CrazyCart Rahmen, Licht, Display und Räder
Dezember 2015
Inhaltsverzeichnis
- CrazyCart
- Pedale, Controller und Motor
- VESC
- Rahmen, Licht, Display und Räder
Nachdem ich nun etwas längere Fahrten mit dem Cart gemacht habe wurde mir bewusst, dass es auf Dauer doch etwas schmerzhaft ist mit stark angewinkelten Beinen zu fahren.
Somit entschied ich mich dazu, die Front zu verlängern. (Linkes Bild: vor der Modifikation)


Vorne hab ich also alle vier Stahlprofile am Rahmen auf Höhe der Pedale durchtrennt und vier 10cm lange Stahlprofile eingesetzt. Mit einem leichten Winkel bei den verlängerungsstücken ist die Front nun etwas nach oben geneigt. Zudem wurden beide Pedal um etwa 2cm nach vorne “verschoben”.
Den Mechanismus am Bremsschalter musste ich ebenfalls überdenken. Nun wird er über eine Feder direkt von der Unterseite des Pedals betätigt. (Mal sehn ob das so bleiben wird)


Da das Cart nun länger ist mussten die Aluminiumbleche ebenfalls erneuert werden. Um in Zukunft das Klappern zu verhindern hab ich kurze Schaumstoffstücke zwischen Blech und Stahl geklebt.


Und dann brach mir der Gabelschaft von der Radkabel wech. An der Schweißnaht lags nicht, ein Teil des Schafts war noch an der Gabel, eher vermute ich, dass durch das Runterdrehen des Durchmessers für den Steuersatz das Material zu dünn wurde.


Die Reste hab ich dann weggeschliffen und ein Stück Stahl draufgeschweißt, welches im Gabelschaft klemmen wird. Danach dann das Rohr wieder draufgekloppt und mit der seither gewonnenen Schweißerfahrung wieder befestigt.


Mittlerweile ist es Ende Dezember 2015, und die Sonne geht einfach zu früh unter. Was also fehlt ist Licht.
Die zwei Bügel an der Front eignen sich so schon sehr gut, um auf beiden seiten eine Lampe als Fronscheinwerfer anzubringen.

Dazu nahm ich den Kopf samt Linse einer günstigen Taschenlampe und drehte aus Almulnillium das neue Gegenstück.


In der Mitte des Zylindrischen Teils wird ein Gummiring eingelassen. Dadurch lässt sich die Linse wie bei dem Vorbild vor und zurück schieben.
Durch das Loch auf der Stirnseite werden die Kabel der LED nach hinten herausgeführt. Das 6mm Loch an der Seite dient zur Befestigung am Cartrahmen.


Die SMD LED OSRAM DURIS S8 GW P9LMS1.EM von Pollin ist mit 419 lm gerade passend und vorallem super günstig. Auf eine Ausgefräste Kupferplatine wird diese Aufgelötet um Anode und Kathode an ein Lautsprecherkabel anzulöten. Mithilfe von Wärmeleitpaste wird die Platine thermisch mit dem Almulnilliumblock verbunden.



Das ganze zweimal und fertig sind die Frontscheinwerfer. Bei knapp 4W, die jeweils eine LED verbraucht wird der Aluminiumblock ohne aktive Kühlung etwa 40°C warm. Direkt an der LED sind es bis zu 70°C oder 80°C.


Mit einem Holzblock und zwei Moosgummistücken werden die Lampen auf der Innenseite des Rahmens angeschraubt.
Die LED’s sind für einen Dauerstrom von 0,2A spezifiziert welcher bei ca. 20V fliesst. Dazu hab ich mir ausreichend DCDC LM2596 Step-down wandler mit Strombegrenzung bestellt.
Der LM2596 sowie der Eingangskondensator des Stepdown sind aber nur bis max. 36V Eingangsspannung verwendbar. Da ich keinen Konstantstrom Stepdown mit bis zu 50V gefunden hab, musste ich zusätzlich noch einen Stepdown mit LM2596HVS bestellen, welcher dann zuerst von 50V (=12S Lipo) auf z.B. 24V für die LED Stepdown Treiber runterregelt.
Um den Aufbau direkt testen zu können hab ich die Stepdowns eingeschrumpft und erstmal irgendwo am Rahmen festgemacht.



Die Lampen sind vorne mit jeweils einem XT30 Stecker versehen, so lassen sie sich nachher einfacher ausbauen.
Die ganze Beleuchtung ist wie bereits irgendwo zuvor beschrieben mit einer 3A Autosicherung an 50V abgesichert.

Ok, Frontscheinwerfer sind nun am Start. Was fehlt da noch an ultimativen Tuning? Genaaaauuu, Unterbodenbeleuchtung.
Eigentlich sollten es nur zwei Streifen einfarbige LED’s werden, ich konnte mich aber einfach nicht für eine Farbe entscheiden, also hab ich alle genommen. Die WS2812 LED’s hab ich in Wasserdichter Silikonschlauch Ausführung bei Banggood glaub ich für etwa 30€ die 5 Meter Rolle gekauft. Ausreichend sind aber 2 Meter.
Die 60 LED’s pro Meter haben jeweils einen eigenen Controller, welcher es erlaubt, jede einzelne RGB LED auf dem Streifen einzelnd zu steuern. Damit sollte sich die ein oder andere Effektanimation einstellen lassen.


Vom Pedal bis hin zum Sitz kamen Aluminiumwinkelprofile in den Rahmen, gerade so, dass sie beim Aufsetzen die LED’s vor dem harten Boden schützen.
Vorne rechts bekommt der Anfang des Streifens die Daten, sowie 5V Spannung von einem Stepdown Regler. Als Rücklicht ist ebenfalls der Streifen an der unter dem Sitz befindlichen Querstrebe nach hinten zeigend angebracht.



Ein 63x150x36,5 Aluminiumgehäuse soll die beiden Spannungsregler (24V für die CC/CV Stepdowns der Frontscheinwerfer und 5V), sowie einen Controller und weitere Elektronik beinhalten. Ein Plastikeinsatz mit etwas Schaumstoff drauf soll die Elektronik vor Kurzschlüssen schützen.




Und wenn da jetzt schon ein Controller zur Steuerung der Beleuchtung rein kommt, können auch gleich die Frontscheinwerfer mit gesteuert werden. Dazu schnell einen Mosfet mit Transistor hinter den 24V Stepdown.


Kurz ein simples Programm auf den Arduino Nano flashen und es strahlt in all seiner Pracht.
Was ich ganz vergaß zu erwähnen: Der Arduino ist per (software) Serial mit dem VESC verbunden und kann so durch die ERPM die Fahrgeschwindigkeit ausrechnen und Lichteffekte davon abhängig machen.


Jetzt ist der Arduino füdie Lichtsteuerung schon mit dem VESC verbunden und kann alle möglichen Daten auslesen, da währ es ja schade drum, diese nicht auch noch anzuzeigen.
Mit 5 € kostet so ein 2,2" Farb LCD mit SPI ja auch fast nix, also dran damit!


Das Gehäuse kam aus dem 3D-Drucker und das Kabel mit den bunten Strippen von einem Netzwerkkabel, an dessen Ende ich zwei Stecker angebracht habe um das Display später abnehmen zu können.
Es war nötig, das Display etwas anzuwinkeln aus welchem Grund ich auch ein Winkelstück gedruckt und auf die Rückseite geklebt hab. Es dient zudem als Kabelführung.
STL Files: crazycart_display_case.stl, crazycart_display_caseholder.stl




Noch ein bisschen mehr Testcode, so langsam füllen sich die 32k Bytes.
Die Arduino Library ist eine modifizierte Version der VescUartControl library by RollingGecko. Zu beziehen unter: github.com/derlucas/VescUartControl

Hinzu kam noch ein 5V->3.3V Levelshifter in Form eines 74HC4050 für das Display und die Verbindung zum VESC, da beide auf 3.3V Level arbeiten. Das VESC währe im Gegensatz zum ILI9341 LCD Controller ausreichend 5V tolerant, aber es war ja eh noch ein Eingang am 4050 frei.


Nachdem alles wieder ins Gehäuse gequetscht war, wurde es Zeit die GUI zu programmieren.


Um zumindest die Frontlichter abzuschalten braucht es irgendeine Art Eingabemöglichkeit. Wie in den folgenden Bildern zu sehn, hab ich 5 Taster auf eine PCB gefräste Kupferplatinge gelötet und diese einfach direkt mit dem Arduino verbunden, waren ja noch genug Eingänge frei.




Für mehr Grafik hat es einfach nicht gereicht. Der Arduino Nano quillt vor Daten fast über und jede Codezeile mehr kann das Fass zum Überlaufen bringen. Aaaaber es läuft soweit und das ist alles, was jetzt zählt. Möglicherweise wird der Arduino mal durch einen STM32 ersetzt werden.
Apropos Code: VescUartController_20160225.zip
Zuerst hab ich Software Serial für die Kommunikation zum VESC benutzt, da Hardware Serial zum Programmieren und Debugen belegt war. Es zeigte sich aber, dass es beim Software Serial wohlmöglich zu Timingproblemen kommt, sodass Zeitweise mehrere Sekunden lang keine neuen Daten ankamen. Mit einem fertig-5V-3V3 Converter hab ich später die RX TX Pins vom Arduino verwendet. Beim Flashen müssen diese dann kurz abgesteckt werden.
Neuer Code: VescUartController_20160422.zip

Mit dem Umstieg auf Hardware Serial kam dann auch ein schönerer Pegelkonverter dazwischen.

Das Gaspedal war bisher mit nur einer Feder gespannt, welche aber etwas zu schwach war. Mit zwei Federn ist der Widerstand nun angenehmer.
Den Schalter am Bremspedal hab ich dann, wie beim Gas durch die gleiche Hallsensorkonstruktion ersetzt, da die Scheibenbremse nicht so gut Bremst, wie die elektronische Motorbremse.


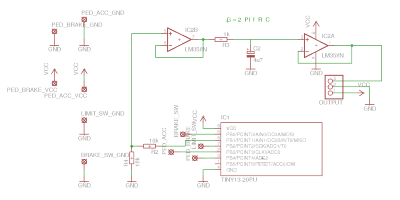
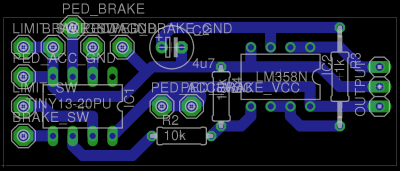
Durch diese Änderung musste die Schaltung für Bremse und Gas etwas umgeplant werden, nicht zuletzt desswegen, weil die Schaltung zuvor eigendlich für einen Rail-to-Rail Opamp ausgelegt war (was der LM358 bekannterweise nicht ist).
Attiny13 Code und Eagle Files: throttlecontroller_201605.zip
Nach den letzten etwas längeren Fahrten konnte ich am Display durch den im Motor verbauten NTC ablesen, dass dieser über 100°C warm wurde, was mir doch etwas grenzwertig erscheint. Eine Art Lüfter aus Aluminiumblech soll in Zukunft den Motor minimal belüften.


14.7.2016
Wie wir bei einem anderen Cart bemerkt hatten, sind die oberen Ecken der Radgabel eine Schwachstelle und reißein schonmal den Stahl auseinander. Damit mir das nicht passiert hab ich vorsorglich an der Stelle eine platte an das offene Ende geschweiß
Beim herausziehen der Gabel kam mir dann das, was vom unteren Kugellager des Steuersatzes übrig war entgegen. Da ich allerdings keinen Ersatz hatte kamen die Kugeln mit den Abstandshaltern erstmal wieder vorsichtig da rein, funktioniert so auch. Ersatz ist bestellt.


Damit es einfacher wird den Crazymode zu aktivieren hab ich den Hebel um 10 cm verlängert. Der leichte Winkel ist übringens gewollt.

Wie in dem an selbigen Tag entstandenen Video zu sehen, sind die kleinen Gummirollen hinten eine echte Schwachstelle: Breaking Wheels - CrazyCart. Durch das eher hohe Gewicht verformen sich die Räder zwar nur minimal, aber sehr häufig, wodurch sie sich im Inneren erwärmen und schlussendlich komplett weich werden oder sogar Platzen können. Mir ist das tatsächlich selbst noch nicht passiert, aber ich bin ja auch ein Leichtgewicht. Helfen würden also jeweils zwei Räder pro Seite oder zusätzliche Laufrollen fürs geradeaus Fahren.
Wie ein paar Zeilen zuvor zu lesen, war es nicht unüblich, dass der Motor eine Innentemperatur von über 100°C erreichte. Ein paar Grad später verlieren die Magnete im Rotor ihren Magnetismus und der Motor verliert schlagartig an Leistung. Nach 5-10 Minuten abkühlen ist dann alles wieder gut.
Bei einem anderen Cart half es offensichtlich, einen starken Lüfter irgendwie durch den Motor pusten zu lassen.
Glücklicherweise fand ich noch einen 60er Serverlüfter (Delta Electronics FFC0612DE 12V 1.2A).

Ein dünnes Alublech soll den Lufstrom von vorne seitlich in den Motor umleiten. Die Schaumstoffdichtung soll die Luft am einfachen Vorbeiströmen hindern.


Befestigt wird das Blech durch ein paar Löcher mit Kabelbinder an den Gewindestangen, die den Motor halten.



In der, mittlerweile etwas vollgestopften Controllerbox befanden sich bisher nur ein 24V Stepdown, sowie ein Stepdown auf 5V. Der Lüfter braucht aber 12V, wesshalb noch ein kleiner Stepdown von 24V->12V hinzu kam.
Der Lüfter hat einen 4 Poligen Anschluss, Masse, +12V, Tacho und PWM-in. Die PWM Steuerung machte ich mir daher zu nutzen, den Lüfter über den Arduino zu regeln. Der ist nicht gerade leise.


Zuletzt kam noch ein Lüftergitter davor. Habs nicht ausprobiert, tut aber ohne bestimmt weh.
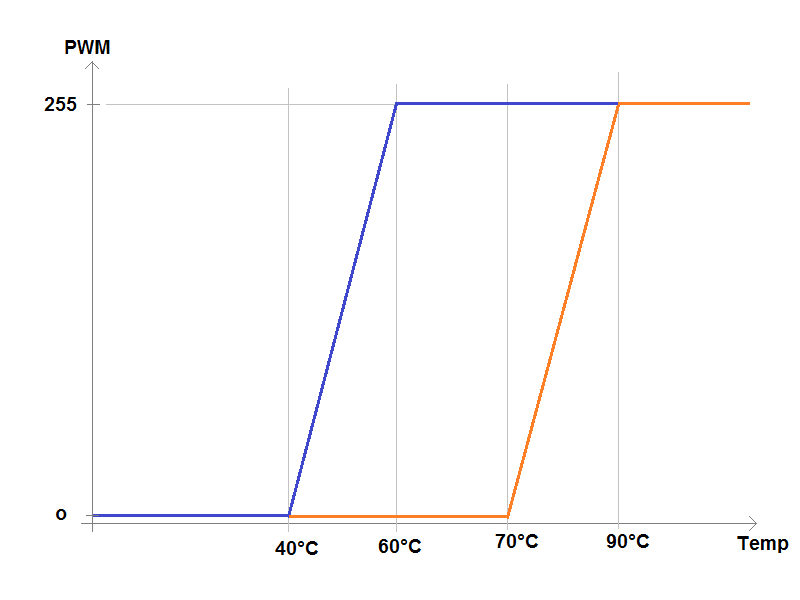
Geregelt wir der Lüfter über die im Motor gemessene Temperatur. Eine einfache lineare Regelung von Temperatur auf PWM-Wert war mir zu primitiv, da der Lüfter so nicht lange genug nachläuft um den Motor bei z.B. einer Pause weiter runterzukühlen.
Die Skizze zeigt meine verwendete Regelung, welche eine art Hysterese enthält. Der Lüfter fängt dabei erst ab 70°C an zu laufen und hat bei 90°C seine Maximalgeschwindigkeit. Sinkt die Temperatur ein wenig bleibt die Lüfterdrehzahl jedoch bis mindestens 60°C gleich und sinkt ab dort bis 40°C linear.
So die Theorie, wir werden sehn was die Praxis zeigt. Edit: Praxis funktioniert, jedoch war eine Glättung der Temperaturwerte in Software notwendig.

Seit zwei Jahren fahre ich noch die gleichen Hinterräder, was erstaunlich ist, da die Räder bei den anderen Carts trotz guter Qualität oft kaputt gingen. Um dennoch auf der sicheren Seite zu sein und weil das Rad offensichtlich runter ist sollen pro Seite zwei Rollen verbaut werden.

Dazu brauchte es neue Lenkrollen, die nun anders montiert werden müssen.
Zwei kurze Stahlprofile wurden dazu an die obere Platte durch die vorhandenen Löcher mit M6 Schrauben angeschraubt. Dabei musste ich darauf achten, dass das Stahlrohr noch gut dazwischen passt und beide Halter exakt parallel liegen (ausrichten mittels Wasserwaage), damit sie im Anschluss angeschweißt werden konnten.


Die Rollen wurden dann durch einen neuen Satz Hyper Pro 250 rollen (72mm 84A) ersetzt.


Selbst mit doppelten Hinterrädern pro Seite ist das Cart nicht Offroad tauglich. Damit es auch möglich wird, das Cart zum Fahren auf z.B. einer Wiese schnell Umzurüsten, kaufte ich zwei Lufträder (a 12€) mit einem 1m langen Stahlrohr mit 20mm Aussendruchmesser, auf dem die Nadellager der Räder laufen sollen.


Die Stange wird durch drei Stücke quadratisches Stahlprofil gesteckt, welche hinten am Rahmen angeschweisst wurden. Mehrere Spacerstücke aus größerem Stahlrohr und ein paar große Unterlegschreiben helfen dabei, die Räder an ihrem Platz zu halten und arretieren gleichzeitig die neigbaren Lenkrollen.
An beiden Enden der Stange werden M4 Schrauben oder später Splinte die Konstruktion zusammenhalten. Zum Zerlegen reicht es, eine Seite zu lösen und die Stange zur anderen Seite rauszuziehen.




Mehrmals musste ich bereits den Seilzug für die Scheibenbremse reparieren, da er durch das häufige Biegen abgerissen war. Als Verbesserung habe ich mir überlegt, das Seil um eine kleine Rolle umzulengen, sodass am Befestigungspunkt keine seitlichen Kräfte auftreten.
Beim Gaspedal ist die Stange zum Hallsensor relativ lang und biegt sich somit recht leicht durch. Als Optimierung ist sie nun durch ein POM Block als Führung in der Mitte gesteckt.
Nach diesen kleinen fixes und Aufpumpen des Rades funktioniert das Crazycart auch in 2024 weiterhin gut.


