm, über welchen je nach fließendem Strom eine gewisse Spannung abfällt. Nach dem Ohmschen Gesetz ist der Spannungsabfall umso größer, je mehr Strom fließ. Misst man also die Spannung über den Shunt und multipliziert den Wert etwas hoch, erhällt man den Strom.
Praktischerweise gibt es da schon kleine fertige Platinen mit besagten Shunt und einem Pegelkonverter drauf zu kaufen. Meins hab ich von readytoflyquads.
Im Code vom Minim hab ich die Stromanzeige wieder einkommentiert und die passenden Werte über die GUI anschließende eingestellt.
Dieses Power Modul gibt die Spannung und den Strom in Spannungen von 0-5V aus, es wird also kein zusätzlicher Spannungteiler vor den Eingängen des Atmegas auf dem Minim benötigt.
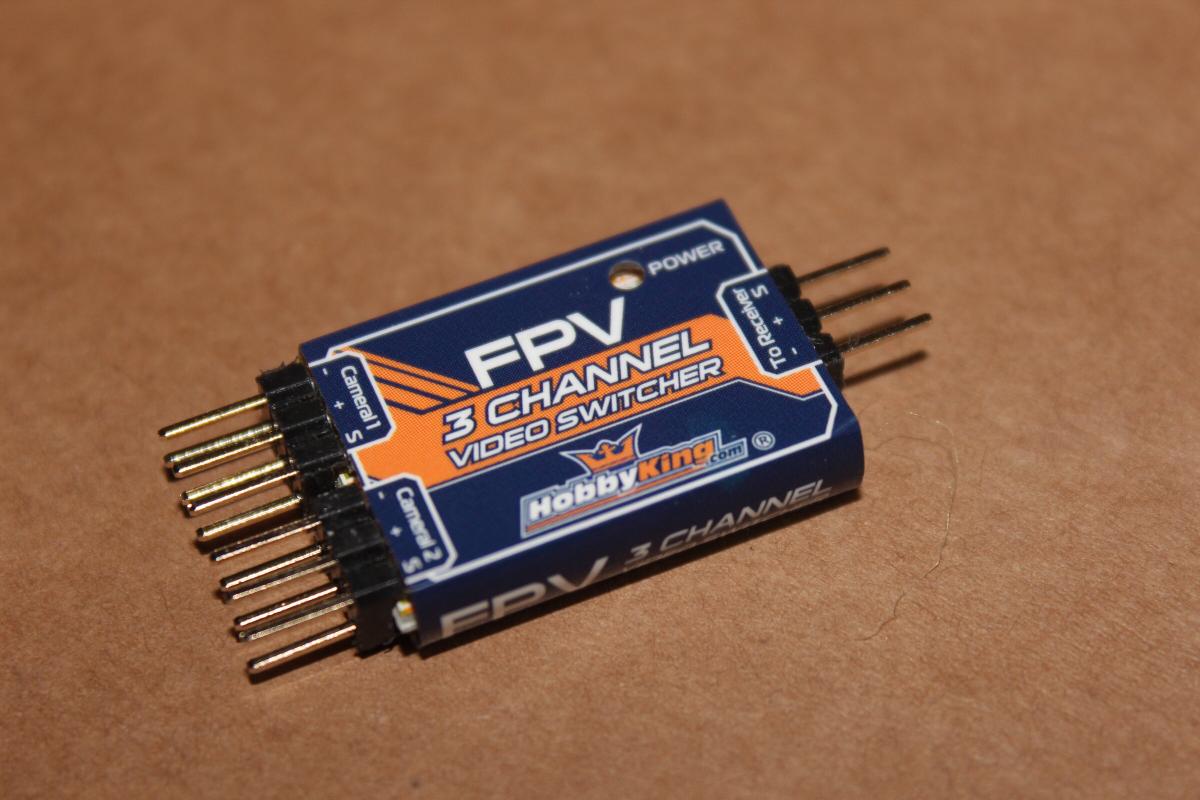
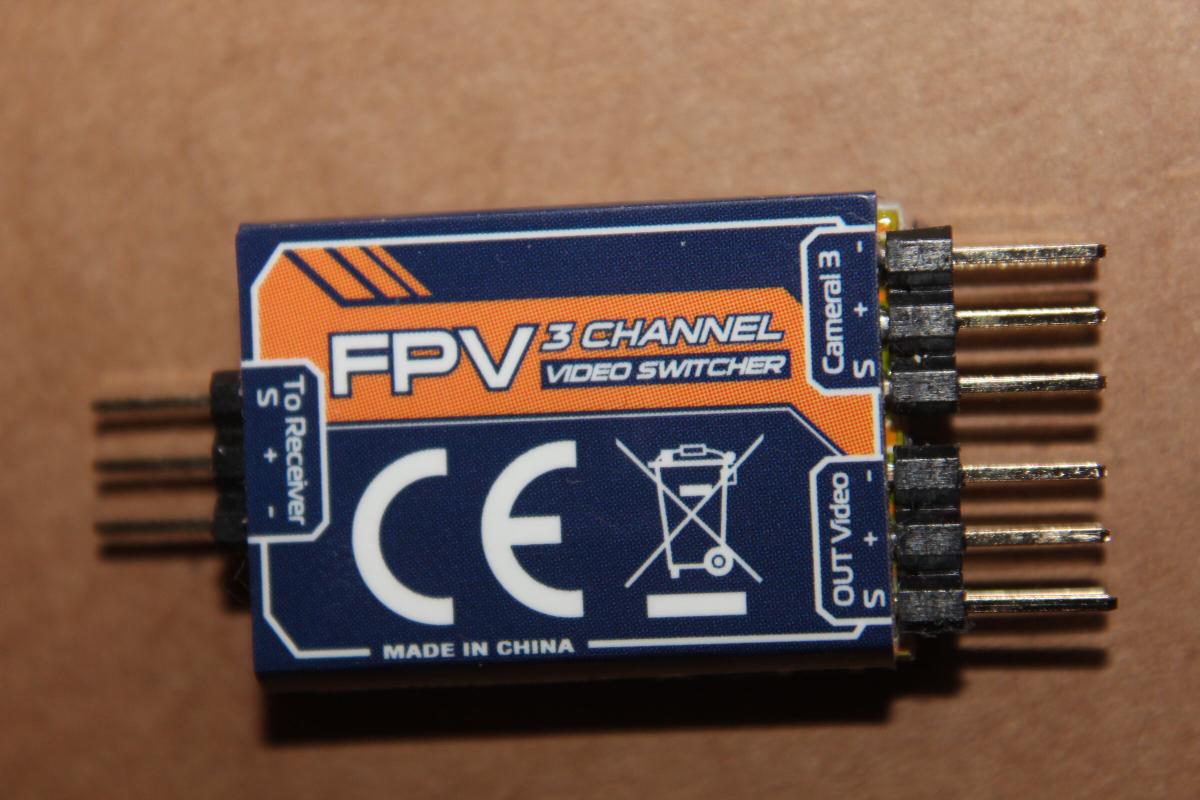
Für günstig Geld gibt es bei HK solch einen Videoswitcher. Ich hab so einen gleich mal mit eingebaut, um von FPV cam zur Mobius umzuschalten.
An einer seite wird das Switcher dann mit dem Empfänger verbunden und schaltet die entsprechende Kamera innerhalb von drei Bereichen im Eingangssignal.
Die Mobius gibt ihr Livevideo über den Mini-USB Anschluss aus und wird dort gleich mit den onboard 5V versorgt, damit sie nicht auf den internen Akku angewiesen ist, der da nur knapp eine Stunde hällt.

Nun wirds echt eng in dem kleinen Flieger. Gerade so passt alles noch in den Hohlraum.

Im Bild nun neben Groundstation Diversity RSSI Werten, RC RSSI, Zeit und Spannung auch der Strom und der bereits verbrauchte Strom in mAh, hier 155mAh.

Crash
Alles was hoch fliegt, kommt auch irgendwann mal runter. In diesem Fall sogar recht senkrecht. Nur die Nase inklusive FPV-Haube haben stark gelitten.
Ursache war wohl eine lose 5V Verbindung, welche zu einigen FPV-Blackouts führte und letztendlich warscheinlich zum Ausfall des FrSky Receivers. Danach gings dann aus Baumhöhe nach unten.

Irgendwie war ich zuletzt nicht mehr ganz so zufrieden mit dem Flugverhalten. Alles sehr träge und etwas schwach. Ich denke das war vorerst das Ende für den Easystar II als große FPV Platform.
Und Ja, Groundstation und Mobius haben aufgezeichnet: